 2015-02-27
2015-02-27 2500
25005.1. Регулирование скорости вращения электродвигателей переменного тока
Из выражения определяющего скорость вращения асинхронного двигателя  следует, возможны следующие основные способы регулирования:
следует, возможны следующие основные способы регулирования:
– изменением частоты тока f питающего сети;
– изменением числа пар полюсов Р;
– изменением скольжения S для двигателей с фазным ротором;
– изменением подводимого напряжения U, так как М дв  U 2
U 2
Возможны и другие способы регулирования скорости: импульсное, с помощью дросселей насыщения, каскадное, включение с другими электрическими машинами.
Регулирование скорости вращения изменением частоты тока f питающей сети требует установки преобразователей частоты: статических преобразователей (ПЧ) различного типа, генераторов и ранее применяемых синхронных и асинхронных преобразователей, которые усложняли и удорожали устройство и имели низкий КПД из-за многократного преобразователя энергии. В сельском хозяйстве имеют место в электроприводе ручного инструмента и электропил, водоснабжении, теплицах.
Механические характеристики асинхронного двигателя при частотном регулировании представлены на рис. 5.1.
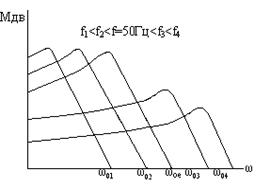
Рис. 5.1. механические характеристики асинхронного двигателя при частотном регулировании при М с = const
Данный способ называется частотным, является одним из наиболее перспективных и широко внедряется. Особенности данного способа регулирования: возможно регулирование вверх и вниз от основной скорости вращения; диапазон регулирования Д = 10…15: 1 и выше 



 ; для сохранения высокой жесткости механической характеристики, достаточной перегрузочной способности и получения высоких технологий энергетических показателей двигателя необходимо изменить одновременно с частотой тока f и напряжение по закону при М с = const U / f = const, для вентиляторного характера момента нагрузки, U/f 2=const и для момента нагрузки, обратно пропорционально скорости
; для сохранения высокой жесткости механической характеристики, достаточной перегрузочной способности и получения высоких технологий энергетических показателей двигателя необходимо изменить одновременно с частотой тока f и напряжение по закону при М с = const U / f = const, для вентиляторного характера момента нагрузки, U/f 2=const и для момента нагрузки, обратно пропорционально скорости  = const; получаются весьма жесткие характеристики при любой скорости; критический момент увеличивается с уменьшением частоты при постоянном напряжении; для поддержания достаточной перегрузочной способности необходимо, чтобы при малых частотах напряжение уменьшилось в меньшей степени, чем частота; при одновременном изменении частоты и напряжения критический момент остается приблизительно постоянным; получается постоянная располагаемая мощность, если напряжение постоянно, и постоянный момент, при напряжении пропорциональным скорости вращения.
= const; получаются весьма жесткие характеристики при любой скорости; критический момент увеличивается с уменьшением частоты при постоянном напряжении; для поддержания достаточной перегрузочной способности необходимо, чтобы при малых частотах напряжение уменьшилось в меньшей степени, чем частота; при одновременном изменении частоты и напряжения критический момент остается приблизительно постоянным; получается постоянная располагаемая мощность, если напряжение постоянно, и постоянный момент, при напряжении пропорциональным скорости вращения.
Регулирование скорости вращения изменением числа пар полюсов Р возможно только при равенстве числа пар полюсов как статора, так и ротора. Короткозамкнутый ротор с беличьей клеткой обладает ценным свойством автоматически образовывать число пар полюсов, равные числу пар полюсов обмотки статора. В двигателях с фазным ротором требуются дополнительные контактные кольца, что увеличивает его габариты и стоимость. Поэтому многоскоростные двигатели как правило короткозамкнутые.
Изменение числа пар полюсов статора выполняется двумя способами: во первых, можно иметь две и более обмоток на статоре, выполненных на разные числа пар полюсов, и менять скорость путем включения той или иной обмотки; во-вторых, можно делить каждую фазную обмотку на части и переключением их получать разное число полюсов. Регулирование скорости, достигаемое переключением полюсов, дает определенный ряд синхронных скоростей, об/мин: 3000,1500, 1000, 750, 600, 500, 375 или диапазоны регулирования Д = 2…8:1. Увеличивать этот диапазон практически нецелесообразно, так как уменьшение синхронной скорости ниже n о = 375 об/мин приводит к значительному увеличению габаритов двигателя и потери его устойчивости. Механические характеристики асинхронного двигателя при изменении числа пар полюсов представлены на рис.5.2. при соединении обмоток:
1 – последовательно в Y;
2 – параллельно в ∆ (ω o2 = ω o1);
3 – последовательно в ∆;
4 – двойную Y (ω o4 = 2 ω o3);
5 – последовательно в Y;
6 – двойную Y (ω o6 = ω o5).
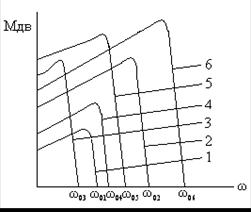






Рис. 5.2. Механические характеристики асинхронного двигателя при изменении числа пар полюсов
Особенности данного способа регулирования: возможно только ступенчатое регулирование; регулирование не связано с существенными потерями энергии, хотя при большом числе полюсов КПД двигателя несколько ниже и поэтому способ экономически выгоден; механические характеристики при всех скоростях остаются жесткими; потребляемая мощность и развиваемый момент для различных схем переключения могут изменяться по разному, существуют схемы с постоянной мощностью и постоянным моментом; величина максимального момента зависит от применяемой схемы переключения полюсов; при большем числе передач количество выводов делается большим, следовательно, требуется громоздкое коммутационное устройство. Способ находит применение в металлорежущих станках (уменьшение механических передач), вентиляторах, насосах, элеваторах.
Для асинхронного двигателя с фазным ротором применяется регулирование скорости вращения путем изменении сопротивления добавочного резистора в цепи ротора. При введении сопротивления величина скольжения возрастает, а скорость при заданном нагрузочном моменте будет снижаться.
Рис. 5.3. Механические характеристики асинхронного двигателя прия изменении сопротивления ротора
Особенности данного способа регулирования: регулирование скорости в двигательном режиме выполняется вниз от основной скорости; механические характеристики получаются мягкими, более пологими; модуль жесткости механических характеристик уменьшается при снижении скорости; потери мощности ∆Р пропорциональны скольжению S, то есть  (Р 1, Р 2 – соответственно мощности потребляемая двигателем из сети и полезная на валу двигателя); отсюда при увеличении скольжения, например, в 2 раза по сравнению с SН и снижения скорости всего на 8…15%, допустимый момент уменьшается в 2 раза; следовательно диапазон регулирования ограничен и не превышает 2:1; исходя из вышеизложенного, способ регулирования является неэкономичным.
(Р 1, Р 2 – соответственно мощности потребляемая двигателем из сети и полезная на валу двигателя); отсюда при увеличении скольжения, например, в 2 раза по сравнению с SН и снижения скорости всего на 8…15%, допустимый момент уменьшается в 2 раза; следовательно диапазон регулирования ограничен и не превышает 2:1; исходя из вышеизложенного, способ регулирования является неэкономичным.






 Регулирование скорости вращения асинхронного двигателя изменением подводимого напряжения и основано на соотношении, что М дв≡ U 2. Регулируемое напряжение подводиться к двигателю от отдельного источника питания, например, тиристорного регулятора. Управляя углом включения тиристоров (фазовое управление), можно плавно менять действующее значение напряжения. Механические характеристики асинхронного двигателя с короткозамкнутым ротором при изменении подводимого напряжения представлены на рис.5.4.
Регулирование скорости вращения асинхронного двигателя изменением подводимого напряжения и основано на соотношении, что М дв≡ U 2. Регулируемое напряжение подводиться к двигателю от отдельного источника питания, например, тиристорного регулятора. Управляя углом включения тиристоров (фазовое управление), можно плавно менять действующее значение напряжения. Механические характеристики асинхронного двигателя с короткозамкнутым ротором при изменении подводимого напряжения представлены на рис.5.4.
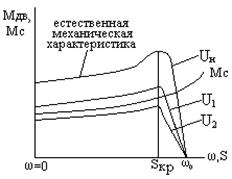



 Рис. 5.4. Механические характеристики асинхронного двигателя при изменении подводимого напряжения
Рис. 5.4. Механические характеристики асинхронного двигателя при изменении подводимого напряжения
Особенности данного способа регулирования: плавность регулирования определяется правильностью изменения проводимого напряжения, φω a1; уменьшается значение максимального момента при снижении напряжения при сохранении значений синхронной скорости вращения ω о и критического скольжения SК; уменьшается модуль жесткости механических характеристик; регулирование выполняется в основном вниз от основной скорости, так как значительное увеличение напряжения ведет к нарушению механической прочности вращающихся частей; пределы регулирования, как видно из механических характеристик, ограничены даже при использовании вентиляторной нагрузки.
5.2. Регулирование скорости вращения универсального коллекторного электродвигателя
Коллекторный двигатель с последовательной обмоткой возбуждения, имеющий приблизительно одинаковые рабочие характеристики как на постоянном, так и на однофазном переменном токе, называется универсальным коллекторном двигателем (УКД). Они выпускаются на относительно малые мощности (от нескольких ватт до нескольких сотен ватт) различные скорости вращения, достигающие несколько десятков тысяч оборотов в минуту и широк применяются в устройствах автоматики и различных электробытовых устройствах.
Электрическая схема УКД представлена на рис. 5.5. Обмотка возбуждения состоит из двух катушек, одна из которых соединяется со щеткой положительной полярности, другая – со щеткой отрицательной полярности. Как видно из схемы, при работе УКД на переменном токе напряжение подается не на всю обмотку возбуждения, а только на ее часть. Этим достигается примерно одна и та же скорость вращения при номинальном моменте на валу и номинальному напряжению на постоянном и переменном токе.
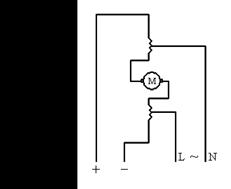


 Рис. 5.5. Электрическая схема УКД
Рис. 5.5. Электрическая схема УКД
Регулирование скорости вращения УКД можно осуществлять следующими основными способами: при работе на постоянном токе путем включения в цепь якоря реостата последовательно и параллельно ему (шунтирование обмотки якоря), изменением питающего напряжения и тока возбуждения (шунтирование обмотки возбуждения реостатом); при работе на переменном токе изменением питающего напряжения и реже – включением реостата в цепь якоря.
Сравнение перечисленных способов регулирования скорости вращения показывает, что наиболее экономичным из них является способ шунтирования обмотки возбуждения. Изменение скорости вращения путем шунтирования обмотки якоря или включением добавочного сопротивления последовательно с якорем осуществляется просто, однако эти способы регулирования неэкономичны из-за электрических потерь в добавочных сопротивлениях. По этой же причине неэкономичен и способ регулирования скорости вращения изменением подводимого напряжения к двигателю, если оно осуществляется с помощью реостата. Более экономичным регулирование скорости будет в том случае, когда вместо реостата, используется автотрансформатор с плавным регулированием напряжения или источник питания с регулируемой ЭДС. При этом скорость вращения якоря можно как повышать, так и понижать по сравнению с номинальной. При шунтировании обмотки возбуждения достигается только повышение скорости вращения из-за уменьшения магнитного потока двигателя, вызванного снижением тока возбуждения. При шунтировании обмотки якоря и включении сопротивления последовательно с якорем скорость вращения уменьшается по сравнению с номинальной из-за увеличения тока, проходящего по обмотке возбуждения, следовательно и магнитного потока, обратно пропорционального скорости, а во втором случае за счет снижения напряжения на якоре. Изменять скорость вращения можно и сдвигом щеток с геометрической нейтрале против направления вращения якоря. На практике этим часто пользуются для достижения скорости вращения, возможно более близкой к заданной.
5.3. Импульсное регулирование скорости вращения электродвигателей постоянного и переменного токов
В последние годы в связи с развитием полупроводниковой техники получил распространение импульсный способ регулирования скорости и координат электропривода, применение которого в ряде случаев позволяет упростить его силовую схему и повысить надежность ее работы. Этот способ является к тому же практически единственным в случае питания двигателя от нерегулируемого источника постоянного тока (аккумуляторной батареи, неуправляемого выпрямителя и так далее), а для двигателей переменного тока от источника питания нерегулируемого напряжения.
Регулирование скорости вращения двигателя постоянного тока при использовании этого способа осуществляется импульсным изменением напряжения, магнитного потока или сопротивления резистора в якорной цепи, то есть рассмотренным основными способами регулирования. Применительно к асинхронным двигателям переменного тока сущность импульсного способа регулирования координат заключается в периодическом импульсном изменении параметров цепей двигателя или питающей сети (напряжения подводимого к двигателю, сопротивления резисторов в цепях ротора или статора).
Импульсное регулирование указанных параметров осуществляется с помощью управляемого ключа того или иного типа. Основным показателем работы ключа является заполнение или скважность управляющих импульсов, определяемое отношением времени замкнутого состояния ключа t1 к периоду его коммутации T = t 1+ t 2 (рис.5.6.), где t 2 – время замкнутого состояния
 (5.1)
(5.1)
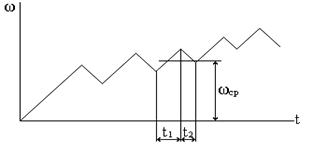



 Рис. 5.6. График регулирования скорости при изменении скважности замыкания ключа
Рис. 5.6. График регулирования скорости при изменении скважности замыкания ключа
Изменяя соотношение времен замкнутого и замкнутого состояний ключа можно получить требуемый закон изменения скорости вращения во времени, то есть ω = f (t). Очевидно, что при ε = 1 двигатель работает на естественной механической характеристике, при ε = 0 на реостатной характеристике.
Существует два основных способа управления ключом – широтно-импульсное и частотно-импульсное. При широтно-имульсном управлении период коммутации ключа Т остается постоянным, а изменяется время замкнутого состояния ключа t 1, то есть ширина импульса при неизменном периоде их следования. При частотно-имульсном управлении время t 1 остается неизменным, а меняется период коммутации ключа Т, обратно пропорциональной частоте.
Рассматриваем сначала импульсное регулирование скорости двигателя постоянного тока.
Импульсное регулирование сопротивления добавочного резистора в цепи якоря осуществляется путем периодической коммутации по определенному закону, включенного параллельно резистору R д (рис.5.7.)
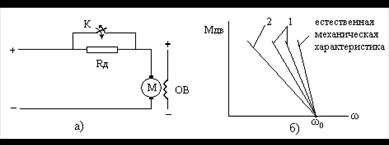
Рис. 5.7. Схема регулирования скорости шунтового двигателя с импульсным изменением сопротивления резистора в цепи якоря (а) и механические характеристики (б)
Семейство механических характер получается при анализе граничных значений работы ключа. При ε =1 резистор выведен из цепи якоря и двигатель работает на естественной механической характеристике. Если ε =0, резистор введен в цепь якоря и двигатель работает на искусственной характеристике 2. При 0< ε <1 механические характеристики 1 располагаются между двумя граничными характеристиками.
При импульсивном регулировании магнитного потока двигателя в цепь обмотки возбуждения включается добавочный резистор R д, шунтированный ключом (рис. 5.8)


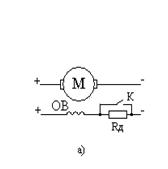
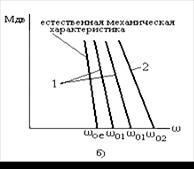
Рис. 5.8. Схема регулирования скорости вращения шунового двигателя импульсивным изменением магнитного потока (а) и механические характеристики (б)
Для получения семейства искусственных характеристик скважность ключа регулируется в пределах от 0 до 1. При ε = 1 ключ постоянно замкнут, резистор R д зашунтирован, по обмотке протекает номинальный ток и двигатель работает на естественной характеристике. Когда ε = 0, ключ постоянно разомкнут, резистор R д введен в цепь обмотки возбуждения, ток возбуждения и магнитный поток уменьшены, чему соответствует искусственная характеристика 2. При значениях 0<ε<1 двигатель работает на промежуточных характеристиках 1.
Ключом при импульсивном регулировании напряжения на якоре двигателя якорь периодически подключается к источнику напряжения U (рис. 5.9.). При замкнутом ключе ток в якоре двигателя протекает под действием напряжения U источника, а при разомкнутом – под действием ЭДС самоиндукции, замыкаясь через диод VD.
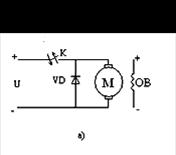
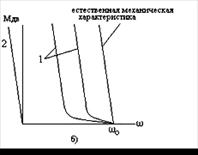
Рис. 5.9. Схема регулирования скорости вращения шунтового двигателя импульсным изменением напряжения (а) и механические характеристики (б)
Ток в якоре имеет при этом пульсирующий характер. При ε = 1 на якорь двигателя постоянно подается полное напряжение источника и этому соответствует естественная характеристика. Если ε =0, то напряжение не подается U =0, двигатель включен по схеме динамического торможения и его механическая характеристика 2 проходит через начало координат. Промежуточным значениям скважности 0< ε <1 соответствуют механические характеристики 1, располагаемые между граничными характеристиками.
Рассматриваем далее импульсивное регулирование скорости асинхронного двигателя переменного тока.
Для импульсивного регулирования сопротивлений R д резисторов в цепи ротора, параллельно резисторам R д, включены контакты управляемого ключа (рис. 5.10).
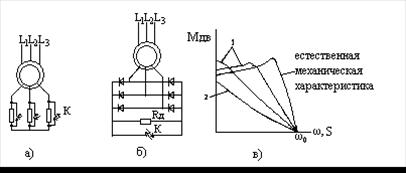
Рис. 5.10. Схема импульсного регулирования резисторов в цепи ротора асинхронного двигателя (а), в цепи выпрямленного тока (б) и механические характеристики (в)
Аналогичная задача решается и в схеме с использованием выпрямителя и резистора R д, включенного в цепь выпрямленного тока ротора, шунтируемого ключом.
Использование схем обеспечивает получение семейства искусственных механических характеристик, при различных значениях ε. При ε = 1 ключ постоянно разомкнут, резистор закорочен и двигатель работает на естественной механической характеристике. При ε = 0 ключ постоянно разомкнут, резистор полностью введен в цепь ротора и двигатель работает на искусственной характеристике 2. При промежуточных значениях скважности 0< ε <1 искусственные характеристики 1 располагаются между граничными. Аналогично могут быть получены характеристики двигателя при импульсном регулировании сопротивления добавочного резистора в цепи статора при включении управляемых ключей параллельно резисторам (рис. 5.11).
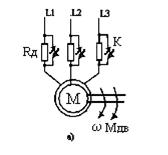
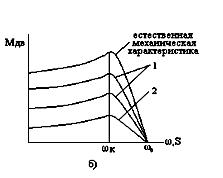
Рис.5.11. Схема импульсного регулирования резисторов в цепи статора асинхронного двигателя (а) и механические характеристики (б)
Работа управляемых ключей с переменной скважностью 0< ε <1 обеспечивает семейство искусственных механических характеристик от естественной ε = 1, ключ постоянно замкнут до граничной 2 (ε = 0, ключ постоянно разомкнут, резистор введен в цепь статора).
Импульсное регулирование напряжения на статоре асинхронного двигателя реализуется с помощью тиристорного регулятора напряжения, автотрансформатора, дросселя насыщения аналогично способу регулирования скорости вращения изменением проводимого напряжения и рассмотренного ранее. В этом случае регулируется напряжение на статоре двигателя и реализуются искусственные механические характеристики, аналогичные изображенным на рис. 5.4.








