2015-02-27
2015-02-27 644
644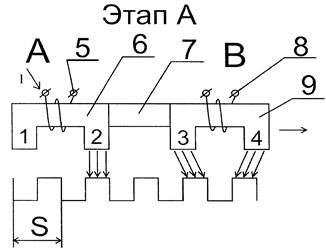
1,2,3,4 - Зубья
5 – Обмотка возвуждения
6 - магнитопровод обмотки А
7 - постонный магнит
8 - Обмотка возвуждения
9 - магнитопровод обмотки В
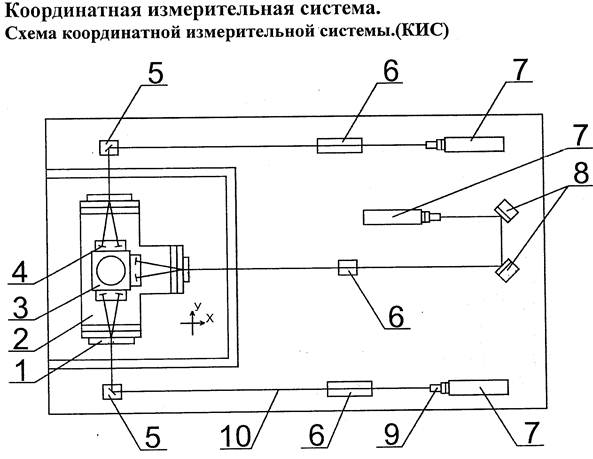
Статор изготовлен из диабаза с наклеенным на нем листом из магнитомягкой стали, на верхней поверхности которого вдоль осей X и У нарезании канавки 3. Канавки заполнены немагнитным компаундом, после чего проводится шлифовка, неплоскостность 5 мкм. Индуктор 1 выполнен в виде группы магнитов 2, заключённый в общий корпус - постоянный магнит 7. Магнитопроводы 6,9 и обмотки управления 5,8, для управления перемещения и позиционирования индуктора относительно пластины статора используется сила магнитного взаимодействия между ними.
Зазор между индуктором и пластиной (15-25 мкм.) создаётся благодаря уравновешиванию сил притяжения, создаваемых постоянными магнитами и сил отталкивания, создаваемых сжатым воздухом, подаваемым под давлением 3*105 Па. Через жиклер 4. Это обеспечивает:
Исключение механического трения.
Точность позицинирования.
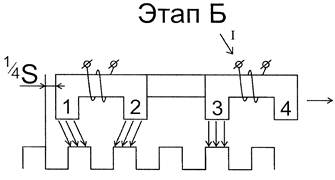
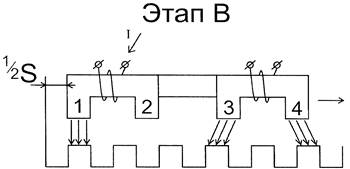
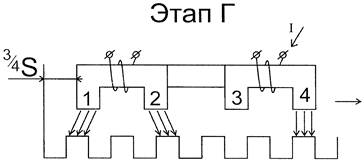
При. возбуждении обмотки управления А магнитный поток постоянного магнита переключается в зубец 2, который устанавливается против зубца пластины. Отключение обмотки А и возбуждение обмотки В приводит к переключении магнитного потока в зубец 3 и перемещению индуктора вправо на ¼ периода зубчатой структуры пластин. При изменении направления тока в обмотке А и отключении тока в обмотке В магнитной поток снова перемещается в зубец 1, а индуктор перемещается вправо на ¼ периода зубчатой структуры пластин. Далее изменяется направление тока в обмотке В и отключается ток в обмотке А. Магнитный поток переключается в зубец 4, индуктор перемещается вправо на ¼ периода зубчатой структуры пластин. Затем коммутация обмоток управления повторяется в том же порядке, обеспечивая движение индуктора вправо. Для передвижения влево изменяется порядок коммутирования обмоток управления. Перемещение индуктора вдоль оси У осуществляется аналогично, только коммутируется магнитопровод по У.
Дискретность перемещений может быть повышена за счёт квантования тока в обмотках управления, например четырёхфазный ЛШД с периодом зубчатой структуры 480 мкм и числом уровней квантования 48 будет иметь шаг перемещения 10 мкм. Регулировка частоты питающего тока позволяет обеспечить разгон и торможения индуктора с ускорением 9.8 м/с2 при максимальной скорости перемещения 100-300 мм/с.