 2015-02-27
2015-02-27 3465
3465Тахогенераторы переменного тока подразделяются на синхронные и асинхронные. Основным преимуществом тахогенераторов переменного тока является отсутствие коллектора и щеток. Конструкция синхронного тахогенератора и зависимость его выходного напряжения от скорости вращения ротора приведены на рисунке 8.2.
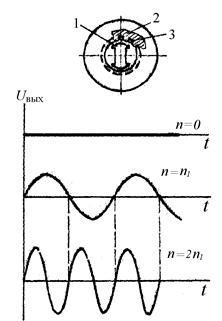
Рисунок 8.2 – Конструкция синхронного тахогенератора; зависимость выходного напряжения тахогенератора от частоты вращения
Тахогенератор состоит из статора 2, в пазах которого размещена обмотка 3, и якоря 1, представляющего собой магнит постоянного тока с несколькими полюсами. При вращении якоря в обмотке статора наводится переменная ЭДС, имеющая синусоидальную форму. Амплитуда и частота ЭДС пропорциональны скорости вращения якоря, что видно из рисунка 8.2.
Синхронные тахогенераторы не получили большого распространения из-за наличия следующих недостатков:
§ частота его выходного напряжения не постоянна;
§ фаза выходного напряжения не зависит от направления вращения, т. е. тахогенератор нечувствителен к изменению направления вращения.
Асинхронные тахогенераторы более широко распространены. Конструкция асинхронного тахогенератора изображена на рисунке 8.3.
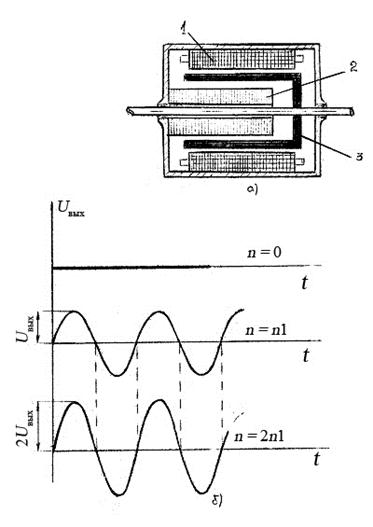
Рисунок 8.3 – Тахогенератор асинхронный
а) конструкция асинхронного тахогенератора; б) зависимость выходного
напряжения тахогенератора от частоты вращения
На статоре 1 расположены две обмотки, сдвинутые относительно друг друга на 90°. Одна из них является обмоткой возбуждения, другая выходной обмоткой. Ротор 3 тахогенератора выполнен в виде тонкостенного стакана, который вращается между статором 1 и внутренним неподвижным ферромагнитным сердечником 2. Обмотка возбуждения питается от сети переменного тока; в выходной обмотке наводится ЭДС переменного тока, амплитуда которой пропорциональна скорости вращения ротора, а частота равна частоте сети, питающей обмотку возбуждения. При изменении направления вращения фаза выходного напряжения меняется на обратную. Из рисунка 8.3 видно, что при различных значениях скорости вращения частота выходного напряжения не меняется, а меняется только его амплитуда.
Синхронные и асинхронные тахогенераторы не имеют скользящих контактов, просты по конструкции и поэтому надежнее и дешевле тахогенераторов постоянного тока, но имеют меньшую точность и линейность характеристики.
Импульсный индукционный датчик частоты вращения
Для измерения частоты вращения применяются также импульсные индукционные датчики (рисунок 8.4), у которых выходной величиной является частота следования импульсов выходного напряжения. Такой датчик содержит постоянный магнит 1, на котором размещена обмотка и прерыватель магнитного потока, в качестве которого используются стальной диск 4 с отверстиями 2 или крыльчатка. Диск укрепляется на валу 3, скорость вращения которого нужно измерить. При вращении диска, когда отверстие окажется против катушки, воздушный зазор в магнитной цепи увеличивается, магнитный поток уменьшается. За счет изменения магнитного потока в катушке наводится импульс напряжения. Таким образом, за один оборот диска в катушке возникает один импульс напряжения, если в диске одно отверстие. Чтобы за один оборот диска получилось больше импульсов, увеличивают число отверстий. При этом частота следования импульсов будет пропорциональна скорости вращения диска. Частоту импульсов измеряют цифровым частотомером или специализированным прибором – цифровым тахометром.
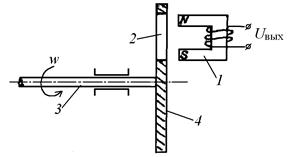
Рисунок 8.4 – Импульсный индукционный датчик частоты вращения
Структурная схема цифрового тахометра приведена на рисунке 8.5.
Импульсы с датчика частоты вращение ДИ поступают на вход формирователя ФИ, который формирует импульсы прямоугольной формы и стабильной амплитуды. Эти импульсы поступают на вход электронного ключа К, который управляется от распределителя импульсов РИ, открывающего ключ на фиксированный промежуток времени, в течение которого импульсы с датчика частоты вращения через ключ поступают на вход счетчика СЧ и подсчитываются.
При истечении интервала счета распределитель РИ закрывает ключ и переписывает вторым импульсом информацию из счетчика СЧ в регистр памяти с дешифратором ДШ. Третий импульс с РИ сбрасывает счетчик в нулевое положение, после чего процесс измерения повторяется. При каждом цикле на цифровом индикаторе ЦИ отображается значение частоты вращения в об/мин. Например, если крыльчатка датчика частоты вращения имеет 20 зубьев, то за один оборот с датчика импульсов на вход цифрового измерителя частоты поступит 20 импульсов.
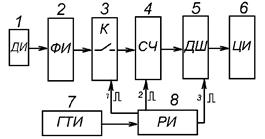
Рисунок 8.5 – Структурная схема цифрового тахометра
При времени измерения, равном 1 с, частота импульсов с датчика:
f = n 1 m, (8.8)
где n 1 – количество оборотов вала двигателя за 1 секунду;
m – число зубьев;
n = 60 f/m, об/мин;
или
m = 20;
n = 3 f.
Если используется стандартный цифрой частотомер обычно имеющий измерительный интервал 1 секунду, его показания при числе зубьев m = 20 следует умножать на 3, чтобы получить значение частоты вращения в об/мин. Если использовать крыльчатку с 60 зубьями, то n = f.
Описание лабораторной установки
Установка состоит из двигателя постоянного тока с параллельным возбуждением 1, регулятора 2, тахогенератора постоянного тока с возбуждением от постоянного магнита 3, вольтметра постоянного тока 4, индукционного импульсного датчика частоты вращения 5 и цифрового частотомера 43-35А. На валу двигателя насажены стальная крыльчатка с 20 зубьями и тахогенератор. Рядом с крыльчаткой закреплен индукционный датчик. Крыльчатка при вращении замыкает и размыкает постоянный магнитный поток, создаваемый магнитной системой индукционного датчика, в результате чего в его обмотке наводятся импульсы напряжения, частота которого пропорциональна частоте вращения вала двигателя. Частота вращения двигателя изменяется при помощи регулятора напряжения 2. Напряжение на выходе тахогенератора измеряется вольтметром постоянного тока 4 и цифровым вольтметром 7, а частота импульсов индукционного датчика измеряется цифровым частотомером ЧЗ-35А.
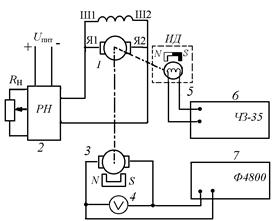
Рисунок 8.6 – Схема лабораторной установки








