 2015-02-27
2015-02-27 1251
1251Телемеханикой – называют область техники и научную дисциплину, охватывающую теорию и технические средства преобразования и передачи на расстояние информации для управления производственными процессами.
В телемеханике принято выделять телеуправление, телесигнализацию, телеизмерение.
Системы телеизмерения – осуществляют передачу непрерывного ряда значений измеряемой величины для наблюдения за этими величинами или их регистрации.
Системы телесигнализации – передают различного рода дискретные сообщения о ходе производственных процессов: сигналы о достижении контролируемыми параметрами предельных значений, о возникновении аварийного состояния, о вводе в действие и выводе из работы технологического оборудования. Системы телеизмерения и телесигнализации называют еще системами телеконтроля.
Системы телеуправления – применяются для передачи команд управления производственными установками: включение и отключение оборудования, изменения нагрузки, скорости движения, регулирования подачи жидкостей и газов и т. д. В зависимости от характера команд передаваемые сообщения могут быть как непрерывными (например, плавное изменение нагрузки), так и дискретными (например, включение или отключение оборудования). В промышленных системах телеуправления в большинстве случаев применяется передача дискретных сообщений.
Разновидность систем телемеханики – телеавтоматика, которая обеспечивает управление объектами на расстоянии без непосредственного участия человека. В таких системах функции контроля и выработки сигналов управления обычно возлагаются на ЭВМ.
На рисунке 12.1 показана функциональная схема основных элементов системы телемеханики, в частности системы ТУ. Источник информации хранит и в соответствующее время выдает исходные данные, которые необходимо передавать на расстояние. Распределитель (шифратор) в определенной последовательности подключает к передатчику цепи, с которых снимаются сигналы-приказы. Передатчик преобразует сигналы в тот вид, который удобен для передачи их по КС. Канал связи обеспечивает передачу закодированных сигналов на требуемое расстояние. Приемник воспринимает закодированные сигналы из КС и преобразует их в вид, удобный для передачи в избиратель. Избиратель (дешифратор) выбирает из большого числа закодированных сигналов тот, который был послан от источника информации, и преобразует его в величину, удобную для приема получателем информации.
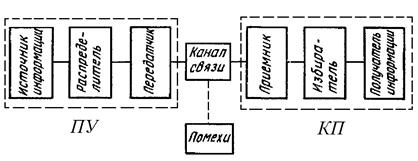
Рисунок 12.1 – Функциональная схема системы ТУ
Системы телемеханики могут иметь и другие, отличающиеся от рассмотренной, функциональные схемы.
По структуре линий связи системы телемеханики могут быть (рисунок 12.2): радиальные, в которых каждый контролируемый пункт (КП) соединен с пунктом управления (ПУ) отдельной линией; цепочечные, обеспечивающие работу при последовательном или параллельном подключении КП к одной линии связи; с древовидной структурой линий связи, предусматривающие соединение ПУ с несколькими КП по произвольно разветвленной сети линий связи.
Рисунок 12.2 – Структуры систем телемеханики:
а – радиальная; б – цепочечная; в – древовидная
Телемеханические системы подразделяются на одноканальные и многоканальные.
В одноканальных системах сигнал соответствует одному сообщению об определенном объекте управления или контроля. В многоканальных системах сигнал соответствует ряду сообщений.
В системах телемеханики стремятся уменьшить число каналов связи из-за их высокой стоимости и материалоемкости. Поэтому для увеличения количества передаваемой информации используют сигналы с большим количеством качественных признаков. В основном это сигналы, различающиеся по частоте или длительности импульсов и пауз. Их применение оправдано лишь при значительных расстояниях между ПУ и КП.
В системах телемеханики ближнего действия для преобразования (селекции) сигналов используют только амплитудный признак тока и групповой метод избрания.
При амплитудном разделении по уровню каждому сигналу присваивается своя амплитуда тока или напряжения.
Пусть требуется по одной и той же линии передать два независимых сигнала, отличающихся по уровню тока. На рисунке 12.3 приведена схема поясняющая принцип амплитудного модулирования.
Рисунок 12.3 – Принципиальная электрическая схема дистанционного управления электромагнитным пускателем
Электромагнитный пускатель КМ (рисунок 12.3) включается дистанционно посредством кнопки SB1 и электромагнитного реле с механической фиксацией. Отключение производится посредством кнопки SB2. Как при этом получить известительную сигнализацию, не прибегая к дополнительным линиям канала связи (КС)?
Поставленная цель может быть достигнута путем использования транзисторов VT1 и VT2, в коллекторную цепь которых включаются соответствующие сигнальные лампы HL1 и HL2. Ток контроля, протекающий по базе транзистора, на порядок ниже тока срабатывания включающей и отключающей обмотки реле KV, за счет введения в цепь сигнализации дополнительного сопротивления R1 и R2.
Таким образом, применение здесь амплитудного признака тока позволяет уменьшить число линий КС в два раза и контролировать состояние оперативных цепей.
В дополнение к рассмотренному способу амплитудного модулирования часто применяют групповой выбор. При этом объекты телеуправления подразделяются на группы и операция выбора разбивается на две части:
• выбор группы, которой принадлежит данный объект;
• выбор объекта в группе.








