 2015-02-27
2015-02-27 766
766Устройство, типы, принцип действия коммутационных аппаратов, представленных в работе, изучить на натурных образцах аппаратов, по методическим указаниям и литературе.
Для изучения устройства и принципа работы системы управления уровнем комбикорма в бункере воспользоваться лабораторной установкой, моделирующей систему управления.
Лабораторная установка выполнена в виде пульта-макета управления транспортером, подающим корм в бункер (рисунок 11.9).
В бункере 1 установлено два датчика нижнего (ДНУ) и верхнего (ДВУ) уровней корма. Первичным преобразователем датчика служит упругая мембрана 2, воспринимающая давление корма на стенки бункера. При отсутствии корма в бункере контакты датчика замкнуты, при давлении корма на мембраны контакты размыкаются. Контакты датчиков включены в схему управления трехфазным асинхронным двигателем привода загрузочного транспортера (рисунок 11.10).
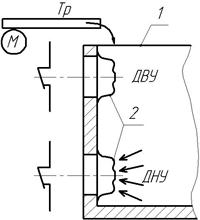
Рисунок 11.9 – Схема расположения датчиков уровня в загрузочном бункере
Схема может работать в ручном и автоматическом режимах. Выбор режима осуществляется с помощью трехпозиционного переключателя SA1. Если рукоятка управления переключателя SA1 находится в положении 0, то питание на схему не подается. Ручной режим управления осуществляется при постановке рукоятки выключателя SA1 в положение 1. В этом случае управление двигателем аналогично, как и в схеме рисунка 11.8.
Автоматический режим управления осуществляется при постановке рукоятки переключения в положение 2.
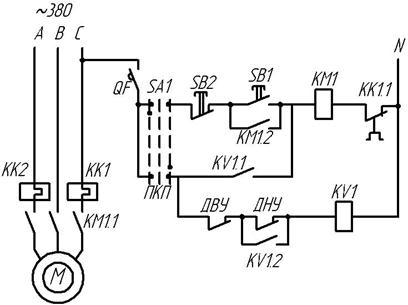
Рисунок 11.10 – Схема управления загрузочным транспортером
При отсутствии комбикорма в бункере контакты ДНУ и ДВУ замкнуты, напряжение подается на катушку KV1 промежуточного реле, последнее срабатывает и замыкает контакты KV1.1 и KV1.2. С замыканием контакта KV1.1 подается напряжение на катушку магнитного пускателя КМ1 силовые контакты которого КМ1.1 подключают двигатель М к сети и транспортер начинает подавать корм в бункер. При достижении кормом уровня установки датчика нижнего уровня контакты ДНУ размыкаются, но транспортер продолжает подавать корм в бункер, т. к. цепь катушки KV1 остается замкнутой благодаря замкнутому контакту КV2. При достижении кормом верхнего уровня установки ДВУ размыкает свой контакт и цепь питания катушки KV1 размыкается. Катушка KV1 обесточивается и контакты KV1.1 и KV1.2 размыкаются, при этом пропадает напряжение на катушке КМ1, размыкаются контакты КМ1.1 и останавливается транспортер. При выгрузке корма из бункера вначале срабатывает ДВУ и его контакт замыкается, но цепь питания катушки KV1 остается разомкнутой, т. к. разомкнут ДНУ. При снижении уровня корма ниже установки ДНУ последний замыкает свой контакт и, как было описано выше, транспортер снова включается в работу.








