 2015-02-27
2015-02-27 1484
14841. Структурная схема статического устройства П-АРУ.
2. Следящая система.
3. Переходные процессы установления уровня контрольного сигнала
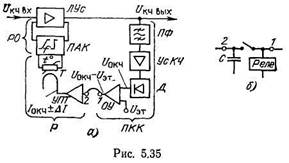
Устройства АРУ, управляемые контрольным сигналом (П— АРУ), по принципу действия можно разделить на две большие группы: статические и астатические. На рис. 5.35,а приведена структурная схема статического устройства П-АРУ. Контрольный сигнал с напряжением  выделяется на выходе линейного усилителя ЛУс полосовым фильтром ПФ, усиливается усилителем УсКЧ и поступает на детектор Д, который выделяет огибающую контрольной частоты с напряжением
выделяется на выходе линейного усилителя ЛУс полосовым фильтром ПФ, усиливается усилителем УсКЧ и поступает на детектор Д, который выделяет огибающую контрольной частоты с напряжением  , пропорциональным
, пропорциональным  . Напряжение
. Напряжение  сравнивается с эталонным в
сравнивается с эталонным в  схеме сравнения, выполненной на операционном усилителе ОУ. Заметим, что совокупность элементов, выполняющих функции, аналогичные функции ПФ, УсКЧ, Д, ОУ и источника эталонного напряжения, обычно называется приемником контрольного канала (ПКК). Разностный сигнал (
схеме сравнения, выполненной на операционном усилителе ОУ. Заметим, что совокупность элементов, выполняющих функции, аналогичные функции ПФ, УсКЧ, Д, ОУ и источника эталонного напряжения, обычно называется приемником контрольного канала (ПКК). Разностный сигнал ( —)
—)  вызывает изменение выходного тока усилителя постоянного тока (УПТ) и, следовательно, изменение температуры терморезистора (Т), который является регулируемым элементом переменного амплитудного корректора (ПАК), включенного в цепь обратной связи
вызывает изменение выходного тока усилителя постоянного тока (УПТ) и, следовательно, изменение температуры терморезистора (Т), который является регулируемым элементом переменного амплитудного корректора (ПАК), включенного в цепь обратной связи  . Совокупность узлов, выполняющих функции, аналогичные функциям УПТ и Т; будем в дальнейшем называть регулятором (Р), а совокупность ПАК и ЛУс — регулируемым объектом (РО). Взаимные изменения сигналов в петле регулирования выбраны так, что отклонение
. Совокупность узлов, выполняющих функции, аналогичные функциям УПТ и Т; будем в дальнейшем называть регулятором (Р), а совокупность ПАК и ЛУс — регулируемым объектом (РО). Взаимные изменения сигналов в петле регулирования выбраны так, что отклонение  от номинального в процессе регулирования уменьшается.
от номинального в процессе регулирования уменьшается.
В данном устройстве П-АРУ имеет место пропорциональное изменение сопротивления рабочего тела термистора при изменении отклонения разности напряжения ( ) на входе регулятора. Из теории систем автоматического регулирования известно, что устройства с пропорциональным регулированием уменьшают первоначальное отклонение уровня контрольной частоты
) на входе регулятора. Из теории систем автоматического регулирования известно, что устройства с пропорциональным регулированием уменьшают первоначальное отклонение уровня контрольной частоты  раз, где
раз, где  —коэффициент передачи по петле регулирования.
—коэффициент передачи по петле регулирования.

 Таким образом, для этих устройств характерна принципиально неустранимая статическая (определенная в установившемся режиме) погрешность регулирования
Таким образом, для этих устройств характерна принципиально неустранимая статическая (определенная в установившемся режиме) погрешность регулирования  . По этой типичной погрешности подобные устройства П-АРУ носят название статических. Максимальная величина статической погрешности в реальных устройствах обычно не превышает
. По этой типичной погрешности подобные устройства П-АРУ носят название статических. Максимальная величина статической погрешности в реальных устройствах обычно не превышает  дБ.
дБ.
В устройствах астатического типа применяются интегральные регуляторы, т. е. такие, выходной сигнал в которых пропорционален интегралу входного сигнала во времени. Типичным интегральным регулятором является регулятор, содержащий магнитоэлектрическое регулирующее устройство (МРУ). При номинальном значении напряжения  (рис. 5.36), поступающего от ПКК, подвижная катушка индуктивности (ПИ) находится в некотором положении. При изменении, например увеличении
(рис. 5.36), поступающего от ПКК, подвижная катушка индуктивности (ПИ) находится в некотором положении. При изменении, например увеличении  , ПИ начинает перемещаться вверх, преодолевая силу тяжести, которая является эталоном. Это перемещение происходит медленно, так как полость МРУ заполнена вязкой жидкостью. С катушкой ПИ жестко связан магнитный элемент, помещенный в магнитном зазоре датчика индуктивности ДИ таким образом, что перемещение ПИ вверх приводит к уменьшению магнитного зазора и, следовательно, увеличению индуктивности датчика ДИ. В свою очередь, это вызывает уменьшение переменного тока подогрева термистора Т и увеличение сопротивления его рабочего тела и величины обратной связи усилителя ЛУс. Усиление усилителя ЛУс уменьшается, что приводит к снижению первоначального отклонения напряжения контрольного сигнала от номинального.
, ПИ начинает перемещаться вверх, преодолевая силу тяжести, которая является эталоном. Это перемещение происходит медленно, так как полость МРУ заполнена вязкой жидкостью. С катушкой ПИ жестко связан магнитный элемент, помещенный в магнитном зазоре датчика индуктивности ДИ таким образом, что перемещение ПИ вверх приводит к уменьшению магнитного зазора и, следовательно, увеличению индуктивности датчика ДИ. В свою очередь, это вызывает уменьшение переменного тока подогрева термистора Т и увеличение сопротивления его рабочего тела и величины обратной связи усилителя ЛУс. Усиление усилителя ЛУс уменьшается, что приводит к снижению первоначального отклонения напряжения контрольного сигнала от номинального.
В отличие от статической системы здесь процесс регулирования происходит до полной компенсации начального отклонения, поскольку усилия, уравновешивающие подвижную систему в новом положении, такие же, как и в исходном. Очевидно также, что любое положение подвижной системы является результатом всех предыдущих отклонений напряжения контрольного сигнала от номинального и соответствующих им перемещений этой систе 
 мы, т. е. пропорционально интегралу отклонений контрольного-сигнала во времени. Поэтому такие регуляторы называются интегральными.
мы, т. е. пропорционально интегралу отклонений контрольного-сигнала во времени. Поэтому такие регуляторы называются интегральными.
Для реальных устройств регуляторов интегрального типа характерна так называемая зона нечувствительности, т. е. начало их работы обеспечивается подачей конечного напряжения управляющего сигнала. Зона нечувствительности регулятора определяет величину погрешности регулирования астатического устройства АРУ, которая не зависит в отличие от статической погрешности, от величины начального отклонения напряжения контрольного сигнала и определяется исключительно конструкцией регулятора. В современных астатических устройствах АРУ величина погрешности из-за наличия зоны нечувствительности не превышает  0,7 дБ.
0,7 дБ.
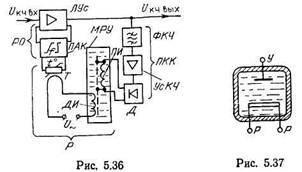
В устройствах АРУ находит также применение интегральный регулятор, называемый мемистором, действия которого основаны на электрохимических процессах. Его схематическое устройство показано на рис. 5.37. Он представляет собой баллон, заполненный раствором соли металла, из которого изготовлен управляющий электрод (У). В баллон помещен также проводник (Р—Р), выполненный из платины, который является управляемым сопротивлением ПАК- Управляющий сигнал с выхода ПКК ( -
-  ) той или иной полярности прикладывается между электродом и проводником. В зависимости от направления управляющего тока сечение проводника изменяется за счет электрохимического отложения на нем или снятия слоя металла, из которого выполнен электрод. Это изменяет сопротивление проводника и соответственно частотную характеристику затухания ПАК.
) той или иной полярности прикладывается между электродом и проводником. В зависимости от направления управляющего тока сечение проводника изменяется за счет электрохимического отложения на нем или снятия слоя металла, из которого выполнен электрод. Это изменяет сопротивление проводника и соответственно частотную характеристику затухания ПАК.
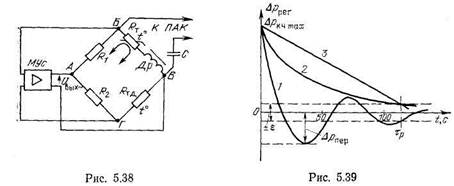
Устройства Т-АРУ значительно проще устройств П-АРУ (см.. рис. 5.31). В некоторых случаях датчик температуры грунта,, представляющий собой терморезистор, может непосредственно играть роль управляющего элемента ПАК. Следящая система используется в тех случаях, когда терморезистор необходимо вынести из помещения усилительного пункта на несколько десятков метров и есть опасность его шунтирования в рабочем диапазоне частот усилителя емкостным сопротивлением пары соединительного кабеля. Следящая система (рис. 5.38) обеспечивает обтекание термодатчика практически постоянным током (выходным током магнитного усилителя МУс) и с помощью дросселя (Др) исключает шунтирование терморезистора  элементами следящей системы. Конденсатор С исключает попадание постоянного тока в схему линейного усилителя.
элементами следящей системы. Конденсатор С исключает попадание постоянного тока в схему линейного усилителя.
 Следящая система представляет собой самобалансирующийся мост (пассивную цепь обратной связи), между диагоналями которого включен магнитный усилитель МУс. Если выполняется соотношение
Следящая система представляет собой самобалансирующийся мост (пассивную цепь обратной связи), между диагоналями которого включен магнитный усилитель МУс. Если выполняется соотношение  , мост будет сбалансирован и напряжение, поступающее с выхода МУс в диагональ АВ, на вход усилителя, включенного в диагональ БГ, не подается. При повышении температуры грунта сопротивление термодатчика
, мост будет сбалансирован и напряжение, поступающее с выхода МУс в диагональ АВ, на вход усилителя, включенного в диагональ БГ, не подается. При повышении температуры грунта сопротивление термодатчика  уменьшается, мост разбалансируется и в диагонали БГ моста появляется напряжение, пропорциональное величине ошибки.
уменьшается, мост разбалансируется и в диагонали БГ моста появляется напряжение, пропорциональное величине ошибки.
Последнее усиливается усилителем МУс, что приводит к увеличению тока через терморезистор  , повышению его температуры и, следовательно, снижению его сопротивления.
, повышению его температуры и, следовательно, снижению его сопротивления.
Изменение выходного напряжения на термодатчик не влияет, так как активные сопротивления плеч моста выбирают удовлетворяющими соотно-шению  . Таким образом, мост балансируется, что соответствует изменению
. Таким образом, мост балансируется, что соответствует изменению  пропорционально изменению
пропорционально изменению  и, следовательно, осуществлению соответствующего управления ПАК. Точность балансировки моста пропорциональна усилению МУс и может быть очень высокой.
и, следовательно, осуществлению соответствующего управления ПАК. Точность балансировки моста пропорциональна усилению МУс и может быть очень высокой.
Однако, как уже отмечалось, погрешность регулирования устройств Т-АРУ относительно велика, так как определяется не только точностью работы следящей системы, но и температурной зависимостью сопротивления конкретных датчиков и термисторов, разницей температур участков кабеля и термодатчика и т. д.
В большинстве случаев несколько (а иногда и несколько десятков) одиночных устройств П-АРУ тракта управляются одним и тем же контрольным сигналом, т. е. образуют цепь АРУ. Очевидно, что отклонение уровня контрольного сигнала от номинального значения на входе цепи АРУ воздействует на все устройства АРУ практически одновременно, вызывая в них процессы регулирования, которые продолжаются до тех пор, пока на выходе всех устройств не установятся уровни контрольного сигнала, близкие к номинальным. Очевидно также, что уровень контрольного сигнала на выходе каждого устройства изменяется не только в результате процесса регулирования в данном устройстве, но и из-за процессов регулирования во всех предыдущих устройствах. Поэтому переходной процесс в конце цепи АРУ представляет собой очень сложную картину и может иметь колебательный характер.
На рис 5.39 показаны переходные процессы установления уровня контрольного сигнала на выходе цепи П-АРУ ( ) при его I скачкообразном изменении на входе цепи в момент
) при его I скачкообразном изменении на входе цепи в момент  на вели- I чину
на вели- I чину  , имеющие колебательный (кривая 1), апериодиче
, имеющие колебательный (кривая 1), апериодиче 
 ский (кривая 2) и прямолинейный (кривая 3) характер. Оптимальным считается переходной процесс, форма которого приближается к экспоненте (кривая 2 на рис. 5.39). При этом процессе' наиболее быстро происходит компенсация больших отклонений уровня контрольного сигнала, а следовательно, и больших отклонений затуханий трактов от номинальных величин.
ский (кривая 2) и прямолинейный (кривая 3) характер. Оптимальным считается переходной процесс, форма которого приближается к экспоненте (кривая 2 на рис. 5.39). При этом процессе' наиболее быстро происходит компенсация больших отклонений уровня контрольного сигнала, а следовательно, и больших отклонений затуханий трактов от номинальных величин.
Переходной процесс, носящий колебательный характер, характеризуется величиной перерегулирования  — максимальным отклонением выходного уровня от установившегося значения
— максимальным отклонением выходного уровня от установившегося значения  . На рис. 5.39 это значение принято равным нулю. В любых случаях величина перерегулирования должна быть меньше начального отклонения, т. е.
. На рис. 5.39 это значение принято равным нулю. В любых случаях величина перерегулирования должна быть меньше начального отклонения, т. е. 
Другим важным параметром переходного процесса является время регулирования  , время от начала процесса до момента, после которого отклонение
, время от начала процесса до момента, после которого отклонение  от
от  не превысит некоторой достаточно малой величины
не превысит некоторой достаточно малой величины  . Обычно принимают
. Обычно принимают  Время регулирования не превышает нескольких минут или нескольких десятков минут.
Время регулирования не превышает нескольких минут или нескольких десятков минут.
В устройствах П-АРУ должна предусматриваться возможность их блокирования, т. е. фиксации положения регуляторов при резком снижении или пропадании контрольного сигнала. В противном случае случайное выключение контрольного сигнала приведет к предельному снижению остаточного затухания тракта и, как следствие, к резкому возрастанию помех в тракте и в трактах систем передачи, работающих на параллельных цепях. Блокирование регуляторов осуществляется специально предусматриваемыми устройствами. Например, в устройствах статического типа в настоящее время используется схема из реле с замкнутым контактом в нормальном состоянии, включаемым между точками 1—2 (см. рис. 5.35,6) и конденсатором, который подключается параллельно высокоомному входу УПТ. В обмотку реле подается ток, пропорциональный напряжению контрольного сигнала  Если контрольный сигнал уменьшается, контакт реле размыкается и на выходе УПТ ток будет определяться напряжением, которое зафиксировано на конденсаторе. При использовании во входном каскаде УПТ полевого транзистора достаточно просто обеспечить необходимо малое изменение напряжения на конденсаторе в течение нескольких часов, т. е. на время, существенно превышающее время восстановления контрольного сигнала.
Если контрольный сигнал уменьшается, контакт реле размыкается и на выходе УПТ ток будет определяться напряжением, которое зафиксировано на конденсаторе. При использовании во входном каскаде УПТ полевого транзистора достаточно просто обеспечить необходимо малое изменение напряжения на конденсаторе в течение нескольких часов, т. е. на время, существенно превышающее время восстановления контрольного сигнала.
В устройствах с магнитоэлектрическими регуляторами блокирование осуществляется фиксацией подвижной системы с помощью специального электромагнита, ток в обмотку которого подается через нормально разомкнутый контакт реле, управляемое, как и в предыдущем случае, напряжением контрольного сигнала.
В заключение заметим, что все рассмотренные устройства АРУ являются аналоговыми, осуществляющими непрерывное преобразование возмущения или отклонения контролируемого сигнала или параметра в воздействие на объект управления, например, в изменение тока подогрева термистора, включенного в ПАК.
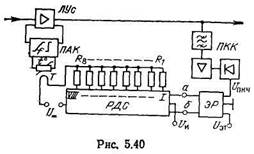 |
Иногда ввиду конструктивных особенностей собственно регулирующего устройства или недостаточной чувствительности в петлю регулирования вводят дифференциальное реле. Если при этом используют регулятор непрерывного действия, устройство АРУ называют релейным. В настоящее время начинают получать распространение устройства АРУ релейно-импульсного типа, т. е. такие, в цепь регулирования которых введено дифференциальное реле и применен регулятор импульсного (дискретного) типа. На рис. 5.40 показана одна из схем устройств АРУ релейно-импульсного типа. На входы электронного реле поступают напряжения от ПКК ( ) и эталонное (
) и эталонное ( ). Если
). Если  =
= 
 , то напряжение на выходах ЭР отсутствует. Оно будет появляться на выходе б или а, если
, то напряжение на выходах ЭР отсутствует. Оно будет появляться на выходе б или а, если  становится соответственно больше или меньше
становится соответственно больше или меньше  на небольшую величину
на небольшую величину  , характеризующую зону нечувствительности ЭР. Выходы ЭР подключены к 8-разрядлому реверсивному двоичному счетчику РДС импульсной последовательности
, характеризующую зону нечувствительности ЭР. Выходы ЭР подключены к 8-разрядлому реверсивному двоичному счетчику РДС импульсной последовательности  . Выходы счетчика включены в цепь подогрева термистора Т. Сопротивления резисторов
. Выходы счетчика включены в цепь подогрева термистора Т. Сопротивления резисторов  выбираются существенно больше сопротивления подогрева термистора и отвечают соотношению
выбираются существенно больше сопротивления подогрева термистора и отвечают соотношению  , где
, где  — номер разряда счетчика.
— номер разряда счетчика.
Если  отличается от
отличается от  , счетчик приходит в действие и осуществляет последовательное переключение комбинаций резисторов
, счетчик приходит в действие и осуществляет последовательное переключение комбинаций резисторов  и, следовательно, ступенчатое изменение тока подогрева термистора. Это будет продолжаться до тех пор, пока на выходе ПКК не установится номинальное напряжение
и, следовательно, ступенчатое изменение тока подогрева термистора. Это будет продолжаться до тех пор, пока на выходе ПКК не установится номинальное напряжение  Тогда ЭР займет нейтральное положение, а счетчик остановится, поддерживая необходимый ток подогрева термистора. Восьмиразрядный РДС позволяет получить изменение тока подогрева от
Тогда ЭР займет нейтральное положение, а счетчик остановится, поддерживая необходимый ток подогрева термистора. Восьмиразрядный РДС позволяет получить изменение тока подогрева от  до
до  ступенями, равными
ступенями, равными  , что обеспечивает практически плавное изменение усиления регулируемого усилителя ЛУс. Очевидно, что регулятор данного типа является интегральным. Применение ЭР и РДС делает возможным его выполнение на интегральных микросхемах, что позволяет обеспечить весьма высокие его технико-экономические показатели.
, что обеспечивает практически плавное изменение усиления регулируемого усилителя ЛУс. Очевидно, что регулятор данного типа является интегральным. Применение ЭР и РДС делает возможным его выполнение на интегральных микросхемах, что позволяет обеспечить весьма высокие его технико-экономические показатели.
Литература:
Осн. 1. [ 376-403 ]
Доп. 1. [ 271-286 ]
Контрольные вопросы
- Устройства АРУ, управляемые контрольным сигналом.
- АРУ с использованием МРУ.
- Принцип действия системы АРУ на мемисторах.
- Особенности разновидностей системы АРУ на терморезисторах.
- Основные характеристики систем АРУ релейного типа.
Лекция 13.  УСИЛИТЕЛИ.
УСИЛИТЕЛИ.
1. Индивидуальные усилители.
2. Групповые усилители.
3. Вспомогательные усилители.
4. Технические требования к усилителям.
Усилители являются неотъемлемой частью оконечной и промежуточной аппаратуры систем многоканальной электросвязи и в соответствии с назначением подразделяются на индивидуальные, групповые и вспомогательные.
Индивидуальные усилители предназначены для усиления сигналов отдельных каналов связи. Характерной особенностью индивидуальных усилителей является то, что они, как правило, рассчитаны на усиление сигналов в сравнительно узком диапазоне частот, определяемом эффективно передаваемой полосой частот канала.
Групповые усилители служат для одновременного усиления многих независимых сигналов и применяются как в промежуточной, так и в общей частях оконечной аппаратуры многоканальных систем. Ширина рабочей полосы, на которую должны быть рассчитаны такие усилители, определяется числом каналов, способом их объединения и назначением многоканальной системы связи.
Вспомогательные усилители предназначаются для усиления несущих, контрольных и вызывных токов. Как правило, такие усилители рассчитываются на усиление мощности одночастотных сигналов и являются узкополосными (резонансными).

