 2015-02-27
2015-02-27 979
979Исследование ленточного элеватора
Цель работы: Изучить конструкцию элеватора, ознакомиться с возможными вариантами загрузки и разгрузки транспортируемых материалов.
Задание студента:
1. Составить принципиальную схему элеватора и указать его составные части (см рис.1)
2. Определить тип элеватора по расположению ковшей, типу тягового органа способу загрузки транспортируемого материала.
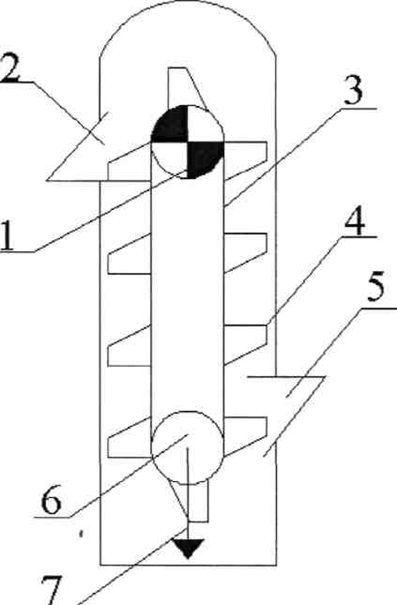
Рис. 1
1. Приводной барабан;
2. Разгрузочное устройство;
3. Лента;
4. Ковш;
5. Загрузочное устройство;
6. Натяжной барабан;
7. Натяжное устройство;
В качестве тягового органа используется конвейерная лента (резинотканевая — послойная ).
Ковши расставлены в определённой последовательности согласно схемы.
3. Основные теоретические положения.
Ковшовые элеваторы предназначены для вертикального и наклонного подъема зернистых и кусковых грузов. Ковши надежно крепятся на тяговом органе: ленте или цепях.
Привод элеватора производится короткозамкнутого электродвигателя, через упругую муфту, редуктор, привод оборудуется тормозом
Натяжное устройство винтовое тип Гост 2063 -82 предусматривает основные типы ковшей; глубокие, мелкие, с бортовыми направляющими.
Производительность элеватора определяется уравнением:
 (1.1)
(1.1)
где:  - производительность элеватора
- производительность элеватора  /ч
/ч
 -емкость ковша
-емкость ковша
 - ко э ффициент заполнения ковша (0.6 –0.8 )
- ко э ффициент заполнения ковша (0.6 –0.8 )
 - плотность груза
- плотность груза 
V -скорость транспортировки груза  /с
/с
 –шаг установки ковшей м
–шаг установки ковшей м
Загрузка ковшей производится зачерпыванием (мелкозернистые, неабразивные грузы, быстроходные элеваторы) или засыпанием грузов ковши (абразивные кусковые грузы, тихоходные элеваторы).
Разгрузка - центробежная(V= 1-4  /с)
/с)
Самотечная (гравитационная) разгрузка применяется на тихоходных элеваторах (V= 0.4-0.5 /с) груз под действием силы тяжести высыпается из ковша на заднюю стенку впереди идущего ковша и по ней ссыпается в разгрузочный патрубок.
На восходящей ветке элеватора ковш движется равномерно и прямолинейно.
Груз находится под воздействием силы тяжести:
G=  (1.2)
(1.2)
где: m– масса груза т.
 - ускорение свободного падения
- ускорение свободного падения 
На барабане ковш начинает поворот, и на груз действует центробежная сила:
 (1.3)
(1.3)
где: V- скорость движения центра тяжести груза /с
R- радиус вращения м.
m– масса груза т.
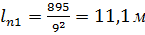
Равнодействующая центробежной силы и силы тяжести груза меняется по интервалам, но точка В пересечение продолжения вектора R с вертикальной осью, проходящей через центр барабана, остается неизменной и называется полюсом.
Расстояние  от точки. В до центра барабана называется полюсным расстоянием.
от точки. В до центра барабана называется полюсным расстоянием.
Величину полюсного расстояния можно вычислить по подобию треугольников
ABO и AFRсм. рис 1.3(а, б).
 (1.4)
(1.4)
Откуда:  (1.5)
(1.5)
Подставив значение
V=  (1.6)
(1.6)
где  – частота вращения приводного вала в минуту, получим
– частота вращения приводного вала в минуту, получим
 (1.7)
(1.7)
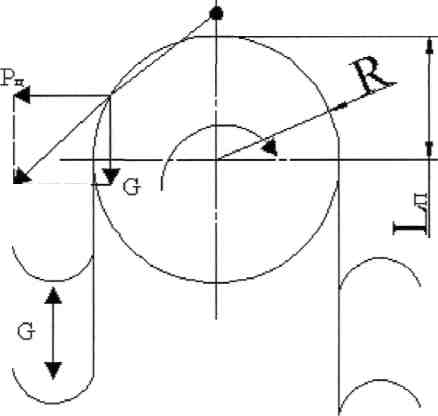
Полюс элеватора (Рис 1.2)
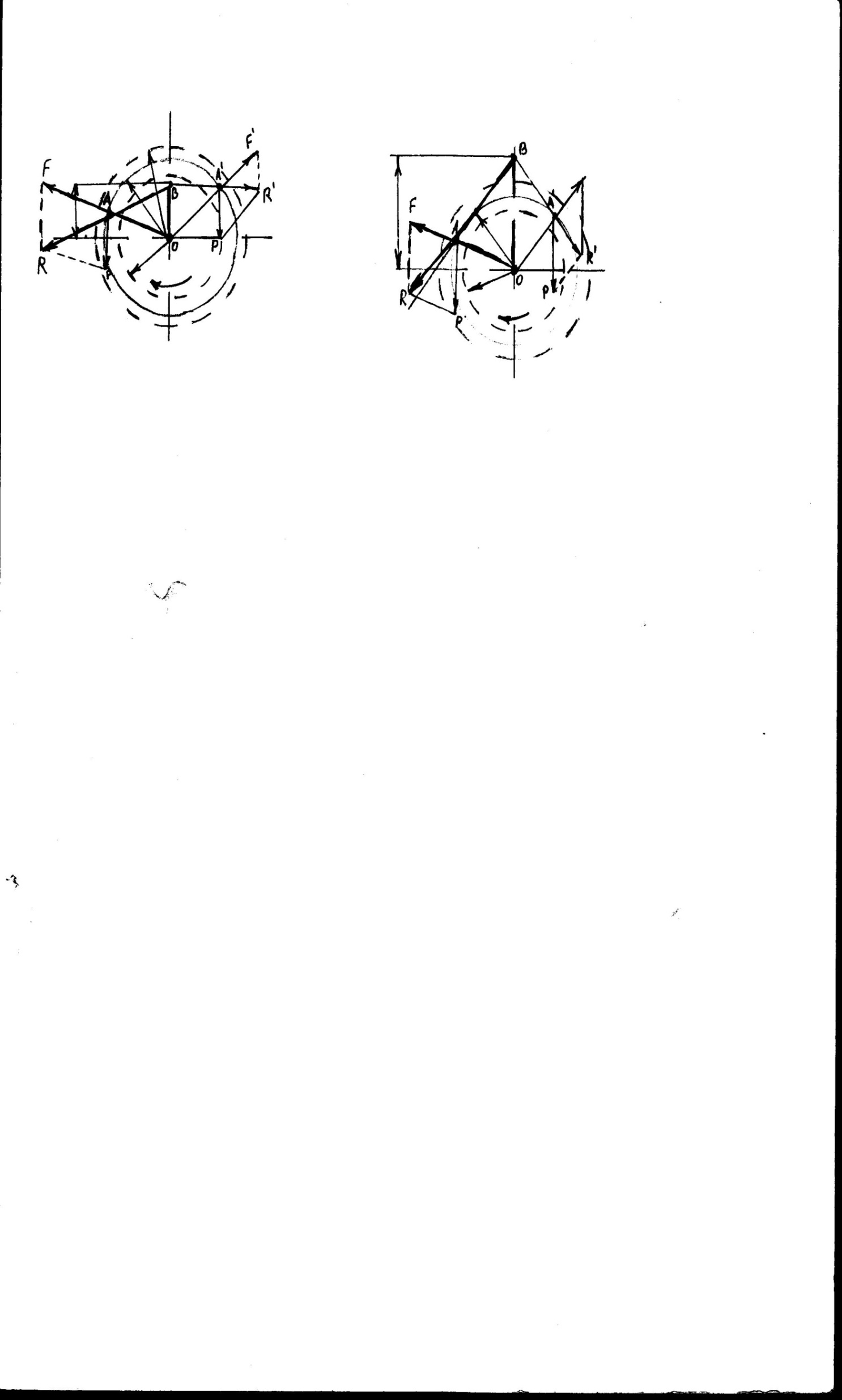
а) б)
Определения величины полюсного расстояния (Рис 1.3)
Если полюсное расстояние меньше радиуса приводного барабана разгрузки Lп<R, то разгрузка - центробежная.
Когда полюсное расстояние превышает радиус барабана LП>R, то разгрузка гравитационная.
4. Измерить:
· диаметр приводного барабана Dб по центрам ковшей;
· частоту вращения приводного барабана для 4-х вариантов работы элеватора nб.
Таблица 1 Технические параметры элеватора.
| № опыта | ||||
| Частота вращения барабана (пб, об/мин) | 18,5 | |||
| (Пб, об/сек) | 0,15 | 0,31 | 0,38 | 0,46 |
| Линейная скорость ковша (γ Vк, м/с) | 0,11 | 0,23 | 0,29 | 0,35 |
| Полюсное расстояние (Lп, м) | 11,1 | 2,6 | 1,7 | 1,1 |
Линейная скорость ковша 
1. 
2. 
3. 
4. 
Полюсное расстояние: 
1. 
2. 
3. 
4. 
5. Содержание отчета:
1. Название, краткое изложение цели и содержания работы.
2. Схема элеватора.
3. Определение фактической и расчетной производительности элеватора с данными, сведенными в таблицу1.
4. Определение способа разгрузки.
5. Схемы приводного барабана с положением полюса.








