2015-02-04
2015-02-04 781
781Для специалистов в области ЭМС наиболее удобно и традиционно графическое описание моделей в виде структурных схем.
Если фрагменты математического описания разделить на блоки в соответствии с физическими процессами, протекающими в системе, определить входные и выходные координаты и внутренние параметры каждого блока и изобразить схему взаимодействия блоков, то получим структурную модель математического уровня (СММУ). Таким образом, можно утверждать, что «кирпичиками», из которых конструируется СММУ, являются динамические элементы. В общем случае динамический элемент представляется в виде блока, осуществляющего преобразования входных воздействий в выходной сигнал элементов в соответствии с заданной функцией.
Многообразие указанных функций предопределяет необходимость разделения динамических элементов на классы. Укажем наиболее используемые классы динамических элементов.
Элементы задания внешних воздействий (класс V) предназначены для формирования внешних ступенчатых воздействий. Элемент характеризуется величиной ступенчатого сигнала А и временем его приложения τ. Выходной сигнал элемента определяется в каждый момент времени как
 (2.1)
(2.1)
Графически элемент изображается в виде прямоугольника с одним выходом (рис. 2.2.)
Для получения более сложных форм внешних воздействий необходимо использовать комбинации элементов возмущения с динамическими элементами других классов.
Линейный безынерционный элемент (класс U) характеризуется коэффициентом передачи KU. В каждый момент времени значение выходного сигнала формируется как
 , (2.2)
, (2.2)
где  – значение входного сигнала элемента,
– значение входного сигнала элемента,  - значение коэффициента передачи.
- значение коэффициента передачи.
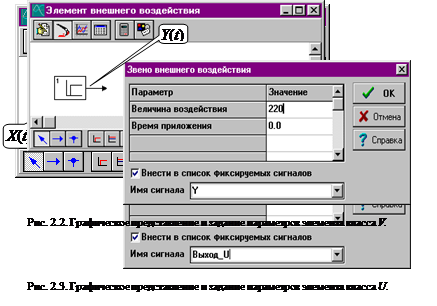
Графическое представление элемента класса U приведено на рис. 2.3.
Линейные инерционные элементы (класс L) реализуют линейное преобразование входного сигнала в выходной в соответствии с передаточной функцией
 (2.3)
(2.3)
что соответствует дифференциальному уравнению n - порядка
 (2.4)
(2.4)
при нулевых начальных условиях.
В каждый момент времени значение выходного сигнала формируется в результате численного интегрирования дифференциального уравнения (2.4)
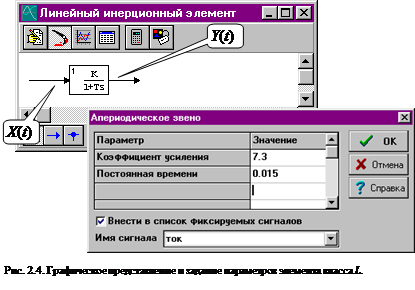 |
Графическое представление элемента класса L приведено на рис. 2.4.
С использованием элементов перечисленных выше трех классов могут быть построены структурные модели математического уровня линейных электромеханических систем. Так, например, модель для изучения динамических процессов пуска и останова электродвигателя постоянного тока независимого возбуждения при постоянном магнитном потоке (Ф=const) имеет вид, приведенный на рис. 2.5.
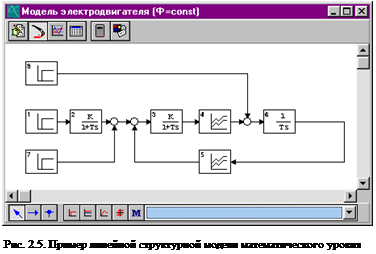
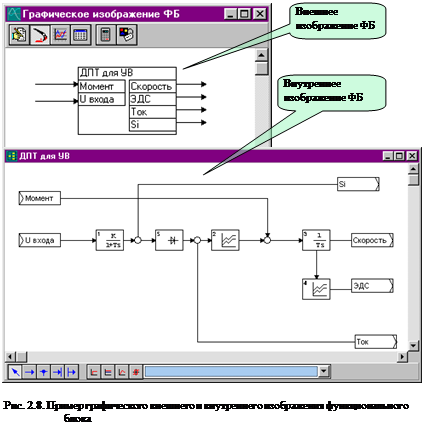
Здесь электромеханические процессы преобразования энергии описаны следующей системой линейных дифференциальных уравнений:
Входное напряжение электродвигателя U нарастает по экспоненциальному закону и мгновенно отключается при достижении модельного времени значения t =1.5
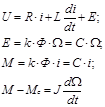
Нелинейные функциональные элементы ( класс N) осуществляют нелинейные и логические преобразования входных сигналов в выходные.
В общем случае с помощью нелинейных элементов осуществляется операция
 , (2.5)
, (2.5)
где –  - выходной сигнал элемента,
- выходной сигнал элемента,  - вектор входных сигналов.
- вектор входных сигналов.  – вектор параметров, t - время.
– вектор параметров, t - время.
Примеры графического представления нелинейных функциональных элементов приведены на рис. 2.6.
Используя отдельные нелинейные элементы, приведенная на рис. 2.5 структурная модель может быть перестроена для изучения динамических процессов в двигателе постоянного тока при изменении магнитного потока (Ф=var) и линейном нарастании входного напряжения U до заданного уровня.(рис. 2.7).
Базовый состав функциональных элементов структурных моделей математического уровня приведен в приложении 1.
Структурная модель конкретной электромеханической системы конструируется из базовых элементов путем объединения точек входа и выхода и введения узлов алгебраического суммирования сигналов. Исходной информацией для построения структурных моделей математического уровня могут быть математическое описание динамических процессов в форме дифференциальных уравнений или структурная схема исследуемой системы.
С появлением средств графического взаимодействия отпала необходимость в разработке, изучении и использовании специализированных языков моделирования.
 |
К настоящему времени практически все системы моделирования имеют интерфейсные средства, позволяющие пользователю быстро и удобно нарисовать структурную модель для дальнейшей постановки имитационных экспериментов.
Структурные модели математического уровня (СММУ), построенные для реальных электромеханических систем отличаются наличием большого числа функциональных элементов, многообразием межэлементных связей. Поэтому такие модели слабо отражают физические и схемотехнические свойства исследуемых объектов. Для специалистов в области электромеханических систем наиболее удобным является представление моделей в виде схем, максимально приближенным к так называемым функциональным схемам, в которых указаны все виды соединения и взаимодействия реальных физических элементов. Указанным требованиям отвечают структурные модели функционального уровня (СМФУ).
Основными элементами такой модели являются:
· элементы построения структурных моделей математического уровня (СММУ) всех перечисленных выше классов;
· функциональные блоки (ФБ).
Под функциональным блоком будем понимать интегрированный элемент описания структурной модели физического звена, представленный в виде многополюсника с произвольным (в т.ч. и нулевым) числом входных и выходных каналов.
Внутри каждого функционального блока должен быть предварительно “зашит” один из многочисленных вариантов структурной модели соответствующего физического элемента. Таким образом, внутреннее описание функционального блока представляет собой схему соединения базовых элементов СММУ и функциональных блоков, выполняющую некоторое функционально законченное преобразование координат модели.
Внешне функциональный блок представляется в виде прямоугольника с определенным числом входных и выходных каналов и идентифицируется собственным оригинальным именем.
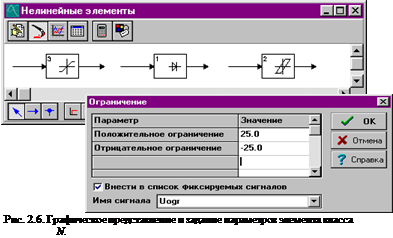
На рис 2.8. приведен пример внутреннего и внешнего изображения функционального блока, в качестве которого выбрана модель электродвигателя постоянного тока с разомкнутой обратной связью по ЭДС.
Внутреннее изображение нового ФБ конструируется практически также как и СММУ, дополнительно здесь изображаются и идентифицируются входные и выходные каналы, и вводятся идентификаторы формальных параметров.
Структурная модель функционального уровня конкретной электромеханической системы конструируется и базовых элементов СММУ и ФБ. Следует отметить, что на каждый входной канал ФБ может быть подан сигнал только с выхода элемента или ФБ, сигнал с узла суммирования на вход ФБ подавать нельзя. Конкретные значения параметров ФБ задаются при построении СМФУ.