 2015-02-04
2015-02-04 1985
1985Характеризуется затратами на сооружение и эксплуатацию ЭП.
Экономически выгодным является такой ЭП, который обеспечивает большую производительность при высоком качестве технологического процесса и сравнительно быстро окупается. Оценками экономичности являются КПД и cosφ.
При работе двигателя на разных скоростях рассчитывать средневзвешенный КПД и cosφ.

 - полезная мощность на валу ЭД
- полезная мощность на валу ЭД
 - потери
- потери
 , где
, где  ,
,  ,
,  - соответственно полезная мощность, потери мощности и время работы ЭП на i-ступени регулирования
- соответственно полезная мощность, потери мощности и время работы ЭП на i-ступени регулирования
 , где
, где  ,
,  - активная и реактивная мощности на i-ступени
- активная и реактивная мощности на i-ступени
Допустимая нагрузка двигателя соответствует такому моменту нагрузки, при котором нагрев двигателя не превосходит допустимого нормативного значения. При работе двигателя на естественной характеристике такой нагрузкой является номинальный момент двигателя, при котором по нему протекает номинальный ток и его нагрев равен нормативному.
10. Общие принципы построения систем управления электроприводами
Регулирование координат ЭП, которое осуществляется в целях управления движением ИО, реализуется воздействием на ЭД с помощью системы управления. СУ можно разделить на неавтоматизированные и автоматизированные.
Автоматизированные делятся на:
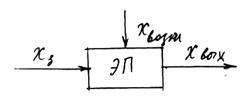
- разомкнутые (системы, в которых изменение внешних возмущений отражается на выходной величине)
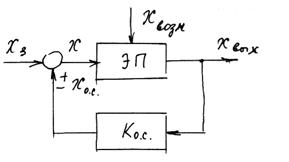
- замкнутые (в них влияние возмущающего воздействия на выходную координату частично или полностью устраняется)
Разомкнутая система:
Система с обратной связью:
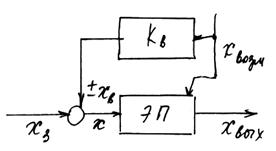
Система с обратной связью и частичной компенсацией возмущающего воздействия:
Комбинированная система:
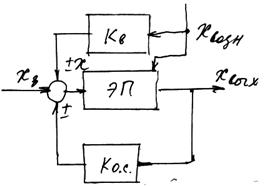
Системы с обратной связью – системы, работающие по принципу отклонения. Они являются основным видом замкнутых систем автоматизированного ЭП.
Их характерным признаком является наличие сигнала рассогласования или отклонения  , который является входным управляющим сигналом ЭП.
, который является входным управляющим сигналом ЭП.
Системы с величиной рассогласования = 0 называются астатическими.
Системы с величиной x ≠ 0 называются статическими.
Все обратные связи можно разделить на:
- положительные
- отрицательные
- жёсткие
- гибкие
- линейные
- нелинейные
Жёсткая обратная связь характеризуется тем, что её сигнал действует как в установившемся, так и в переходных режимах, и служит для формирования только динамических характеристик ЭП.
Линейной называется обратная связь, которая математически описывается линейными уравнениями. Все остальные связи являются нелинейными.
При регулировании 2 и более координат ЭП используется 3 основных структурных схемы:
1) схема с общим суммирующим усилителем
-: невозможность регулирования координат независимо друг от друга, трудность достижения оптимального регулирования
+: простота
2) схема с общим усилителем и нелинейными обратными связями
-: невозможность достижения независимой настройки всех координат ЭП
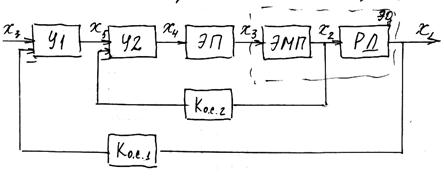
3) схема с подчинённым регулированием координат
Отличительной особенностью данной схемы является равенство количества усилителей разомкнутых контуров к числу регулируемых координат. В этой схеме замкнутые контуры располагаются таким образом, что выходной сигнал внешнего контура является задающим входным сигналом внутреннего контура. Т.е. каждый внутренний контур подчинён внешнему.
Система с подчинённым регулированием:
11. Механические характеристики и регулирование скорости электроприводов с двигателями постоянного тока независимого возбуждения
Принципиальная схема ДПТНВ:
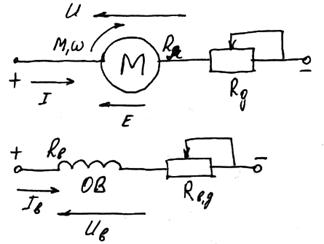
Анализ работы двигателя проведён в предположении, что якорная цепь питается от идеального источника напряжения, параметры данной цепи постоянны, магнитный поток не зависит от нагрузки (реакция якоря не проявляется).
В основе работы ЭД лежат 3 фундаментальных закона электротехники:
1 закон:  - закон электромагнитной индукции
- закон электромагнитной индукции
2 закон:  - закон электромагнитных сил
- закон электромагнитных сил
3 закон:  - закон Кирхгофа
- закон Кирхгофа
Е – ЭДС вращения, Ф – магнитный поток, I – ток в якорной цепи, k – коэффициент, определяемый конструкцией ЭД
В системе СИ коэффициент одинаков в выражении ЭДС и в выражении моментов
 , где
, где  - число пар полюсов, N – число активных проводников обмотки якоря, а – число параллельных ветвей обмотки якоря
- число пар полюсов, N – число активных проводников обмотки якоря, а – число параллельных ветвей обмотки якоря
R – полное сопротивление якорной цепи

 - сопротивление обмотки якоря, щёток, щёточных контактов, обмоток дополнительных полюсов и компенсационной обмотки.
- сопротивление обмотки якоря, щёток, щёточных контактов, обмоток дополнительных полюсов и компенсационной обмотки.
 - уравнение электромеханической характеристики ДПТНВ (*)
- уравнение электромеханической характеристики ДПТНВ (*)
 - скоростная характеристика
- скоростная характеристика
Для получения выражения механической характеристики подставим в (*)  :
:
 - мех. харак. двигателя
- мех. харак. двигателя
В этом выражении фигурирует электромагнитный момент двигателя, который > момента на валу в двигательном режиме его работы на величину  , которая называется механическими потерями.
, которая называется механическими потерями.

 - скорость идеального ХХ
- скорость идеального ХХ
 - перепад скорости
- перепад скорости
Если скорость двигателя = 0 и он подключен к источнику напряжения, то такой режим работы называется режимом КЗ
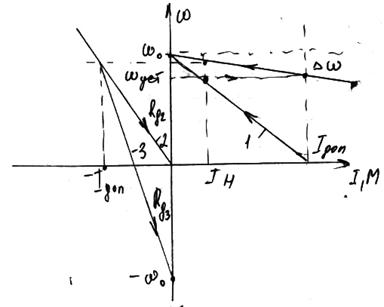
Если сохранить неизменным направление потока возбуждения, изменить полярность напряжения, приложенного к якорю, то это повлечёт за собой изменение направления тока в якоре, момента и скорости вращения двигателя.
Уравнение механической характеристики в этом случае:
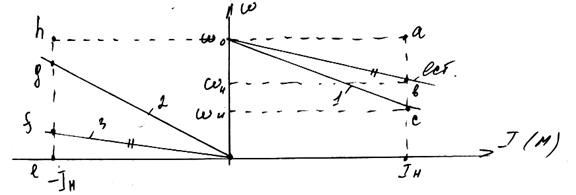
Естественные характеристики ДПТ:
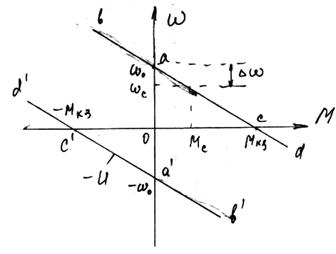
ab, a’b’ – режим рекуперативного торможения
ac, a’c’ – двигательный режим
cd, c’d’ – работа двигателя в режиме торможения противовключением
Механическая характеристика, снятая при условии, что  ,
,  ,
,  носит название естественной механической характеристики.
носит название естественной механической характеристики.
Если  ,
,  ,
,  - искусственные характеристики
- искусственные характеристики
Пример:
 = 10 кВт
= 10 кВт
 = 220 В
= 220 В
 = 52,2 А
= 52,2 А
= 0,274 Ом
 = 2250 об/мин
= 2250 об/мин
Построить естественную электромеханическую характеристику




Аналогично строится
Искусственные характеристики ДПТ для случая когда:
 ,
,  ,
, 
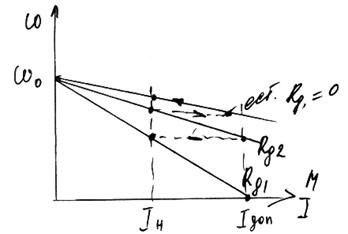
Характеристики, полученные при введении добавочных сопротивлений в якорную цепь, называются реостатными характеристиками
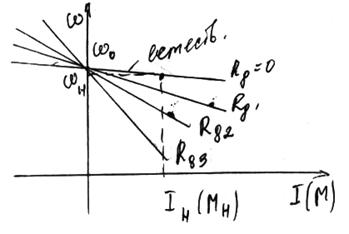

Регулирование координат ДПТ независимого возбуждения резисторами в цепи якоря

 - уравнение механической характеристики
- уравнение механической характеристики

 - подводимая электромеханическая мощность
- подводимая электромеханическая мощность
 - механическая мощность на валу
- механическая мощность на валу

Способ регулирования позволяет в широких пределах изменять скорость регулирования, обеспечивает необходимую плавность, но неэкономичен.
Расчёт регулировочных (добавочных) сопротивлений
1) Метод расчёта  по
по 
Т.к. при пуске ДПТ ток КЗ составляет  , включают пусковые добавочные сопротивления.
, включают пусковые добавочные сопротивления.
Необходимо ограничить  при пуске до значения
при пуске до значения
вводятся чтобы ток стал допустимым


Данный метод расчёта называется расчётом по допустимому току
При динамическом торможении:

При реверсе (противовключении):
Обычно используют не более 2 или 3 ступеней ускорения. В данном случае – 2.
m – количество ступеней
 - допустимый ток
- допустимый ток
 - ток переключения
- ток переключения
В данном случае 

2) Метод отрезков
 - при динамическом торможении с добавочным сопротивлением
- при динамическом торможении с добавочным сопротивлением
 - скорость на искусственной характеристике
- скорость на искусственной характеристике
3 – механическая характеристика при динамическом торможении для случая 
 , где ,
, где , 
 - относительный перепад скоростей
- относительный перепад скоростей







После этого строятся характеристики
3) Метод пропорций
 - эмпирическая формула
- эмпирическая формула
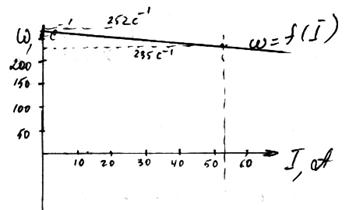
Регулирование скорости ДПТ независимого возбуждения изменением магнитного потока

Регулирование скорости данным способом возможно только вверх от основной.
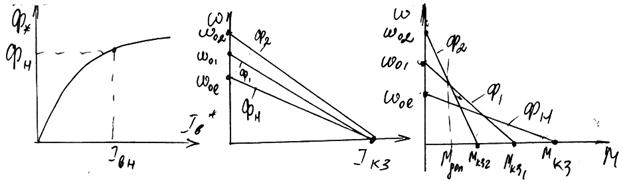


При ослаблении потока одновременно увеличивается  и наклон характеристик, т.к. не зависит от потока. Электромеханические характеристики сходятся в одной точке.
и наклон характеристик, т.к. не зависит от потока. Электромеханические характеристики сходятся в одной точке.

 зависит от потока. При ослаблении потока уменьшается. Его уменьшение ограничивается допустимым моментом
зависит от потока. При ослаблении потока уменьшается. Его уменьшение ограничивается допустимым моментом 




- полезная мощность на валу двигателя

Данным способом производится регулирование при постоянной мощности.
Регулирование координат электропривода изменением подводимого к якорю напряжения
Плавное изменение напряжения осуществляется преобразователем, имеющим внутреннее сопротивление  , ЭДС
, ЭДС  и коэффициент усиления преобразователем
и коэффициент усиления преобразователем  .
.
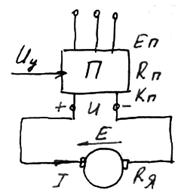

I – ток якоря

- выражение электромеханической характеристики
Подставив значение напряжения можно записать:

 - выражение механической характеристики
- выражение механической характеристики
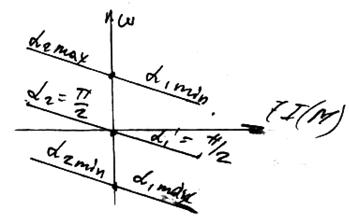
Семейство характеристик:
За счёт влияния наклон характеристик больше чем при питании от источника бесконечно большой мощности.
При = 0 характеристика проходит через начало координат, что соответствует режиму динамического торможения.
В качестве преобразователей используются электромашинные, в которых источником является генератор постоянного тока (система Г-Д), а также полупроводниковые (ТП-Д – тиристорный преобразователь-двигатель).
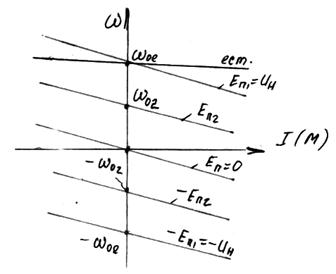
Система Г-Д:
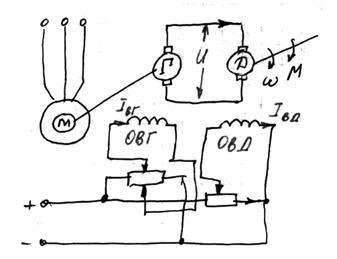
Система Г-Д обеспечивает регулирование скорости в широких пределах в 4 квадрантах и широкую плавность регулирования.
-: большая установленная мощность и низкий КПД
Управляемые полупроводниковые преобразователи бывают:
- однофазными или 3-фазными
- реверсивными или нереверсивными
- собранными по нулевой или мостовой схемам
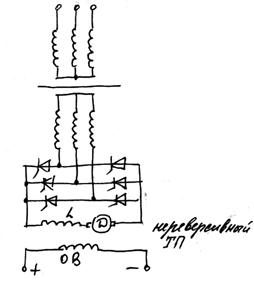
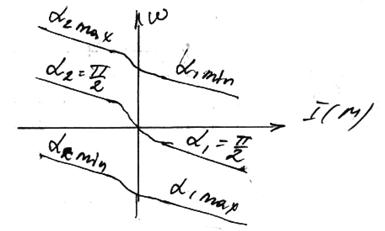
Схема однофазного тиристорного преобразователя 2-полупериодного выпрямления (нулевая схема):
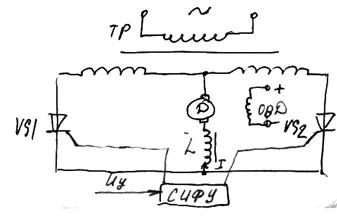
СИФУ – система импульсно-фазового управления
Регулирование направления на двигателе осуществляется за счёт изменения сигнала управления 
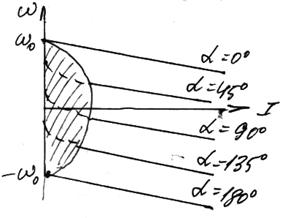
Если подан сигнал управления при угле  , т.е. в момент естественного открытия тиристора, то в этом случае ЭДС будет наибольшая.
, т.е. в момент естественного открытия тиристора, то в этом случае ЭДС будет наибольшая.
Если подан сигнал со сдвигом  , то получаем
, то получаем  , что соответствует режиму динамического торможения.
, что соответствует режиму динамического торможения.
Если  , то
, то  наибольшая.
наибольшая.
Регулируя угол управления  в широких пределах регулируется напряжение.
в широких пределах регулируется напряжение.
 (для нереверсивного преобразователя)
(для нереверсивного преобразователя)
m – число фаз
Только при малых токах характеристики нелинейны

-: большие пульсации тока
При мостовой схеме пульсации значительно ниже.
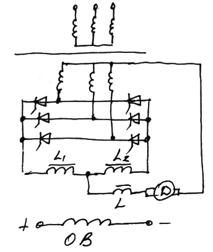
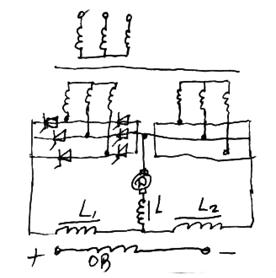
Мостовая схема выпрямления (схема Ларионова):
Чтобы обеспечить работу ЭД в 4 квадрантах при нереверсивном преобразователе, нужно изменять направление тока возбуждения в нереверсивных преобразователях. В реверсивных схемах преобразователей этого не требуется.
Сигналы управления могут подаваться одновременно на все тиристоры или раздельно.
Схема реверсивного тиристорного преобразователя (перекрёстная схема):
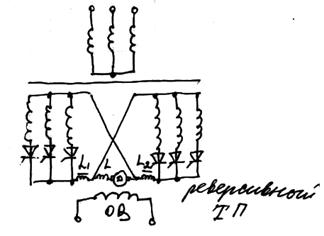
Встречно-параллельная схема с нулевым выводом:
В данных схемах используется линейное согласование углов управления.
При задании  характеристики нелинейные.
характеристики нелинейные.
При нелинейном согласовании углов :
Наименьшие пульсации даёт перекрёстная мостовая схема:
12. Механические характеристики и регулирование скорости электроприводов с асинхронными двигателями (АД)
Схема включения 3-фазного АД (с фазным ротором):
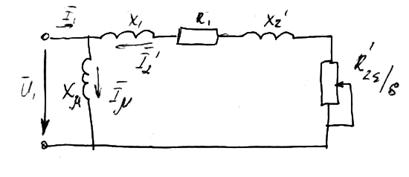
Для исследования электромеханических и механических характеристик АД используется упрощённая схема замещения для одной фазы двигателя:

 - скольжение
- скольжение

f – частота питающей сети
- число пар полюсов
n – номинальная скорость вращения ротора
 ,
,  ,
,  ,
,  …
…
 ,
,  ,
,  ,
,  …
…
Стандартный ряд синхронных скоростей вращения поля.
У АД скорость вращения ротора отстаёт от скорости вращения поля:
 об/мин
об/мин
об/мин
Если известно можно определить  по формуле:
по формуле:


 - приведённое сопротивление вторичной обмотки ротора к первичной
- приведённое сопротивление вторичной обмотки ротора к первичной
 - коэффициент трансформации по ЭДС (обычно приводится в каталогах)
- коэффициент трансформации по ЭДС (обычно приводится в каталогах)

 - линейное первичное напряжение, подаваемое на статор
- линейное первичное напряжение, подаваемое на статор
 - номинальная ЭДС на разомкнутых кольцах неподвижного ротора
- номинальная ЭДС на разомкнутых кольцах неподвижного ротора


 - индуктивное сопротивление намагничивающей цепи двигателя
- индуктивное сопротивление намагничивающей цепи двигателя
 - ток намагничивания
- ток намагничивания
 - фазное напряжение
- фазное напряжение
Это принято для упрощения, в реальных схемах не так.
 - приведённый ток ротора
- приведённый ток ротора
 - уравнение электромеханической характеристики АД или зависимость
- уравнение электромеханической характеристики АД или зависимость 
 - индуктивное фазное сопротивление короткого замыкания
- индуктивное фазное сопротивление короткого замыкания

 - второе выражение электромеханической характеристики АД
- второе выражение электромеханической характеристики АД
При увеличении S ток растёт и приближается к предельному значению
При отрицательных скольжениях (генераторный режим) вторичный ток изменяется от 0 до максимального значения
 при
при 
Электромеханической характеристикой также является  или
или 
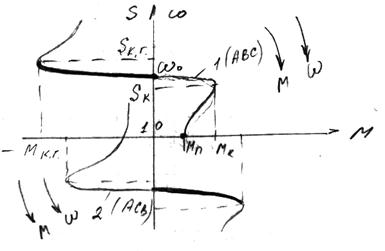
Электромеханические характеристики АД:
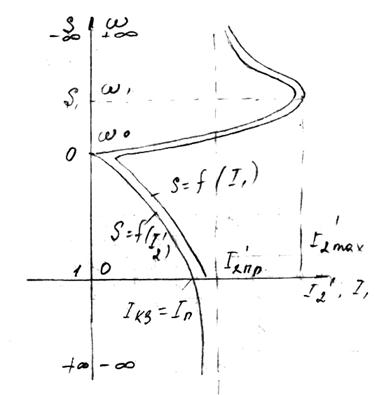
 - пусковой ток
- пусковой ток


Характерные точки:
1) S = 0,  ,
,  ,
,  - точка идеального ХХ
- точка идеального ХХ
2) S = 1,  ,
,  - точка КЗ
- точка КЗ
3)  ,
,  ,
,  - точка максимального значения тока ротора, лежащая в области отрицательных скольжений
- точка максимального значения тока ротора, лежащая в области отрицательных скольжений
4)  ,
,  ,
,  - асимптотическое значении тока ротора при бесконечно большом значении скольжения и скорости
- асимптотическое значении тока ротора при бесконечно большом значении скольжения и скорости
Выражение для механической характеристики АД можно получить, рассмотрев баланс мощности в цепи ротора:

 - электромагнитная мощность
- электромагнитная мощность
 - полезная механическая мощность
- полезная механическая мощность
 - потери скольжения
- потери скольжения

(*)  - механическая характеристика АД,
- механическая характеристика АД,  или
или
Эта характеристика имеет 2 максимума:
 - критическое значение
- критическое значение
(+) – двигательный режим
(-) – генераторный режим
Формулу Клосса используют вместо (*) чаще для построения и расчёта механической характеристики АД:
 - формула Клосса
- формула Клосса

Если  то формула Клосса упрощается и по ней можно построить естественную характеристику АД:
то формула Клосса упрощается и по ней можно построить естественную характеристику АД:
- синхронная скорость вращающегося магнитного поля

Характерные точки:
1) S = 0, , М = 0 - точка идеального ХХ
2) S = 1, ,  - точка КЗ
- точка КЗ
3)  ,
,  ,
,  ,
,  - точка максимумов
- точка максимумов
4) , ,  - асимптотические значения
- асимптотические значения
Асимптотой механической характеристики является ось скорости.
 если учитывается
если учитывается  - сопротивление статорной цепи
- сопротивление статорной цепи
 - если в справочнике на дано
- если в справочнике на дано  , то его можно вычислить
, то его можно вычислить
Момент АД можно определить по формуле:

В пусковой области пропорциональность между током и моментом нарушается из-за значительного снижения коэффициента мощности роторной цепи при пуске.
 - из этого выражения следует, что при
- из этого выражения следует, что при  поток в машине постоянен.
поток в машине постоянен.
Коэффициент мощности АД и способы его повышения
 , где S – полная кажущаяся мощность,
, где S – полная кажущаяся мощность,  - активная мощность
- активная мощность
 -
- 

АД на каждый кВт активной мощности потребляет из сети (0,5-0,75) кВт реактивной мощности.
Чем ниже  АД, тем большую реактивную мощность он потребляет и тем больше он загружает её дополнительным током, вызывая дополнительные потери.
АД, тем большую реактивную мощность он потребляет и тем больше он загружает её дополнительным током, вызывая дополнительные потери.
Способы повышения АД:
1) Замена мало загруженных АД двигателями меньшей мощности
2) Ограничение времени работы АД на ХХ
3) Понижение напряжения питания АД, работающих с малой нагрузкой
4) Замена АД синхронными ЭД в тех случаях, когда это возможно по условиям технологического процесса
Регулирование скорости вращения АД (искусственные характеристики АД)
Зная выражение для угловой скорости вращения АД можно узнать возможные способы регулирования его скорости
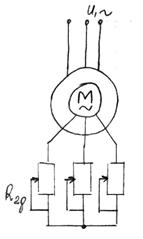
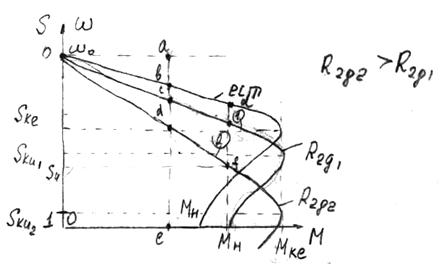
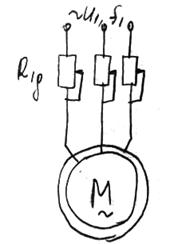
1) Регулирование введением добавочного активного сопротивления в роторную цепь
Схема включения АД:
 - при изменении
- при изменении  в роторной цепи скольжение будет изменяться (увеличиваться)
в роторной цепи скольжение будет изменяться (увеличиваться)
-  остаётся постоянным
остаётся постоянным
Расчёт резисторов в цепи ротора
Этот расчёт может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики
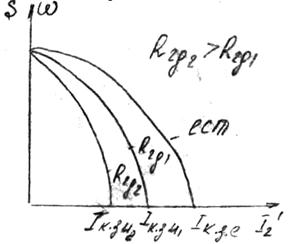
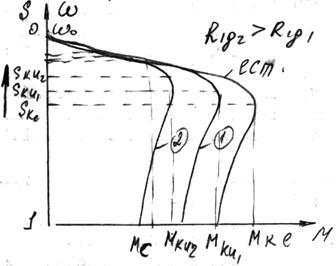
1) Если характеристика задана полностью как характеристика 1 на рисунке
 , где - активное сопротивлении фазы ротора
, где - активное сопротивлении фазы ротора
Данная формула справедлива не только для критического момента, но и для любого фиксированного момента 
 , где
, где  - скольжение АД на естественной характеристике, соответствующее моменту .
- скольжение АД на естественной характеристике, соответствующее моменту .
2) Если задана характеристика только рабочей частью, можно использовать метод отрезков


 - ЭДС ротора при скольжении S = 1
- ЭДС ротора при скольжении S = 1
 - значение тока ротора
- значение тока ротора
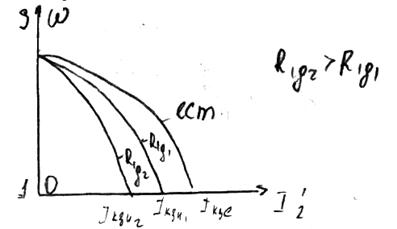
Электромеханические характеристики при изменении в роторной цепи будут выглядеть следующим образом:
2) Регулирование скорости с помощью введения добавочного сопротивления в статорную цепь 

Данный способ регулирования применяется очень редко в связи с низкой экономичностью и малой пригодностью для регулирования скорости. Этот способ обычно применяется для ограничения токов и моментов для двигателя с КЗ-ротором в различных переходных процессах.
В некоторых ЭП ограничение токов и моментов осуществляется включением  только в одну из фаз, что позволяет получить тот же эффект уменьшения тока и момента при меньшем числе резисторов.
только в одну из фаз, что позволяет получить тот же эффект уменьшения тока и момента при меньшем числе резисторов.
Электромеханические характеристики при включении :
Искусственные механические характеристики АД при несимметричных сопротивлениях в цепи ротора и статора
1) Введение несимметричного сопротивления в цепь ротора
Неравные сопротивления в цепи ротора создают в фазах несимметричные токи, которые создают прямую и обратную МДС, вращающуюся по направлению и против направления вращения ротора.
Результирующая механическая характеристика получается с характерным провалом, и он тем больше, чем больше несимметричность включенных в ротор сопротивлений.
2) Включение несимметричного добавочного сопротивления в цепь статора
Включение добавочного резистора в цепь статора приводит к несимметричности напряжения на зажимах статора, что вызывает уменьшение пускового момента и момента вращения, а также незначительное изменение магнитного поля.
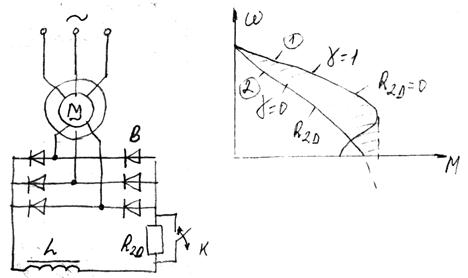
Импульсное регулирование скорости асинхронных электроприводов
Для импульсного регулирования активного сопротивления в статорной цепи параллельно сопротивлениям включаются контакты управляемого ключа K, работающего с изменяемой скважностью.
0 ≤ γ ≤ 1
При γ = 1 двигатель будет работать на естественной характеристике, ключ К замкнут постоянно.
При γ = 0 двигатель будет работать на реостатной характеристике с полностью введённым добавочным сопротивлением , ключ К разомкнут.
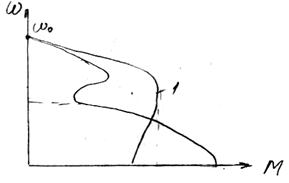
Допустимый момент АД при снижении скорости резко падает из-за возрастания потерь в ЭД.

При увеличении М увеличивается
Сопротивление в роторной цепи также можно регулировать импульсными методами. В этом случае дополнительные потери, обусловленные регулированием скорости, выделяются в добавочных резисторах роторной цепи, поэтому допустимый момент АД примерно равен номинальному.
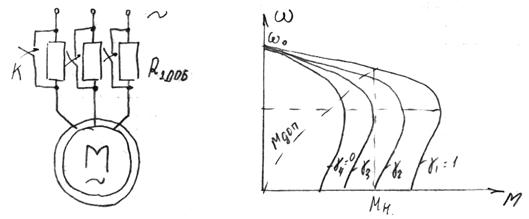
Одна из схем импульсного регулирования добавочного сопротивления в роторной цепи:
При γ = 1 двигатель будет работать на характеристике, близкой к естественной, ключ К замкнут.
При γ = 0 в ротор вводится  , двигатель будет работать на реостатной характеристике, ключ К разомкнут.
, двигатель будет работать на реостатной характеристике, ключ К разомкнут.
0 ≤ γ ≤ 1
 - скважность
- скважность
 - период коммутации
- период коммутации
Энергетические показатели при импульсном регулировании сопротивления несколько хуже, чем при ступенчатом регулировании, что обусловлено пульсациями выпрямленного тока.
+: простота, плавность регулирования в широких пределах, высокое быстродействие, высокая точность регулирования
-: уменьшение модуля жёсткости и стабильности угловой скорости при введении добавочного сопротивления.
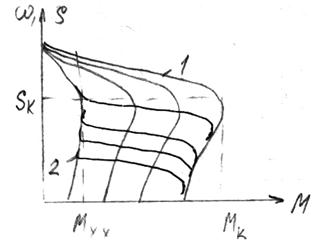
Чтобы устранить эти недостатки применяется замкнутая система импульсного регулирования скорости в роторной цепи
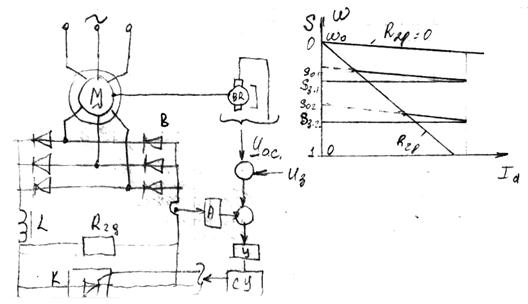
 соответствует задающему скольжению в замкнутой системе
соответствует задающему скольжению в замкнутой системе
 - скольжение, соответствующее равенству выпрямленного тока (
- скольжение, соответствующее равенству выпрямленного тока ( )
)
Регулирование скорости АД изменением подводимого напряжения
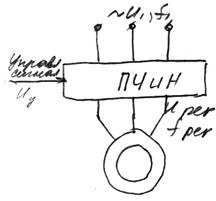
Схема изменения подводимого к статору напряжения
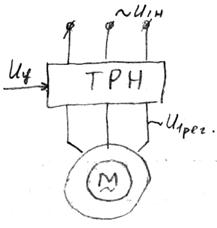
Между сетью и статором ЭД включен тиристорный регулятор напряжения (ТРН), выходное напряжение которого регулируется маломощным внешним сигналом управления 
Изменяя величину этого сигнала можно регулировать напряжение от 0 до  , при этом частота питающей сети остаётся постоянной
, при этом частота питающей сети остаётся постоянной  Гц.
Гц.
Схема 3-фазного ТРН:
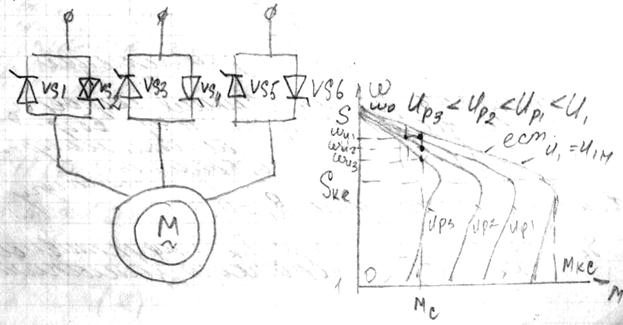
Изменяется жёсткость механической характеристики и стабильность работы ЭП.
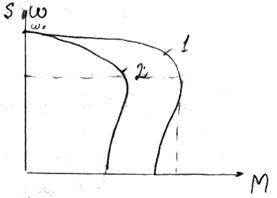
При применении замкнутой системы получаются следующие характеристики:
1) 
2) 
Регулирование скорости в системе «преобразователь частоты – АД»
Частотное регулирование применяют для 3-, 2-, 1-фазных АД и для синхронных двигателей.
Возможность регулирования скорости в АД частотой вытекает из выражения:
 , где
, где  - частота напряжения, подводимого к статору
- частота напряжения, подводимого к статору
Если принять, что 
 , где
, где  - индуктивность КЗ
- индуктивность КЗ
Частота питающей сети обратно пропорциональна критическому скольжению
Если -  , то при частоте
, то при частоте  отличной от номинальной
отличной от номинальной 
Критический момент, при условии что , равен:

Если  ,
,  то:
то:
(*)  , где С – коэффициент, равный
, где С – коэффициент, равный 
Если при - , то при 
При неизменном напряжении сети с увеличением частоты критический момент резко падает. Что при всех значениях частоты он оставался постоянным, необходимо согласно (*) изменять и подводимое напряжение. Это необходимо делать таким образом, чтобы  .
.
Закон Костенко: 
 (*)
(*)
Если учесть, что  , то
, то 

Если это выражение подставить в (*), то получим:

Виды нагрузки:
1) х = 0,  const,
const, 
2)  const, х = -1,
const, х = -1, 
3) нагрузка идеализированная, вентиляторная
х = 2,  ,
,  ,
, 
1) Закон частотного регулирования:


При постоянстве статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте.
2)  ,
, 
При постоянстве мощности статической нагрузки напряжение источника питания должно изменяться пропорционально корню квадратному из значения частоты.
3)  ,
, 
При вентиляторной нагрузке напряжение источника питания должно изменяться пропорционально квадрату частоты.
Механические характеристики, соответствующие каждому из этих случаев:
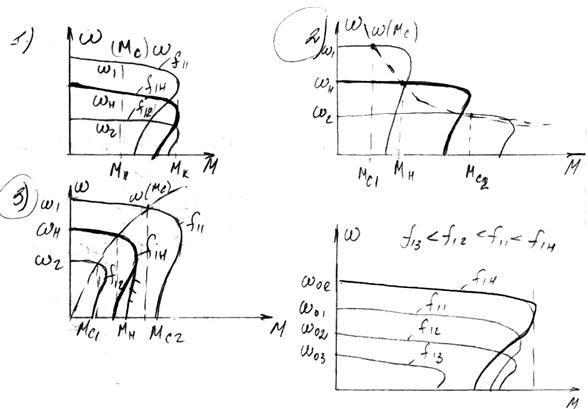
 ,
, 
При снижении частоты происходит уменьшение критического момента. Причина этого заключается в уменьшении магнитного потока АД при низких частотах, которая вызывается падением напряжения на сопротивлении R, уменьшающего ЭДС АД.
Для компенсации этого влияния, с уменьшением частоты необходимо снижать напряжение в меньшей степени, чем предусмотрено основным выражением .
Упрощённая схема при частотном управлении:
+: жёсткие механические характеристики, малые потери мощности, любая плавность регулирования, возможность 2-зонного регулирования, использование простых, дешёвых и надёжных ЭД.
-: относительная сложность схемного исполнения преобразователя частоты, высокая стоимость.
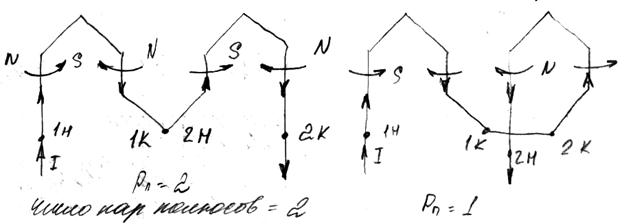
Регулирование скорости АД изменением числа пар полюсов
Этот способ применяется для регулирования скорости многоскоростных АД с КЗ-ротором. У таких АД на статоре располагается 2 или более не связанных друг с другом обмотки, имеющие разное число пар полюсов.
 ,
, 
Другой способ изменения числа пар полюсов – это изменение схемы соединения статорной обмотки. Для этого каждая фаза статора разделена на несколько одинаковых частей и имеет от них соответствующее число выводов.
Принципиальная схема включения секций одной фазы статора, обеспечивающей изменение числа пар полюсов:
На практике встречаются 2 схемы переключения статорной обмотки многоскоростных АД:
1) Δ – YY
2) Y – YY
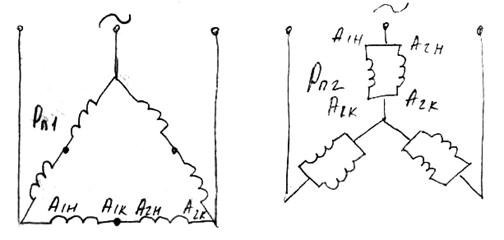
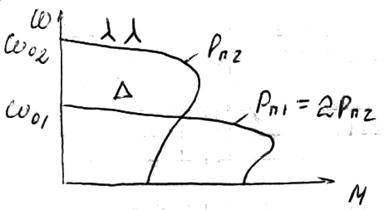
Определим допустимые мощности в 1 и 2 схемах включения:
1) 

Допустимая мощность АД при переключении остаётся неизменной. Поэтому при увеличении вдвое числа пар полюсов и уменьшении вдвое скорости вращения допустимый момент АД увеличивается примерно в 2 раза.
2) 

Допустимая мощность при переключении статорной обмотки на меньшее число пар полюсов увеличивается в 2 раза. Допустимые моменты в обоих случаях получаются одинаковыми.
+: жёсткость механических характеристик, экономичность регулирования, большая перегрузочная способность
-: ступенчатость регулирования, небольшой диапазон регулирования.
ЛИТЕРАТУРА
1. Электротехнический справочник в 4-х томах. Том 4. Использование электрической энергии / под ред. В.Г. Герасимова. Изд. МЭИ, 2005, 696 с.
2. Справочник по автоматизированному электроприводу. Под ред. Елисеева В.А., Шинянского А.В. -М., Энергоатомиздат, 1981, 576 с.
3. Москаленко В.В. Автоматизированный электропривод. Л., Энергоатомиздат, 1986, 516 с.
4. Чиликин М.М. и др. Основы автоматизированного электропривода. М.,Энергия, 1974, 567 с.

