 2015-02-04
2015-02-04 8261
8261Назначение: обеспечение управляемости судна, т.е. его способности двигаться по определённой траектории.
Конструкция рулевого устройства.
Общее расположение одного из вариантов рулевого устройства представлено на рисунке.
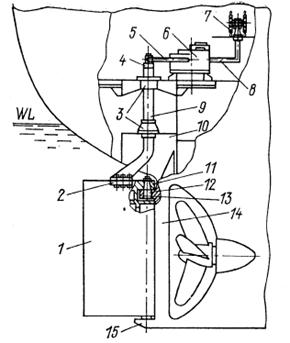
Рис. 3.1.1. Схема рулевого устройства:
1- перо руля; 2 – фланцевое соединение; 3- опоры баллера;
4 – голова баллера; 5 – рулевой привод; 6 – рулевая машина;
7- штурвал; 8 – рулевая передача; 9 – баллер; 10 – гельмпортовая труба;
11 – петля пера руля; 12 – штырь; 13 – петля рудерпоста;
14 – рудерпост; 15 – пятка ахтерштевня.
Основным элементом, создающим необходимое для маневра усилие, является перо руля 1. Для поворота пера руля на некоторый угол относительно ДП служит баллер 9 – вал переменного по длине диаметра. Участки с увеличенным по сравнению с расчётным диаметром предусматриваются в местах расположения опор баллера 3 для повышения ремонтопригодности. Для соединения баллера и пера руля чаще всего используют либо фланцевое соединение 2, изображённое на рисунке, либо конусное соединение. Баллер руля входит в кормовой подзор корпуса судна через гельмпортовую трубу 10, обеспечивающую непроницаемость корпуса, и имеет не менее двух опор 3 по высоте. Нижняя опора располагается над гельмпортовой трубой и имеет сальниковое уплотнение, препятствующее попаданию воды в корпус судна. Верхняя опора располагается непосредственно у головы баллера, обычно она воспринимает массу баллера и руля, поэтому на баллере делают кольцевой выступ.
Необходимое для поворота руля усилие на баллере создаётся посредством рулевого привода. В состав рулевого привода входят: рулевая машина 6; средства передачи крутящего момента от рулевой машины голове баллера 4 (рулевой привод - румпель или сектор 5); рулевая передача 8; а так же система дистанционного управления рулевым приводом – устройство для передачи команд по перекладке руля с ходового мостика (от штурвала 7) на органы управления рулевой машины.
Классификация рулей.
По распределению площади пера руля относительно оси вращения выделяют следующие типы рулей (рисунок 3.1.2):
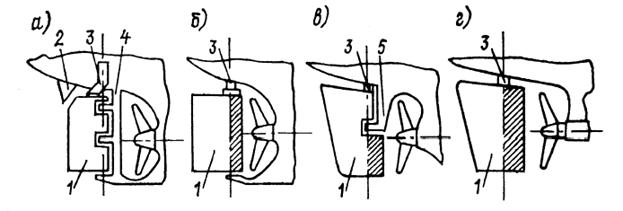
Рис. 3.1.2. Классификация рулей по распределению площади:
1 – перо руля; 2 – противоледовый выступ; 3 – баллер;
4 – рудерпост; 5- кронштейн.
- небалансирный (обычный) (рис. 3.1.2, а), ось вращения которого близка к передней (носовой) кромке пера руля (отстоит от неё на расстояние, равное радиусу опоры руля);
- балансирный (рис. 3.1.2, б), ось вращения которого смещена ближе к центру гидродинамического давления (отстоит от передней кромки на расстояние, большее радиуса опоры руля), при этом часть площади пера, находящаяся в нос от оси вращения, называется балансирной;
- полубалансирный (рис. 3.1.2, в), у которого распределение площади в нижней части пера руля соответствует балансирному, а в верхней – обычному рулю;
- подвесной (рис. 3.1.2, г), выделяется в классификации традиционно и является тем же балансирным рулём, отличающимся тем, что непосредственно на пере руля опоры не размещаются.
Балансирные и полубалансирные рули характеризуются коэффициентом балансирности kd:
 ,
,
где: Fd - часть площади пера руля, находящаяся между передней кромкой и осью вращения (балансирная), м2; F – полная площадь пера руля, м2.
Для балансирных рулей обычно kd = 0,21¸0,23, для полубалансирных kd = 0,15.
Достоинство балансирных и полубалансирных рулей: вследствие меньшего отстояния центра давления от оси вращения момент на баллере требуется меньше, чем у небалансирных.
Недостаток – крепление таких рулей к судну сложнее и менее надёжно.
По форме профиля выделяют следующие типы рулей:
- плоские однослойные, из-за своей низкой эффективности применяются редко – в основном на несамоходных судах;
- профилированные двухслойные (обтекаемые), состоящие из наружной обшивки и внутреннего набора. Набор формируется из горизонтальных рёбёр и вертикальных диафрагм, сваренных друг с другом. Гоизонтальные рёбра крепятся к основе пера руля – рудерпису, представляющему собой массивный вертикальный стержень. Рудерпис изготавливается вместе с петлями для навешивания пера руля на рудерпост. Конкретную форму профиля руля как правило подбирают экспериментально, соответственно, именуют профили по названию лабораторий, в которых они разработаны.
Рулевые приводы, их виды, конструкция и требования к ним.
Рулевой привод предназначен для непосредственного выполнения перекладки руля и контроля его положения.
В составе рулевого привода можно выделить (достаточно условно) следующие элементы:
- устройство для передачи крутящего момента от рулевой машины к баллеру (иногда называемое собственно рулевым приводом);
- рулевая машина – силовая установка, создающая необходимое усилие для поворота баллера;
- рулевая передача, осуществляющая связь между постом управления и рулевой машиной;
- система контроля.
Выделяют следующие основные виды рулевых приводов:
- механические (ручные), к которым относятся румпельно-штуртросовые, секторно-штуртросовые, секторные с валиковой проводкой, винтовые румпельные;
- имеющие источник энергии (гидравлические, электрические, электрогидравлические).
Механические приводы применяются только на малых судах и в качестве вспомогательных рулевых приводов.
Требования к рулевым приводам содержатся в Правилах классификации и постройки морских судов РМРС (том 1, раздел III «Устройства, оборудование и снабжение», п. 2 «Рулевое устройство» и том 2, раздел IX «Механизмы», п.6.2 «Рулевые приводы»). Среди основных требований можно выделить следующие:
1. Все суда должны быть снабжены главным и вспомогательным рулевыми приводами, действующими независимо один от другого.
2. Главный привод и баллер должны обеспечивать перекладку руля с 350 одного борта на 300 другого борта не более чем за 28 с при максимальной эксплуатационной осадке и скорости переднего хода.
3. Вспомогательный привод должен обеспечивать перекладку руля с 150 одного борта на 150 другого борта не более чем за 60 с при максимальной эксплуатационной осадке и скорости хода, равной половине максимальной эксплуатационной скорости переднего хода или 7 уз (в зависимости от того что больше).
4. На нефтеналивных судах, газовозах и химовозах валовой вместимостью 10000 и более, на прочих судах вместимостью 70000 и более, а также на всех атомных судах главный рулевой привод должен включать в себя два (или более) одинаковых силовых агрегата. Соответственно, для них должны быть предусмотрены две независимых системы управления с ходового мостика.
5. Управление главным приводом должно быть предусмотрено с ходового мостика и из румпельного отделения.
6. Управление вспомогательным приводом должно быть предусмотрено из румпельного отделения, а в том случае если он действует от источника энергии – должно быть предусмотрено также независимое управление с ходового мостика.
7. Конструкция рулевых приводов должна обеспечивать переход при аварии с главного привода на вспомогательный за время не более 2 мин.
8. Должен быть обеспечен контроль положения руля.
Выделяют следующие типы рулевых приводов:
- Продольно-румпельный, в котором одноплечий румпель, насаженный на головку баллера, расположен в продольном направлении (рис. 3.1.3, а);
- Поперечно-румпельный, в котором румпель представляет собой двуплечий рычаг (рис. 3.1.3, б) – название при этом условно, т.к. румпель может находиться как вдоль, так и поперёк ДП судна;
- Секторный, в котором насаженный на головку баллера сектор поворачивается ведущей шестернёй рулевой машины (рис. 3.1.3, в).
а) 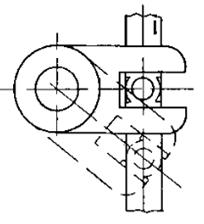 б)
б)  в)
в) 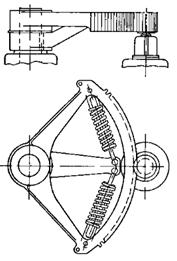
Рис. 3.1.3 Типы рулевых приводов:
а – продольно-румпельный; б – поперечно-румпельный; в секторный.
В настоящее время на крупных судах получил распространение поперечно-румпельный привод с совмещённой с ним четырёхплунжерной гидравлической рулевой машиной.
Выделяют следующие типы рулевых передач:
- валиковая, при которой связь между постом управления и исполнительным механизмом (например, золотником гидравлической рулевой машины) осуществляется посредством системы стальных валиков (отрезков труб), соединённых между собой с помощью шарниров или конических зубчатых передач;
- гидравлическая, в которой используется объёмный гидропривод;
- электрическая, состоящая из системы самосинхронизирующихся двигателей – при вращении штурвала в роторе передающего двигателя (генератора) возбуждается ток, вызывающей вращение ротора приёмника, соединённого с исполнительным механизмом рулевой машины.
Из различных типов рулевых машин наибольшее распространение получили электрические и электрогидравлические рулевые машины.
Наиболее распространёнными на современных судах являются электрогидравлические четырёхплунжерные рулевые машины с поперечно-румпельным рулевым приводом. Конструкция такой ЭГРМ с механической обратной связью приведена на рисунке 3.1.4.

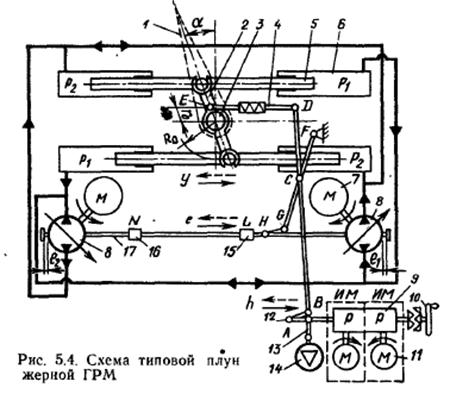
Рис. 3.1.4 Электрогидравлическая рулевая машина (ЭГРМ)
Два идентичных исполнительных механизма ИМ (приводимых в действие электродвигателями 11 от двух электрических линий управления) работают на один выходной управляющий элемент – шток 12. Перемещение штока h (являющееся заданием на перекладку руля) с помощью рычагов BD и FG, соединённых в точке С, и штанги 17 передаётся насосам регулируемой подачи 8, приводимых в действие электродвигателями 7. Насосы согласно полученным перемещениям е1 и е2 регулируемых органов создают подачу Q1 и Q2 соответственно.
При работе насосов в цилиндрах рулевой машины 6 создаётся перепад давлений р1 – р2, в результате чего баллер 3 посредством плунжеров 5 и румпеля 2 поворачивается, и руль 1 перекладывается на некоторый угол a.
При этом обратная механическая связь 4 возвращает посредством рычагов DB и FG штангу 17 в исходное среднее положение, в котором суммарное перемещение регулируемых органов насосов е = 0. Давления в полостях цилиндров выравниваются, перемещение руля останавливается и поддерживается заданный угол a. Таким образом, данная ЭГРМ с механической обратной связью представляет собой автономную следящую систему, включённую последовательно замкнутому контуру электрической системы управления.
Указатели положения руля на мостике получают электрический сигнал от датчика 14, приводимого в действие рычагом 13, соединённым со штоком 12.
Для согласования нулевых положений штанги и управляемых органов насосов служит регулировочное устройство, состоящее из винтовых соединений 15 и 16 на концах штанги NL. Серьги AB и HG компенсируют взаимное перемещение рычагов.
В случае отказа дистанционной системы управления рулевая машина приводится в действие штурвалом 10, соединённым с редуктором 9.

