2015-03-20
2015-03-20 802
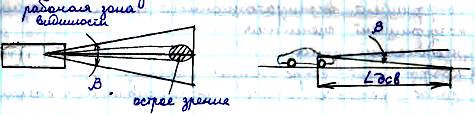
802Видимость на дороге – это минимальная зона видимости пути в направлении движения в плане и продольном профиле, с которой водитель воспринимает пусковую и установочную информацию об условиях дорожного движения, необходимую ему для безопасного управления транспортным средством с расчетной скоростью и в случае необходимости иметь возможность своевременно принять меры для остановки автомобиля перед препятствием.
Зона видимости пути за капотом автомобиля зависит от оптикофизиологических особенностей зрения водителя, видимости сквозь лобовое стекло, геометрической и метеорологической видимости зрения.
Расчетное расстояние видимости – расстояние на которое водитель должен видеть впереди себя дорогу, чтобы остановиться перед препятствием или объехать его.
Расчетная видимость определяется по трем группам схем:
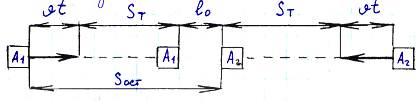
1. 1.Схема торможения – предусматривает остановку автомобиля перед препятствием или встречным автомобилем.
2. 2.Схема объезда – исходит из условия объезда автомобилем препятствия или обгона попутного автомобиля с заездом на смежную полосу встречного движения.
3. Схема равномерного движения с расчетной скоростью – учитывает первую и вторую расчетные схемы, тормозные и динамические качества автомобиля и психофизиологические особенности восприятия водителем условий движения.
Видимость дороги, объектов на ней и прилегающей к ней территории зависит от угловых размеров объектов, времени предъявления объектов наблюдения, уровня освещенности, прозрачности атмосферы и лобового стекла автомобиля, зрительных функций водителя.
С позиции безопасности движения дальность видимости дорожных объектов служит основным показателем условий видимости.
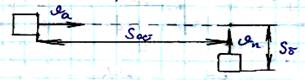
Требование к видимости на автомобильной дороге может быть записано: Sфакт >Sост
где Sфакт – фактическая видимость.
По схеме торможения:
V- скорость движения;
t- суммарное время реакции водителя и срабатывания тормозов;
Кэ- коэффициент эксплуатационного состояния тормозов;
i- продольный уклон;
f- коэффициент сопротивления качению;
lо- запас, расстояние между остановившимся автомобилем и препятствием.
По схеме объезда:
По схеме равномерного движения с расчетной скоростью:
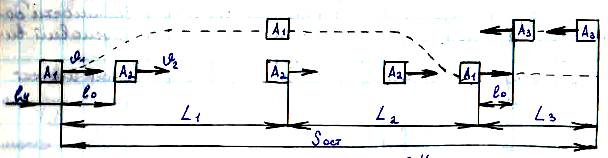
При выводе формулы приняты следующие допущения:
Ø скорости V1, V2, V3 не изменяются в течение обгона;
Ø обгон производится сходу;
Ø приемистость автомобиля не учитывается (способность увеличивать скорость);
Ø погрешность зрения водителя при определении видимости обгона не учитывается.
Впервые боковая видимость была включена в нормативы по проектированию а/д в 1962г.