 2015-03-27
2015-03-27 3794
3794Различают методы объединения асинхронных цифровых потоков с односторонним - положительным или отрицательным и двусторонним - положительно-отрицательным - согласованием скоростей. В системах с односторонним согласованием скоростей частота считывания  выбирается заведомо большей или меньшей (в зависимости от знака согласования скоростей), чем частота записи
выбирается заведомо большей или меньшей (в зависимости от знака согласования скоростей), чем частота записи  При положительном согласовании предполагается, что сумма максимальных скоростей компонентных (входных) потоков меньше скорости агрегатного (выходного) потока. При этом выполняется условие
При положительном согласовании предполагается, что сумма максимальных скоростей компонентных (входных) потоков меньше скорости агрегатного (выходного) потока. При этом выполняется условие
 (3.9)
(3.9)
В этом случае при возникновении неоднородности (см. рис. 3.6,в) в считанную последовательность вводится (путем запрета одного импульса считывания) дополнительная (неинформационная) импульсная позиция, т.е. вводится согласующий тактовый интервал. На приемную станцию передается соответствующая команда согласования, в соответствии с которой указанная позиция исключается из восстанавливаемого потока.
В передающей части оборудования временного группообразования (ОВГ) или мультиплексирования, использующего метод положительного согласования скоростей, входная информация записывается в записывающее устройство (ЗУ) с частотой  соответствующей скорости передачи компонентного потока. Считывание информации из ЗУ осуществляется с частотой
соответствующей скорости передачи компонентного потока. Считывание информации из ЗУ осуществляется с частотой  синхронной с частотой местного задающего генератора (ЗГ). Так как
синхронной с частотой местного задающего генератора (ЗГ). Так как  то в процессе считывания существует возможность
то в процессе считывания существует возможность
полного освобождения (опустошения) ячеек ЗУ. Специальная схема контроля (временной детектор ВД) сравнивает фазы сигналов записи и считывания, т.е. текущее значение  (рис. 3.6,а), и тем самым контролирует состояние заполнения ячеек памяти. Когда заполнение памяти оказывается ниже допустимого предела, схема контроля задерживает один импульс считывания. В результате этого в считанной последовательности возникает дополнительный согласующий символ, который отсутствовал во входном потоке и который обеспечивает необходимое заполнение ЗУ передающего оборудования. Так как для передачи согласующего символа в цикле передачи формируемого выходного потока выделена строго определенная позиция, то для устранения этого символа достаточно на приемную станцию передать информацию о том, что имело место согласование скоростей, т. е. команду согласования. На приемной стороне символ согласования устраняется из цифрового потока путем задержки записи в ЗУ на время длительности данного символа. При этом формируется поток с такой же скоростью, как у входного потока, но с дрожанием фазы в один тактовый интервал. Сглаживание фазового дрожания (ФД) осуществляется с помощью цепи фазовой автоподстройки частоты (ФАПЧ).
(рис. 3.6,а), и тем самым контролирует состояние заполнения ячеек памяти. Когда заполнение памяти оказывается ниже допустимого предела, схема контроля задерживает один импульс считывания. В результате этого в считанной последовательности возникает дополнительный согласующий символ, который отсутствовал во входном потоке и который обеспечивает необходимое заполнение ЗУ передающего оборудования. Так как для передачи согласующего символа в цикле передачи формируемого выходного потока выделена строго определенная позиция, то для устранения этого символа достаточно на приемную станцию передать информацию о том, что имело место согласование скоростей, т. е. команду согласования. На приемной стороне символ согласования устраняется из цифрового потока путем задержки записи в ЗУ на время длительности данного символа. При этом формируется поток с такой же скоростью, как у входного потока, но с дрожанием фазы в один тактовый интервал. Сглаживание фазового дрожания (ФД) осуществляется с помощью цепи фазовой автоподстройки частоты (ФАПЧ).
При отрицательном согласовании скоростей предполагается, что частота записи в ЗУ передающего оборудования больше частоты считывания, т. е. выполняется условие
(3.10)

В этом случае при возникновении неоднородности из информационной последовательности в передающей части ОВГ удаляется один информационный символ, который передается на приемную станцию по дополнительному (служебному) каналу. На приемной стороне после приема соответствующей команды согласования этот символ вводится в восстанавливаемую последовательность. Таким образом, при отрицательном согласовании скоростей на передаче существует тенденция к переполнению ЗУ, т. е. протекают процессы, обратные процессам при положительном согласовании скоростей.
В системах с положительно-отрицательным (двусторонним) согласованием номинальные частоты записи и считывания информации на передаче предполагаются примерно равными, т. е. в некоторый момент времени может выполняться любое из условий (3.9), (3.10). В этом случае имеем следующее соотношение между частотами записи и считывания:
(3.11)

При двустороннем согласовании скоростей в зависимости от знака текущей разности частот записи и считывания необходимо либо вводить в считанную последовательность дополнительный символ согласования (т. е. осуществлять положительное согласование), либо передавать некоторый информационный символ по дополнительному каналу (т. е. осуществлять отрицательное согласование). При этом в передающей части ОВГ необходимо формировать информацию не только о наличии согласования, но и об его знаке.
Важно отметить, что в ОВГ в качестве неоднородностей воспринимаются только те временные сдвиги (ВС), которые вызваны разностью частот  Сдвиги, вызванные дополнительным повышением частоты
Сдвиги, вызванные дополнительным повышением частоты  считывания на величину /сл с целью передачи в цикле различной служебной информации, не требуют передачи информации о согласовании.
считывания на величину /сл с целью передачи в цикле различной служебной информации, не требуют передачи информации о согласовании.
Как отмечалось выше, процесс согласования скоростей требует использования в ОВГ запоминающих устройств (ЗУ), играющих роль буферной памяти (БП). Использование БП для накопления информационных символов обусловлено также необходимостью введения в цикл передачи группового потока ряда дополнительных импульсных позиций (для циклового синхронизма, команд согласования скоростей, служебной связи и т. п.). Емкость ЗУ ОВГ должна быть такой, чтобы она могла поглощать наибольшие изменения фазы. Обычно она не превышает восьми ячеек на каждый компонентный поток. При известной структуре цикла изменения фазы сигнала вследствие ввода синхросигнала известны: величина изменения фазы определяется длительностью синхросигнала, а частота длительностью цикла.
Фазовые дрожания (ФД), возникающие в линейном тракте, содержат случайную и систематическую составляющие. ФД, вызванные шумами и неидеальностью регенераторов, носят случайный характер и, как правило, имеют небольшие значения. Систематические ФД, связанные со структурой передаваемого цифрового сигнала и линейного тракта, зависят от длины линии и числа регенераторов. Спектр ФД, вызванных этими причинами, находится в основном в диапазоне низких частот.
Кроме того, при передаче цифровых сигналов с использованием временного группообразования ФД возникают еще по двум причинам:
- за счет процесса согласования скоростей, при котором с частотой со
гласования возникают сдвиги фазы на величину периода считывания;
- за счет того, что решение о необходимости согласования может быть
принято в любом месте цикла (в любой момент времени), а само согласо
вание осуществляется только в определенном (заранее выделенном) месте
цикла, т. е. вследствие ожидания момента согласования.
Фазовые дрожания, обусловленные указанными причинами, имеют значительную часть составляющих в низкочастотной части спектра (до нескольких долей герца), что существенно затрудняет их подавление. Если не принимать специальных мер, то они могут привести к заметному ухудшению качества передачи.
Важным параметром ОВГ является частота формирования сигналов согласования  . Если заведомое превышение частоты считывания над частотой записи при положительном согласовании скоростей и частоты записи над частотой считывания при отрицательном согласовании равно
. Если заведомое превышение частоты считывания над частотой записи при положительном согласовании скоростей и частоты записи над частотой считывания при отрицательном согласовании равно
 то можно записать
то можно записать  , Тогда в соответствии с (3.3), (3.4) и
, Тогда в соответствии с (3.3), (3.4) и
(3.6) и с учетом того, чтс  в системах с положительным согла
в системах с положительным согла
сованием скоростей можно получить
где  Аналогично для систем с отрицательным согласованием получим Аналогично для систем с отрицательным согласованием получим |
Так как в системах с двусторонним согласованием скоростей  , то
, то

Численные расчеты, проведенные по формулам (3.12) - (3.14), показывают:
- частота формирования сигналов /с при двустороннем согласовании
существенно меньше, чем при любом методе одностороннего согласования;
- частота передачи команд согласования скоростей определяется от
носительной нестабильностью частот записи и считывания и имеет весьма
малые значения. Это позволяет выделять для передачи команд согласова
ния скоростей 1...2% пропускной способности группового тракта. Такой
способ используется во всех ДСП, осуществляющих объединение асин
хронных цифровых потоков: вторичных (Е2), третичных (ЕЗ) и четверич
ных (Е4) и др.
Поскольку отрицательное согласование скоростей не имеет никаких преимуществ по сравнению с положительным согласованием, а реализуется с помощью более сложных устройств, то в качестве самостоятельного метода группообразования оно не используется.
На практике нашли применение два метода согласования скоростей: положительное (одностороннее) и положительно-отрицательное (двустороннее). Второй метод, на первый взгляд, имеет некоторые недостатки по сравнению с односторонним согласованием. Во-первых, он требует более сложной аппаратуры, так как обеспечивается возможность использованиясогласования любого знака. Во-вторых, фазовые дрожания, возникающие при этом согласовании, имеют очень низкую частоту (порядка долей герца), что затрудняет их эффективное сглаживание в приемном оборудовании. Это объясняется тем, что при номинальных скоростях записи и считывания согласование не производится. Однако следует заметить, что указанный недостаток присущ способу двустороннего согласования при использовании трехкомандного управления, когда в процессе объединения цифровых потоков могут формироваться и передаваться три типа команд: отсутствие согласования, наличие положительного согласования и наличие отрицательного согласования. В 1976 г. МККТТ (ныне МЭСТ) рекомендовал использовать метод двустороннего согласования скоростей с двухкоманд-ным управлением. Двухкомандное управление заключается в применении двух команд: о наличии положительного согласования (+) и о наличии отрицательного согласования (-). Нулевая команда (отсутствие согласования) заменяется чередованием двух указанных команд согласования (+, -).
Двустороннее согласование с двухкомандным управлением обеспечивает ряд существенных преимуществ по сравнению с односторонним согласованием:
1. В ОВГ с односторонним согласованием скоростей принципиально
невозможен синхронный режим работы (из-за заведомого превышения
частоты считывания над частотой записи), в то время как для ОВГ с дву
сторонним согласованием скоростей синхронный режим является част
ным случаем асинхронного режима. В ОВГ с двусторонним согласовани
ем в синхронном режиме не вырабатываются и не передаются команды
согласования, что обеспечивает повышение пропускной способности ка
нала передачи и помехоустойчивости из-за отсутствия возможного иска
жения этих команд. Таким образом, системы с двусторонним согласова
нием скоростей могут успешно использоваться на любых участках цифро
вой сети связи.
В ОВГ с двусторонним согласованием скоростей можно обеспечить
практически неограниченное повышение помехоустойчивости команд
согласования. Это обусловлено тем, что частота следования моментов
согласования скоростей в оборудовании с двусторонним согласованием в
десятки раз меньше, чем в оборудовании с односторонним согласованием.
Следовательно, можно выбирать длительность команд сколь угодно боль
шой. Кроме того, помехоустойчивость приема команд согласования мо
жет быть повышена в системах с двусторонним согласованием и путем
анализа структуры команд без увеличения их длительности (при этом мо
гут быть исправлены не только одиночные, но и сдвоенные, строенные и
т. д. искажения команд согласования)
3. ОВГ с двусторонним согласованием скоростей более устойчиво к размножению сбоев цикловой синхронизации, т. е. к возникновению сбоев цикловой синхронизации в системах низшей ступени иерархии при сбое цикловой синхронизации на более высоком уровне. Это связано с тем, что в системах с односторонним согласованием за время сбоя синхронизации формируется достаточно большое число (до нескольких десятков) команд согласования, в то время как в системах с двусторонним согласованием обычно не более одной команды. В последнем случае за счет сбоя синхронизма можно обеспечить коррекцию согласования после восстановления синхронизма.
Кроме того, двустороннее согласование дает возможность повысить эффективность использования пропускной способности группового тракта, так как при одностороннем согласовании скоростей приходится выбирать большую частоту считывания.
Следует также еще раз отметить, что частота формирования команд согласования в ОВГ с односторонним согласованием существенно больше, чем в системах с двусторонним согласованием, т. е. требуется большая пропускная способность соответствующего служебного канала. Минимальный интервал между моментами согласования в оборудовании формирования потока Е2 при двустороннем согласовании составляет более 100 циклов передачи, а при одностороннем - только два цикла.
Что касается отмеченных ранее недостатков ОВГ с двусторонним согласованием скоростей, то здесь следует сделать ряд оговорок. При идентичном построении циклов передачи большинство узлов (запоминающие устройства, генераторное оборудование, преобразователи кодов, устройства цикловой синхронизации и др.) практически одинаковы.
Более сложными в системах с двусторонним согласованием оказываются лишь формирователи и приемник команд согласования, однако эти устройства могут использоваться в групповом режиме, так как частота формирования команд согласования для каждого из компонентных потоков невелика.
Вносимые оборудованием с двусторонним согласованием фазовые дрожания (ФД) в принципе могут быть уменьшены до величины, составляющей несколько процентов от периода считывания (при передаче информации о промежуточных значениях временного интервала между моментами записи и считывания), что значительно меньше ФД, вносимых оборудованием с односторонним согласованием.
При построении систем передачи ПЦИ высших ступеней применяется как двустороннее согласование с двухкомандным управлением, так и одностороннее положительное согласование
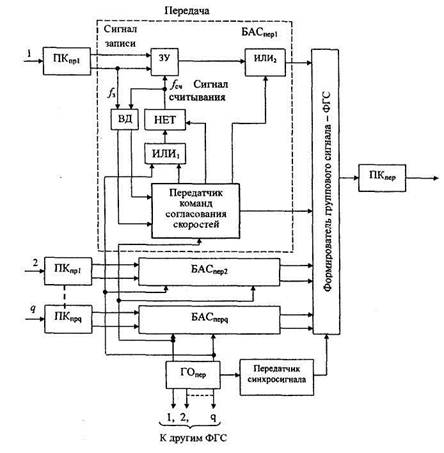
Рис. 3.7. Структурная схема тракта передачи ОВГ объединения асинхронных цифровых потоков
и формирование импульсных последовательностей с частотой записи  равной тактовой частоте компонентных цифровых потоков. Сигналы с выхода
равной тактовой частоте компонентных цифровых потоков. Сигналы с выхода  подаются в блоки асинхронного сопряжения
подаются в блоки асинхронного сопряжения
 предающей части. В блоке асинхронного сопряжения цифровой поток записывается в запоминающее устройство ЗУ и считыва-ется сигналом, поступающим от соответствующего выхода генераторного оборудования
предающей части. В блоке асинхронного сопряжения цифровой поток записывается в запоминающее устройство ЗУ и считыва-ется сигналом, поступающим от соответствующего выхода генераторного оборудования  передающей станции.
передающей станции.
Процессом записи управляет импульсная последовательность с частотой  а процессом считывания управляет импульсная последовательность с частотой
а процессом считывания управляет импульсная последовательность с частотой  Сигналы считывания и управления записью поступают на вход временного детектора (ВД), в котором определяются моменты возникновения и вид (знак) неоднородности. По сигналу о наличии неоднородности того или иного вида, когда изменение временного интервала между импульсными последовательностями записи и считывания достигает периода считывания, вырабатывается соответствующая команда о наличии вставок, т.е. согласования скоростей. При этом положительное-согласование скоростей осуществляется запретом с помощью логического элемента НЕТ одного импульса считывания, а отрицательное - дополнительным считыванием, которое производится с помощью логического элемента
Сигналы считывания и управления записью поступают на вход временного детектора (ВД), в котором определяются моменты возникновения и вид (знак) неоднородности. По сигналу о наличии неоднородности того или иного вида, когда изменение временного интервала между импульсными последовательностями записи и считывания достигает периода считывания, вырабатывается соответствующая команда о наличии вставок, т.е. согласования скоростей. При этом положительное-согласование скоростей осуществляется запретом с помощью логического элемента НЕТ одного импульса считывания, а отрицательное - дополнительным считыванием, которое производится с помощью логического элемента  Далее сигналы с выхода ЗУ поступают на логический
Далее сигналы с выхода ЗУ поступают на логический
элемент ИЛИ2, на второй вход которого поступают сигналы с передатчика команд согласования скоростей (Пер. КСС). Сигналы с выходов БАС nepi - БАС nepq и передатчика синхросигнала через формирователь группового сигнала (ФГС) поступают в передающий преобразователь ко-Да(ПКпер).
Рассмотрим с помощью временной диаграммы характер процессов, происходящих в передающей части, для случая, когда частота считывания
 превосходит частоту записи
превосходит частоту записи 
На рис. 3.8,а показано изменение временного интервала между импульсными последовательностями записи и считывания для случая, когда согласование скоростей происходит в моменты достижения временным интервалом величины, равной периоду считывания  Однако
Однако
в реальных системах согласование скоростей может производиться только строго в определенные моменты времени, соответствующие сигналам с выхода генераторного оборудования  Очевидно, что должно выполняться условие
Очевидно, что должно выполняться условие 
В результате того, что моменты, в которые происходит согласование, детерминированы, имеет место время ожидания момента согласования скоростей после того, как изменение временного интервала (ВИ) превзошло период считывания. Это время ожидания?0 равно длительности
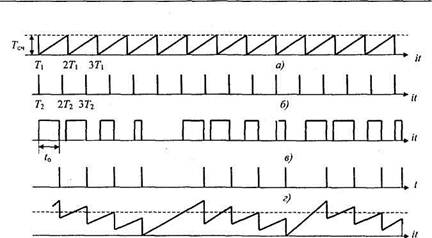
Рис. 3.8. Временные диаграммы работы передающей части ОВГ
импульсов, изображенных на рис. 3.8,в. Торможение процесса считывания производится в моменты, показанные на рис. 3.8,г. Изменение ВИ между моментами считывания и записи с учетом ожидания имеет вид, показанный на рис. 3.8 Д
В тракте приема (рис. 3.9) импульсные последовательности с выходов  открывают поочередно логические элементы
открывают поочередно логические элементы  распредели-
распредели-
теля группового сигнала (РГС), обеспечивая правильное распределение группового сигнала с выхода  между приемными блоками асинхронного сопряжения цифровых потоко]
между приемными блоками асинхронного сопряжения цифровых потоко]  ,...,,
,...,,  в которых восстанавливается первоначальная скорость компонентных цифровых потоков.
в которых восстанавливается первоначальная скорость компонентных цифровых потоков.
Восстановление производится путем записи цифрового потока в ЗУ и считывания с частотой, равной средней частоте записи, вырабатываемой устройством фазовой автоподстройки частоты (ФАПЧ), которое содержит генератор, управляемый напряжением (ГУН), схему управления (СУ) и временной детектор (ВД), на выходе которого формируется сигнал, соответствующий текущему значению временного интервала между моментами записи и считывания.
Процессом записи управляет импульсная последовательность с соответствующего выхода  По сигналу о необходимости положительного согласования скоростей осуществляется запрет записи информации в ЗУ. Временное положение сигнала запрета соответствует моменту согласования скоростей в передающем устройстве.
По сигналу о необходимости положительного согласования скоростей осуществляется запрет записи информации в ЗУ. Временное положение сигнала запрета соответствует моменту согласования скоростей в передающем устройстве.
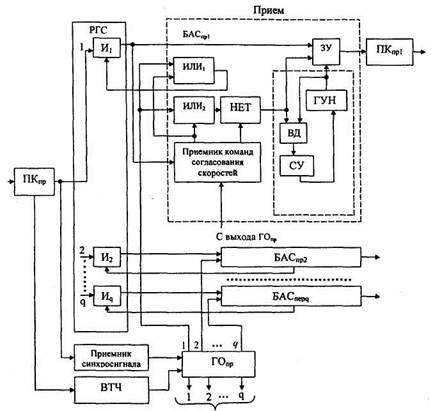
К приемникам команд согласования
Рис. 3.9. Структурная схема тракта приема ОВГ объединения асинхронных
цифровых потоков
По сигналу о необходимости отрицательного согласования скоростей с помощью логического элемента  открывается логический элемент И распределителя группового сигнала (РГС) и в передаваемый сигнал вводится дополнительный символ. Одновременно дополнительный импульс через логический элемент ИЛИ2 вводится в сигнал управления записью. Частотой ГУН управляет напряжение, соответствующее постоянной составляющей сигнала на выходе ВД. Характер изменения сигнала на выходе ВД показан на рис.
открывается логический элемент И распределителя группового сигнала (РГС) и в передаваемый сигнал вводится дополнительный символ. Одновременно дополнительный импульс через логический элемент ИЛИ2 вводится в сигнал управления записью. Частотой ГУН управляет напряжение, соответствующее постоянной составляющей сигнала на выходе ВД. Характер изменения сигнала на выходе ВД показан на рис.  Переменные составляющие сигнала, управляющего работой ГУН, вызывают временные флуктуации считываемой
Переменные составляющие сигнала, управляющего работой ГУН, вызывают временные флуктуации считываемой
последовательности, а следовательно, и выходного сигнала. Поэтому степень подавления переменных составляющих в управляющем напряжении влияет на значение временных флуктуации выходного сигнала.

