| 19.1.001 | Укажите, что необходимо предпринять для автоматического или дистанционного включения механизма или установки, остановленных срабатыванием защитного устройства Вручную произвести возврат защитного устройства в исходное стояние Выключить и включить питание Отключить сигнализацию Литература: Правила классификации и постройки морских судов. Том 2. СПб. РМРС. 2003. -619с. Часть XV, правило 2, параграф 2.4.2 Комментарий: Возможность автоматического или дистанционного включения механизмов и установок, остановленных срабатыванием защитного устройства, должна осуществляться только после ручного возврата защитного устройства в исходного положение | |
| 19.1.002 | Нужно ли контролировать состояние дизель-генератора, находящегося в горячем резерве, при наличии системы автоматического запуска? Необходим периодический контроль Не требуется Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997. 343с. Часть 3, правило 1, параграф 1.10.5 Комментарий: При наличии системы автоматизированного запуска дизель - генераторов необходимо периодически контролировать состояние дизеля, находящегося в горячем резерве. При автоматическом запуске дизеля следует установить причину запуска и проверить значение контролируемых параметров имеющимися средствами. После исчезновения надобности в работе резервного дизель-генератора его следует остановить и вновь ввести в горячий резерв | |
| 19.1.003 | Разрешается ли отключать устройства автоматического контроля сопротивления изоляции, если установлен щитовой прибор измерения сопротивления изоляции? Разрешается отключать только звуковой сигнал, который после отключения аварийного участка должен быть снова включен Разрешается Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 6, правило 15, параграф 15.1 Комментарий: 1. Измерение общего сопротивления изоляции судовых сетей и работающего электрооборудования щитовыми приборами должно производиться не реже одного раза в сутки. Это сопротивление не нормируется. Для его приближенной оценки рекомендуются следующие значения: 1) Силовая сеть распределения электроэнергии при числе установленных потребителей: до 50 -не менее 0,05 Мом, от 50 до 100 -не менее 0,025 Мом, свыше 100 -не менее 0,02 Мом; 2) Сеть освещенная при числе осветительных точек, получающих питание от одного источника: до 100 -не менее 0,05 Мом, от 100 до 500 - не менее 0,03 Мом, свыше 500 - не менее 0,02 Мом. 2. Устройства автоматического контроля сопротивления изоляции должны быть постоянно включены. При срабатывании устройств следует отключать только звуковой сигнал, который сразу после отключения участка с пониженным сопротивлением изоляции должен быть снова включен | |
| 19.1.004 | Укажите, какие двигатели переменного тока используются в качестве исполнительных в системах автоматического управления? Двухфазные асинхронные двигатели с короткозамкнутым ротором Трехфазные асинхронные двигатели с короткозамкнутым ротором Трехфазные асинхронные двигатели с фазным ротором Литература: Жадобин Н.Е., Крылов А.П., Малышев В.А. Элементы и функциональные устройства судовой автоматики. Учебник. 2-е изд., переработанное и дополненное СПб.: ЭЛМОР, 1998.440с. Часть 5, глава 11, параграф 11.5 Комментарий: В качестве исполнительных двигателей переменного тока основное применение нашли двухфазные асинхронные двигатели с короткозамкнутым ротором | |
| 19.1.005 | Укажите, какие датчики в системах автоматического управления используются для измерения электрического тока без разрыва контролируемой цепи? Трансформаторы тока Трансреакторы Резисторы Комментарий: В системах автоматического управления используются для измерения электрического тока без разрыва контролируемой цепи трансформаторы тока. Первичной обмоткой измерительного трансформатора тока является проводник с измеряемым током. К вторичной обмотке подключаются измерительные цепи или реле | |
| 19.1.006 | При неполадках в работе устройств аварийно-предупредительной сигнализации и защиты автоматического регулирования (управления) и необходимости продолжения работы технического средства необходимо: Отключить устройства аварийно-предупредительной сигнализации Немедленно перейти на ручное регулирование Усилить наблюдение за техническим средством Литература: ПТЭ СТС и конструкций. РД 31.21.30-97, Разработано ЗАО ЦНИИМФ, СПб. 1997.343с. Часть 1, правило 4, параграф 4.2 Комментарий: Запрещается отключать устройства аварийно-предупредительной сигнализации и автоматической защиты, за исключением случаев, специально оговоренных в соответствующих пунктах Правил или в инструкциях по эксплуатации. При неисправности этих устройств за работающим техническим средством должно быть установлено усиленное наблюдение, обеспечивающее его безаварийную работу. Должны быть приняты меры по восстановлению работоспособности устройств | |
| 19.1.007 | Укажите, как часто лица, использующие автоматические технические средства, должны проходить учебные тренировки для обработки навыков перехода с автоматического управления на ручное? Периодичность тренировок устанавливает судовладелец В соответствии с правилами технической эксплуатации автоматизированных механизмов В соответствии с инструкцией заводов-изготовителей автоматизированных механизмов Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 1, правило 4, параграф 4.3 Комментарий: При неполадках в работе устройств аварийно-предупредительной сигнализации и защиты, автоматического регулирования (управления) и необходимости продолжения работы технического средства следует немедленно перейти на ручное регулирование (управление), усилить наблюдение и принять меры к скорейшему устранению неисправности. Лица судового экипажа, использующие технические средства, должны периодически проводить учебные тренировки для отработки навыков перехода с автоматического управления на ручное. Периодичность и процедуру тренировок устанавливает судовладелец | |
| 19.1.008 | Установки срабатывания и временных задержек средств автоматизации объектов должен контролировать Ответственный по заведованию Вахтенный механик Старший механик Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 1, правило 4, параграф 4.4 Комментарий: Величина установок срабатывания и временных задержек средств автоматизации объектов должна контролироваться ответственными по заведованию лицами. При обнаружении выхода контролируемых сил регулируемых параметров, временных задержек, установок срабатывания за пределы установленных значений необходимо в возможно короткий срок выполнить настройки и регулировку средств автоматизации | |
| 19.1.009 | При разборке автоматизированного механизма Датчики системы автоматического управления необходимо отсоединить и снять до разборки Разборку необходимо производить с осторожностью, чтобы не повредить датчики системы автоматического управления Литература: ПТЭСТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 1, правило 3, параграф 3.2.4 Комментарий: Перед разборкой снять или отсоединить все, контрольно-измерительные приборы и датчики, которые могут быть повреждены. Необходимо произвести замеры, определяющие зазоры и взаимное расположение деталей и сборочных единиц | |
| 19.1.010 | Проверка работоспособности запасных электронных блоков, модулей и печатных плат систем управления осуществляется Установкой на несколько часов взамен соответствующих штатных Путем внешнего осмотра С использованием логических анализаторов С использованием индикаторов тока Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 6, правило 12, параграф 12.5 Комментарий: Запасные электронные блоки, модули и печатные платы необходимо ежегодно устанавливать взамен соответствующих штатных для проверки их работоспособности в течение, по крайней мере, несколько часов | |
| 19.1.011 | Укажите, как часто должна производиться поверка датчиков, контролирующих основные параметры энергетической и электроэнергетической установки? Не реже одного раза в четыре года Не реже одного раза в год Не реже одного раза в пять лет Литература: ПТЭ СТС и конструкций. РД 31.21.30-97. Разработано ЗАО ЦНИИМФ. СПб. 1997.343с. Часть 6, правило 12, параграф 12.6 Комментарий: Поверку датчиков контролирующих основные параметры энергетической установки, электростанции, вспомогательных механизмов и систем, должна выполнять специализированная береговая организация не реже одного раза в 4 года | |
| 19.1.012 | Основные функции судовой ИИС Измерение и контроль основных параметров электро-энергетических систем Автоматическое управление электроэнергетической установкой Система защиты дизель-генераторной установки от перегрузок Литература: Сергеев А.Г., Крохин В.В. Метрология: Учебное пособие для вузов. -М.: ЛОГОС, 2001 Гл. 11. с 290-299 Комментарий: Судовые иноформационно-измерительные системы выполняя функции контроля и измерения основных параметров электроэнергетических систем обеспечивают безвахтенное обслуживание машинного отделения на ходу и стоянке судна | |
| 19.1.013 | Какой блок ИИС обеспечивает преобразование непрерывного сигнала в дискретный? Аналого-цифровой преобразователь Первичный преобразователь Измерительный нормирующий преобразователь Литература: Сергеев А.Г., Крохин В.В. Метрология: Учебное пособие для вузов. -М.: ЛОГОС, 2001 Гл. 11. с 290-323 Комментарий: Одним из основных блоков ИИС является преобразователь аналогового сигнала в код. На судах используется несколько методов преобразования: Время-импульсный метод преобразования Кодо-импульсный метод преобразования Метод интегрирующего преобразования Метод пространственного кодирования Входной сигнал блока - напряжение постоянного тока. Выходной сигнал дискретный в форме двоично-десятичного кода | |
| 19.1.014 | Функции измерительного канала в ИИС Обеспечивает количественную оценку состояния контролируемого объекта с выдачей результата измерения в цифровом виде Формирование светозвуковых сигналов Формирование входного сигнала в унифицированный сигнал Литература: Сергеев А.Г., Крохин В.В. Метрология: Учебное пособие для вузов. -М.: ЛОГОС, 2001 Гл. 2. с 31-56 Комментарий: Измеряемая величина, выдаваемая датчиком, преобразуется из аналоговой в измерительном канале в цифровую. Задача измерительного канала обеспечить достоверность передачи сигнала от датчика к оператору или в компьютер | |
| 19.1.015 | Объект управления имеет переходную характеристику с коэффициентом самовыравнивания Кс ≤ 0. Укажите, какой принцип управления можно использовать для этого объекта Управление по отклонению Управление по возмущению Комбинированное управление Литература: Тимофеев Ю.К. Системы управления судовыми энергетическими процессами. -П.: Судостроение, 1994, 312 с. П. 2.3 Комментарий: Управление по отклонению может быть применено для любых ОУ без ограничений | |
| 19.1.016 | Апериодическое звено первого порядка охватывается инерционной жесткой отрицательной обратной связью. Укажите, как изменится звено или параметры этого звена Уменьшится коэффициент усиления и постоянная времени, при этом появится дополнительное воздействие по производной Звено останется без изменений Значительно уменьшится коэффициент усиления и увеличится постоянная времени Литература: Власенко А.А., Стражмейстер В.А. Судовая электроавтоматика. -М.: Транспорт, 1983, 368 с. Гл.6 Комментарий: При охвате апериодического звена отрицательной инерционной жесткой обратной связью, помимо уменьшения коэффициента и постоянной времени появляется воздействие по производной, как в случае применения пропорционально-дифференцирующего звена. Это обуславливает увеличение быстродействия системы | |
| 19.1.017 | Величина уставки срабатывания средства автоматизации вышла за предел установленного значения. Укажите, какие меры должны быть приняты обслуживающим персоналом Самому выполнить настройку и регулировку Вызвать представителя ремонтной организации и до его прибытия обеспечить работу в ручном режиме Литература: ПТЭ СТС и конструкций РД 31-21.30-97 СПб. ЗАО ЦНИИМФ, 1997, 342 с Комментарий: Величина уставок срабатывания и временных задержек средств автоматизации объектов должна контролироваться ответственными по заведыванию. При обнаружении выхода контролируемых или регулируемых параметров, временных задержек, уставок срабатывания за пределы установленных значений необходимо в возможно короткий срок выполнить настройку и регулировку средств автоматизации | |
| 19.1.018 | Укажите, как часто должна проверяться работоспособность запасных электронных блоков Не реже 1 раза в год Не реже 1 раза в б месяцев Литература: ПТЭ СТС и конструкций РД 31-21.30-97 СПб., ЗАО ЦНИИМФ, 1997, 342 с Комментарий: Запасные электронные блоки, модули и платы необходимо ежегодно устанавливать взамен соответствующих штатных для проверки работоспособности в течение, по крайней мере, нескольких часов | |
| 19.1.019 | Кем и как часто должна производиться проверка датчиков, контролирующих основные параметры электрической установки и электрооборудования судна? Береговыми организациями не реже одного раза в 4 года Специально обученными членами экипажа судна не реже одного раза в год Литература: Правила эксплуатации судовых технических средств и конструкций. РД-31-21.30-97 СПб., ЗАО ЦНИИМФ, 1997, 342 с Комментарий: Проверку датчиков, контролирующих основные параметры энергетической установки, электростанции, вспомогательных механизмов и систем, должна выполнять специализированная береговая организация не реже одного раза в 4 года | |
| 19.1.020 | Объект управления имеет переходную характеристику с коэффициентом саморегулирования Кс > 0. Укажите какой принцип управления можно применить в этом случае, как достаточный? Управление по возмущению Управление по отклонению Комбинированное управление Литература: Тимофеев Ю.К. Системы управления судовыми энергетическими процессами. -П.: Судостроение, 1994, 312 с. п.6.3 Комментарий: В общем случае могут применяться все три принципа, но управление по возмущению возможно только для ОУ с Кс > О | |
| 19.1.021 | Передаточная функция описывается выражением: 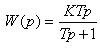 Укажите тип звена и соответствующий ему вид передаточной характеристики Реальное дифференцирующее звено Идеальное дифференцирующее звено Интегродифференцирующее звено Укажите тип звена и соответствующий ему вид передаточной характеристики Реальное дифференцирующее звено Идеальное дифференцирующее звено Интегродифференцирующее звено  Литература: Прохоренков Л.М. и др. Судовая автоматика. -М.: Колос, 1992, 448 с. гп.4-6.13 Комментарий: Тип звена и ПХ соответствуют реальному дифференцирующему звену Литература: Прохоренков Л.М. и др. Судовая автоматика. -М.: Колос, 1992, 448 с. гп.4-6.13 Комментарий: Тип звена и ПХ соответствуют реальному дифференцирующему звену | |
| 19.1.022 | По переходной характеристике рис. 1 определите вид весовой функции на рис. 2 Рис. А Рис. В Рис. С 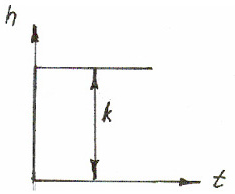 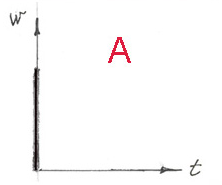   Рис. 1 Рис. 2 Литература: 1. Прохоренков Л.М. и др. Судовая электроавтоматика. -М.: Колос, 1992. 448 с. 2. Ерофеев А.А. Теория автоматического управления. -СПб., Политехника, 2003, 300 с. п.3.2 Комментарий: Импульсная переходная характеристика (функция) системы (звена) называется весовой функцией и представляет собой реакцию системы на единичное импульсное воздействие. С переходной характеристикой весовая функция связана соотношением (1), отсюда следует (2), а весовая функция от этой переходной характеристики будет соответствовать Рис. А Рис. 1 Рис. 2 Литература: 1. Прохоренков Л.М. и др. Судовая электроавтоматика. -М.: Колос, 1992. 448 с. 2. Ерофеев А.А. Теория автоматического управления. -СПб., Политехника, 2003, 300 с. п.3.2 Комментарий: Импульсная переходная характеристика (функция) системы (звена) называется весовой функцией и представляет собой реакцию системы на единичное импульсное воздействие. С переходной характеристикой весовая функция связана соотношением (1), отсюда следует (2), а весовая функция от этой переходной характеристики будет соответствовать Рис. А 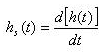 (1) (1)  (2) (2) | |
| 19.1.023 | По переходной характеристике рис. 1 определите вид весовой функции на рис. 2 Рис. А Рис. В Рис. С  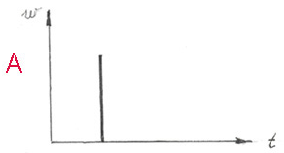 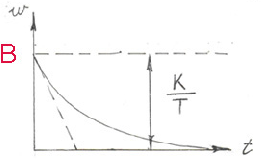 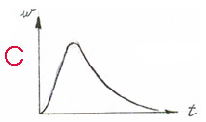 Рис. 1 Рис. 2 Литература: 1.Прохоренков A.M. и др. Судовая электроавтоматика. -М.:Колос, 1992, 448с. 2. Ерофеев А.А. Теория автоматического управления. -М.: Транспорт, 2002, 300с. п.3.2 Комментарий: Импульсная переходная характеристика (функция) системы (звена) называется весовой функцией и представляет собой реакцию системы на единичное импульсное воздействие. С переходной характеристикой весовая функция связана соотношением (1), отсюда следует (2), а весовая функция от этой переходной характеристики будет соответствовать рис. В (1) (2) Рис. 1 Рис. 2 Литература: 1.Прохоренков A.M. и др. Судовая электроавтоматика. -М.:Колос, 1992, 448с. 2. Ерофеев А.А. Теория автоматического управления. -М.: Транспорт, 2002, 300с. п.3.2 Комментарий: Импульсная переходная характеристика (функция) системы (звена) называется весовой функцией и представляет собой реакцию системы на единичное импульсное воздействие. С переходной характеристикой весовая функция связана соотношением (1), отсюда следует (2), а весовая функция от этой переходной характеристики будет соответствовать рис. В (1) (2) | |
| 19.1.024 | Исходная структурная схема имеет вид, представленный на рис.1, укажите, как будет выглядеть эквивалентная структурная схема при переносе сумматора вперед (рис. 2) Рис. А Рис. В Рис. С Литература: Ерофеев А.А. Теория автоматического управления. -СПб., Политехника, 2002, 300с. п.4.3 Комментарий: При переносе сумматора вперед, т.е. по стрелке основного контура в ветвь добавляется звено с ПФ W2 - обойденного звена основного контура. Это правило соответствует рис. А | |
| 19.1.025 | Исходная структурная схема имеет вид, представленный на рис. 1, укажите, как будет выглядеть эквивалентная схема при замене прямой связи на обратную Рис. С | |
| 19.1.026 | Исходная структурная схема имеет вид, представленный на рис. 1. Укажите, как будет выглядеть эквивалентная структурная схема при переходе к единичной обратной связи (рис. 2) Рис. А | |
| 19.1.027 | Имеется два типовых ПИД-регулятора. Один регулятор выполнен на одном ОУ и соответствует рис 1. Второй регулятор использует модульный принцип построения и выполняется на трех ОУ, его функциональная схема соответствует рис 2. Укажите, какой из указанных регуляторов обеспечивает более оптимальный вид переходной характеристики? Рис. 2 | |
| 19.1.028 | Корректирующее звено в качестве типовой электрической схемы использует схему показанную на рис. 1. Укажите, какой вид ЛАЧX соответствуют данной схеме (рис. 2) Рис. 1 | |
| 19.1.029 | Интегрирующее звено охватывается изодромной обратной связью. Укажите, как в этом случае изменится звено или его параметры: В начале переходного процесса такая связь действует как жесткая и превращает звено в безинерционное, в конце переходного процесса она не действует В течении всего переходного процесса звено работает как дифференцирующее Литература: Власенко А.А., Стражпейстер В.А. Судовая электроавтоматика, -М.: Транспорт, 368 с- Гл.6 Комментарии: Для повышения быстродействия систем распространены инерционные гибкие обратные связи, особенно вокруг интегрирующего звена, которые называются изодромными и имеют ПФ (1) 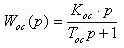 Действие этой ОС в переходном процессе проявляется следующим образом: В начале ПП, когда входная и выходная величины изменяются с большой скоростью, единицей в знаменателе можно пренебречь и ОС действует как жесткая, превращая интегрирующее звено в статическое. В дальнейшем по мере замедления п.п., сигнал на выходе ОС исчезает. В результате интегрирующее звено начинает вести себя как звено без ОС, обеспечивая астатизм системы и, как следствие, устранение установившейся ошибки Действие этой ОС в переходном процессе проявляется следующим образом: В начале ПП, когда входная и выходная величины изменяются с большой скоростью, единицей в знаменателе можно пренебречь и ОС действует как жесткая, превращая интегрирующее звено в статическое. В дальнейшем по мере замедления п.п., сигнал на выходе ОС исчезает. В результате интегрирующее звено начинает вести себя как звено без ОС, обеспечивая астатизм системы и, как следствие, устранение установившейся ошибки | |
| 19.1.030 | Один из широко применяемых способов обработки сигналов в системе автоматического управления (САУ) называется квантованием. Определите, что это такое? Преобразование непрерывного сигнала в дискретный | |
| 19.1.031 | В системе автоматического управления (САУ) информационный сигнал квантуется по уровню. Определите тип системы управления Релейная | |
| 19.1.032 | В регуляторе частоты вращения главного двигателя (ГД) исполнительный механизм (ИМ) перемещающий рейку топливного насоса с постоянной скоростью и представляет собой электродвигатель постоянного тока. Определите передаточную функцию такого ИМ W(p)=k/p | |
| 19.1.033 | Статическая характеристика релейного элемента (РЭ) в регуляторе частоты вращения имеет вид, показанный на рисунке. Как называется такое регулирование? Двухпозиционное | |
| 19.1.034 | На рис. показана структурная схема релейно-импульсного регулятора с исполнительным механизмом (ИМ) постоянной скорости. Укажите, какой закон регулирования (управления) реализуется такой схемой? ПИ-закон | |
| 19.1.035 | Статическая характеристика, показанная на рис., может реализовываться в релейном элементе (РЭ), собранном на операционном усилителе (ОУ). Укажите название такого устройства Однопороговый компаратор с гистерезисом | |
| 19.1.036 | На рисунке показана статическая характеристика с параметрами А и В. Определите название этих параметров А - зона возврата; В - зона нечувствительности А - зона нечувствительности; В - зона возврата А - зона чувствительности; В - зона нечувствительности 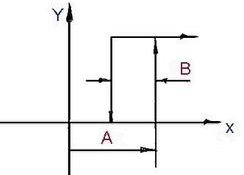 Литература: Тимофеев Ю.К. Системы управления судовыми энергетическими процессами -СПб.: Судостроение, 1994. -311 с, глава 3, п.5 Комментарий: Параметр А называется зоной нечувствительности, параметр В – зоной возврата Литература: Тимофеев Ю.К. Системы управления судовыми энергетическими процессами -СПб.: Судостроение, 1994. -311 с, глава 3, п.5 Комментарий: Параметр А называется зоной нечувствительности, параметр В – зоной возврата | |
| 19.1.037 | В релейном элементе (РЭ) П-регулятора уменьшена зона нечувствительности DНЧ. Как это отразится на работе регулятора? Будут наблюдаться колебания ИМ Уменьшится ход исполнительного механизма (ИМ) Увеличится ход ИМ | |
| 19.1.038 | В релейно-импульсном ПИ-регуляторе, показанном на рисунке, изменен параметр Тос в сторону уменьшения. Укажите, как это отразится на работе регулятора? Увеличится частота кратковременных перемещений исполнительного механизма (ИМ) | |
| 19.1.039 | В релейно-импульсном П-регуляторе увеличена зона возврата D(в. Как это изменение отразится на работе регулятора? Возможны колебания ИМ | |
| 19.1.040 | В регуляторе частоты вращения (РЧВ) используется электронный П-регулятор с коэффициентом усиления Кп=10. На регулируемый орган (РО), таким образом, воздействует усиленный сигнал. К какому типу регулирования по способу воздействия на РО можно отнести такой регулятор? Непрямого действия | |
| 19.1.041 | В РЧВ муфта измерителя воздействует непосредственно на рейку топливного насоса (регулирующий орган). Определите тип регулятора по способу воздействия Регулятор прямого действия | |
| 19.1.042 | Какие свойства переходному процессу придает наличие в регуляторе изодромной обратной связи? Определите тип такого регулятора Астатический регулятор с высоким быстродействием | |
| 19.1.043 | Регулятором частоты вращения малоинерционного длинноходового главного двигателя является цифровой микропроцессорный регулятор. Определите, как отразится на переходной характеристике увеличение разрядности (частоты квантования)? Повысится быстродействие, возможно появление автоколебаний | |
| 19.1.044 | Вольтметр класса точности 2,5 со шкалой измерения от 0 до 400 В, установленный на генераторной панели ГРЩ показывает напряжение 380 В. Максимальная абсолютная погрешность допустимая при измерении напряжения, составляет Плюс-минус 10 В | |
| 19.1.045 | Укажите значение синусоидально изменяющихся электрических величин переменного тока, которые показывают приборы, установленные на ГРЩ Действующее | |
| 19.1.046 | Какая схема выпрямительного преобразователя должна быть использована, чтобы получить среднее значение напряжения синусоидального переменного тока? Схема с двухполупериодным выпрямлением | |
| 19.1.047 | Какие измерительные механизмы используются в выпрямительных приборах? Магнитоэлектрические | |
| 19.1.048 | При каком значении номинального тока в цепи потребителя должны устанавливаться амперметры, согласно требований Российского морского Регистра судоходства? – 20 А и более | |
| 19.1.049 | Для расширения пределов измерения амперметров при измерении постоянного тока в цепях используется Сопротивление шунта | |
| 19.1.050 | Для расширения пределов измерения вольтметров в цепях постоянного тока применяется Сопротивление добавочного резистора | |
| 19.1.051 | Для расширения пределов измерения амперметров при измерении переменного тока в цепях используются Измерительный трансформатор тока | |
| 19.1.052 | Для расширения пределов измерения вольтметров при измерении напряжения переменного тока используются Измерительный трансформатор напряжения | |
| 19.1.053 | К аварийному режиму измерительного трансформатора тока приводит Размыкание цепи вторичной обмотки трансформатора | |
| 19.1.054 | Какой режим работы измерительного трансформатора напряжения является наиболее благоприятным? Режим близкий к холостому ходу во вторичной обмотке трансформатора | |
| 19.1.055 | Электроизмерительные клещи применяются для Измерения тока | |
| 19.1.056 | Как следует включить подвижную катушку электродинамического прибора чтобы его показания были пропорциональны активной мощности? Параллельно приложенному напряжению с последовательно включенным активным сопротивлением в цепь катушки | |
| 19.1.057 | Укажите, в каких случаях нельзя пользоваться методом двух ваттметров для измерения активной мощности в трехфазной цепи В случае трехфазной цепи с нулевым проводом | |
| 19.1.058 | Для измерения сопротивления изоляции судовых цепей используется Мегаомметр | |
| 19.1.059 | Счетчики активной энергии могут быть использованы В цепях синусоидального переменного тока | |
| 19.1.063 | Функции канала контроля ИИС Формирование светозвуковых сигналов при отклонении контролируемых параметров от нормы | |
| 19.1.064 | Первичные преобразователи для измерения температуры с выходом электрического сигнала Терморезисторы и термопары | |
| 19.1.066 | Какой сигнал формируется аналоговой уставкой? Напряжение постоянного тока | |
| 19.1.067 | Для наблюдения за переходными процессами в электрических цепях могут быть использованы Осциллографы | |
| 19.1.069 | Сформулируйте общее условие равновесия мостовой измерительной схемы постоянного тока Отсутствие тока в диагонали указателя | |
| 19.1.070 | Какое значение погрешности положено в основу при определении класса точности электроизмерительных приборов? Максимальное значение приведенной погрешности в процентах | |
| 19.1.071 | Какая погрешность электроизмерительного прибора имеет ту же размерность, что и измеряемая величина? Абсолютная погрешность | |
| 19.1.072 | Какой измерительный механизм может быть использован для измерения синусоидального переменного тока в цепи? Электромагнитный, электродинамический и ферродинамический | |
| 19.1.073 | Какие приборы нашли наибольшее распространение для измерения активной мощности в судовых условиях? Ферродинамические | |
| 19.2.001 | Укажите, в каких устройствах электрических схем автоматизации из числа перечисленных в ответах используются операционные усилители 1. Фильтры 2. Компараторы 3. Усилители постоянного тока | |
| 19.2.002 | Какие датчики температуры используются в судовых энергетических установках? 1. Термоэлектрические преобразователи (термопары) 2. Термоэлектрические преобразователи сопротивления | |
| 19.2.003 | В качестве датчиков частоты в судовых установках используются 1. Индукционные преобразователи 2. Тахогенераторы постоянного тока | |
| 19.2.004 | Какие устройства судовых систем автоматики используются в качестве датчиков угла рассогласования? 1. Сельсины 2. Поворотные трансформаторы | |
| 19.2.005 | Укажите, какие действия должен предпринять вахтенных механик при вводе в действие системы дистанционного управления главного двигателя (ГД) и винта регулируемого шага (ВРШ) 1. Сверить показания электрочасов регистратора маневров с судовым временем 2. Проверить положение совмещенной рукоятки управления ДАУ и машинного телеграфа 3. Проверить возможность передачи управления ГД и ВРШ из ЦПУ в рулевую рубку и обратно 4. Выполнить пробные пуски ГД с помощью системы ДАУ 5. Проверить до пуска ГД возможность изменения положения лопастей ВРШ | |
| 19.2.006 | Укажите, какие действия должен предпринять вахтенный механик при обнаружении неисправности системы ДАУ 1. Немедленно проверить и ввести в действие машинный телеграф 2. По согласованию с вахтенным помощником перейти по управление ГД (ВРШ) из машинного помещения | |
| 19.2.007 | При отключении средств автоматизации судовых технических средств необходимо 1. Получить разрешение старшего механика 2. Поставить в известность вахтенного механика 3. Зафиксировать отключение в машинном журнале | |
| 19.2.008 | Напряжение на элементах систем автоматического управления разрешается измерять 1. Электронным вольтметром 2. Стрелочным вольтметром с высоким входным сопротивлением | |
| 19.2.009 | Признаками неисправности средств автоматической синхронизации генераторных агрегатов являются 1. Значительные броски тока 2. Понижение напряжения судовой сети в момент включения автоматического включателя генератора по команде синхронизатора | |
| 19.2.010 | Регулятор описывается уравнением: U = Kp * e. Укажите каким электрическим схемам соответствует данный регулятор? 1. Рис. A 2. Рис. B | |
| 19.2.011 | САУ с типовым ПИД - регулятором имеет переходную характеристику представленную на рисунке. Как отразится на переходной характеристике увеличение коэффициента передачи П-регулятора 1. Уменьшится время нарастания tн 2. Увеличится время регулирования tp | |
| 19.2.012 | Как отразится на переходной характеристике САУ увеличение в типовом ПИД-регуляторе Д-составляющей 1. Уменьшится колебательность и уменьшится tрег 2. Увеличится перерегулирование d и быстродействие | |
| 19.2.013 | Контрольно-измерительные приборы, применяемые при эксплуатации электрооборудования запрещается использовать, если 1. Стрелка прибора при снятии рабочего импульса не возвращается в исходное положение 2. Истекли сроки поверки 3. Разбито стекло прибора | |
| 19.4.001 | Обозначьте соответствие функциональных схем, показанных на рисунке, фундаментальному принципу построения САУ. 1. Рис. С 2. Рис. А 3. Рис. В 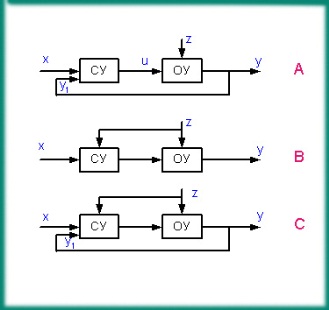 | |
| 19.4.002 | Отнесите переходные характеристики показанные на рисунке к соответствующим объектам управления ОУ (Кс коэффициент самовыравнивания). Кривая 1 Кс > 0 Кривая 2 Кс < 0 Кривая 3 Кс =0 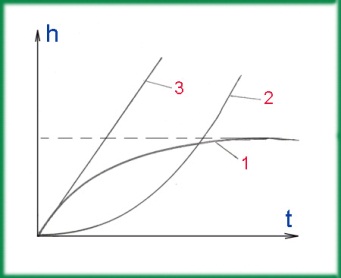 |
Электрические элементы автоматики и САУ. Электроизмерительная техника. ИИС
 2015-03-27
2015-03-27 2272
2272Поделись с друзьями:
|
|
Подборка статей по вашей теме:
- Шлейфы пожарной сигнализации. Соединительные и питающие линии систем пожарной автоматики
- Электрооборудование судов и элементы судовой автоматики
- История факультета автоматики и электромеханики
- Аппаратура и устройства автоматики и телемеханики
- Заземление и гальваническая развязка в системах промышленной автоматики
- Основные правила выполнения электрических схем
- Классификация элементов автоматики
- Релейная защита, электроавтоматика, телемеханика и вторичные цепи
 8295
8295 8021
8021