 2015-03-08
2015-03-08 1856
18561.1 Цель работы
Целью работы является изучение физических основ измерений пространственных характеристик и принципов действия индуктивных и трансформаторных преобразователей, теоретическое и экспериментальное определение их характеристик, а также анализ основных источников погрешности.
1.2 Теоретическая часть
1.2.1 Индуктивные преобразователи
Индуктивные преобразователи нашли широкое применение для преобразования пространственных физических величин (линейных или угловых перемещений) в электрический сигнал.
Принцип работы ИП основан на изменении самоиндукции катушки ( ) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
Схема простейшего ИП приведена на рис. 1а и представляет собой катушку самоиндукции W с ферромагнитным сердечником 1 и якорем 2, отделенным от сердечника воздушным зазором  . Магнитное сопротивление зазора
. Магнитное сопротивление зазора  измениться в результате изменения величины воздушного зазора или его площади поперечного сечения
измениться в результате изменения величины воздушного зазора или его площади поперечного сечения  . Катушка соединена с нагрузкой
. Катушка соединена с нагрузкой  и источником переменного напряжения
и источником переменного напряжения  .
.
Сердечник и якорь изготавливают из магнитомягких материалов с малыми потерями на гистерезис. Для уменьшения потерь на вихревые токи сердечник и якорь набирают из отдельных изолированных друг от друга пластин.

Рис. 1, а. Простейший индуктивный преобразователь
Потери на гистерезис и вихревые токи (потери в стали  ) обуславливают комплексный характер магнитного сопротивления
) обуславливают комплексный характер магнитного сопротивления  .
.
 (1.2.1)
(1.2.1)
где  – активное сопротивление магнитной цепи,
– активное сопротивление магнитной цепи,  – реактивная составляющая магнитного сопротивления.
– реактивная составляющая магнитного сопротивления.
Если пренебречь потоками рассеяния и выпучиванием потока в воздушном зазоре , будет складываться из активного магнитного сопротивления сердечника, якоря
 (1.2.2)
(1.2.2)
и двух воздушных зазоров
 , (1.2.3)
, (1.2.3)
где соответственно –  ,
,  , – длина сердечника, якоря и воздушного зазора в м;
, – длина сердечника, якоря и воздушного зазора в м;
 ,
,  , – сечение сердечника, якоря и воздушного зазора в
, – сечение сердечника, якоря и воздушного зазора в  ;
;
 ,
,  – абсолютная магнитная проницаемость материала сердечника и якоря в Гн/м;
– абсолютная магнитная проницаемость материала сердечника и якоря в Гн/м;
 – магнитная проницаемость вакуума.
– магнитная проницаемость вакуума.
Реактивная составляющая магнитного сопротивления определяется потерями в стали и при отсутствии или слабом проявлении поверхностного эффекта может быть найдена по формуле
 , (1.2.4)
, (1.2.4)
где  – круговая частота питающего напряжения;
– круговая частота питающего напряжения;
Ф – действующее значение магнитного потока.
Индуктивность (коэффициент самоиндукции) катушки также будет комплексной величиной
 , (1.2.5)
, (1.2.5)
где y – потокосцепление;
J – ток катушки;
 – -модуль комплексного магнитного сопротивления.
– -модуль комплексного магнитного сопротивления.
Тогда сопротивление катушки индуктивности
 , (1.2.6)
, (1.2.6)
где  – активное сопротивление обмотки катушки.
– активное сопротивление обмотки катушки.
Из формулы (1.2.6) видно, что учет потерь в стали эквивалентен увеличению потерь в катушке из-за увеличения ее активного сопротивления.
Потери в стали определяются выбранным материалом, конструкцией магнитной цепи, его режимом работы и в ИП должны быть незначительными. Применение магнитопроводов из набора отдельных пластин, материалов магнитопровода с узкой петлей гистерезиса и выбор незначительных рабочих магнитных индукций (0.1÷0.3 Tл) существенно снижают потери в стали.
Для упрощения анализа работы простейшего ИП пренебрежем потерями в стали, магнитным сопротивлением стали  , так как при малых зазорах
, так как при малых зазорах  , Пусть имеем
, Пусть имеем  и
и  , тогда получим, что эффективное значение тока в нагрузке
, тогда получим, что эффективное значение тока в нагрузке
 (1.2.7)
(1.2.7)
линейно зависит от перемещения якоря (d) (пунктирная линия на рис.1б). Реальная ФП (сплошная линия на рис. 1б) отличается от полученной идеализированной в области малых и больших перемещений, что обусловлено пренебрежением и  ,
,  .
.
Простейшие ИП имеют существенные недостатки:
– нереверсивность;
– наличие значительного нулевого сигнала ( );
);
– нелинейность ФП;
– большое тяговое усилие;
– значительный фазовый сдвиг выходного сигнала.
Рис. 1, б. Функция преобразования простейшего ИП
Поэтому они отдельно применяются редко, а являются составной частью дифференциальных конструкций, у которых якорь является общим для обеих половин ИП. Электрические схемы формирования сигнала выполняются по дифференциальной (рис.2, а) или мостовой схемам (рис.2, б).
а
б
Рис. 2. Электрическая схема ИП: а – дифференциальная; б – мостовая
Рассмотрим работу реверсивного ИП, включенного по дифференциальной схеме.
Схема состоит из дифференциального трансформатора Тр1, двух индуктивностей  и
и  простейших ИП, соединенных на общую нагрузку . Входным сигналом является перемещение (
простейших ИП, соединенных на общую нагрузку . Входным сигналом является перемещение ( ) от среднего положения общего якоря.
) от среднего положения общего якоря.
Выходным сигналом является разность токов в нагрузке или падение напряжений на ней.
Определим ФП  , где
, где  , тогда для приведенной схемы имеем
, тогда для приведенной схемы имеем
 (1.2.8)
(1.2.8)
Токи  и
и  определим, используя принцип наложения
определим, используя принцип наложения
 , (1.2.9)
, (1.2.9)
 , (1.2.10)
, (1.2.10)
где  – внутреннее сопротивление источника напряжения, которое принимаем одинаковым для обеих половин дифференциального трансформатора;
– внутреннее сопротивление источника напряжения, которое принимаем одинаковым для обеих половин дифференциального трансформатора;
 ,
,  – сопротивления половин простейших ИП с индуктивностями и .
– сопротивления половин простейших ИП с индуктивностями и .
Подставим (1.2.9) и (1.2.10) в (1.2.8), получим:
 (1.2.11)
(1.2.11)
Обычно внутреннее сопротивление дифференциального источника напряжения гораздо меньше, чем остальные сопротивления рассматриваемой цепи, также и активные составляющие сопротивлений ИП , . Для упрощения расчета, кроме специальных случаев, сопротивление нагрузки выбирают активным, то есть  .
.
Тогда, пренебрегая и считая, что  ,
,  , получим выражение напряжения на нагрузке
, получим выражение напряжения на нагрузке
 (1.2.12)
(1.2.12)
Если пренебречь так же, как и для простейших ИП, потерями в стали, потоками рассеяния и магнитным сопротивлением стали якоря и сердечника, тогда получим в первом приближении индуктивности и .
 ,
,  , (1.2.13)
, (1.2.13)
где  – число витков катушек индуктивности;
– число витков катушек индуктивности;
 – площадь воздушного зазора;
– площадь воздушного зазора;
 – площадь воздушного зазора при
– площадь воздушного зазора при  .
.
Тогда, подставив (1.2.13) в (1.2.12) и проведя преобразования, получим
 (1.2.14)
(1.2.14)
или модуль действующего значения выходного напряжения
 , (1.2.15)
, (1.2.15)
где  – чувствительность дифференциального ИП по напряжению.
– чувствительность дифференциального ИП по напряжению.
Из (1.2.15) видно, что так же, как и для простейшего ИП в первом приближении получили линейную зависимость ФП (рис. 3, пунктирная линия). Реальная ФП (рис. 3, сплошная линия) будет нелинейной при больших значениях входного сигнала по тем же причинам, что и для простейшего ИП, но уже имеет больший линейный участок ФП. Максимальная чувствительность получиться при холостом ходе, т.е.  .
.
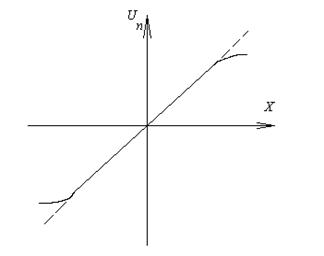
Рис. 3. Функция преобразования дифференциального ИП
Тяговое усилие у дифференциального ИП гораздо меньше, так как представляет разность тяговых усилий простейших ИП. Фаза выходного напряжения изменяется на 180° при переходе через нулевое положение. Практически не удается получить нулевое значение выходного сигнала при среднем положении якоря, т.к. нельзя добиться абсолютной симметрии (геометрической, магнитной, электрической) отдельных простейших ИП. Кроме того, в силу нелинейности кривых намагничивания материалов сердечника и якоря в выходном «нулевом» сигнале будет присутствовать напряжение четных гармоник.
ИП конструктивно выполняются как для преобразования линейного перемещения, так и углового. Различные конструктивные варианты ИП приведены на планшете лабораторного стенда.
1.2.2 Трансформаторные преобразователи
Наибольшее применение в авиационной автоматике нашли трансформаторные преобразователи (ТП), в которых изменения положения подвижного органа, воспринимающего измеряемое перемещение, вызывает изменение взаимной индукции (коэффициента взаимоиндуктивности) между двумя системами обмоток. К одной из них (первичной или обмотки возбуждения) подводиться переменное напряжение питания , а с другой (вторичной или сигнальной) обмотки снимается индуцированное в ней напряжение  , зависящее от коэффициента взаимоиндукции.
, зависящее от коэффициента взаимоиндукции.
Так же, как и ИП, ТП отличается конструктивным разнообразием.
Рассмотрим принцип работы на примере трехстержневого ТП (рис.4), состоящего из подвижного ротора 1, статора 2 с первичной обмоткой  и двумя вторичными обмотками
и двумя вторичными обмотками  , соединенными встречно-последовательно.
, соединенными встречно-последовательно.
Первичная обмотка создает магнитный поток  , составляющие которого
, составляющие которого  и
и  перераспределяются примерно пропорционально площадям перекрытия ротором крайних стержней. Потоки и наводят во вторичных обмотках ЭДС, которые в силу встречного соединения вычитаются, следовательно, в среднем положении ротора и симметричной конструкции выходной сигнал равен нулю. Данный вариант схемы является дифференциальным по напряжению.
перераспределяются примерно пропорционально площадям перекрытия ротором крайних стержней. Потоки и наводят во вторичных обмотках ЭДС, которые в силу встречного соединения вычитаются, следовательно, в среднем положении ротора и симметричной конструкции выходной сигнал равен нулю. Данный вариант схемы является дифференциальным по напряжению.
Эта же схема может быть дифференциальной по току, если подать питание на вторичные обмотки, а сигнал снимать с первичной. В этом случае обмотка будет сцеплена с потоками, направленными встречно в среднем стержне.
Проводимость воздушных зазоров определим без учета краевых потоков (т.е. потоков вне воздушного зазора), воспользовавшись геометрическими размерами ТП (рис.4), тогда
 ,
,
 ,
,  , (1.2.16)
, (1.2.16)
где  – ширина воздушного зазора, одинаковая для всех зазоров.
– ширина воздушного зазора, одинаковая для всех зазоров.
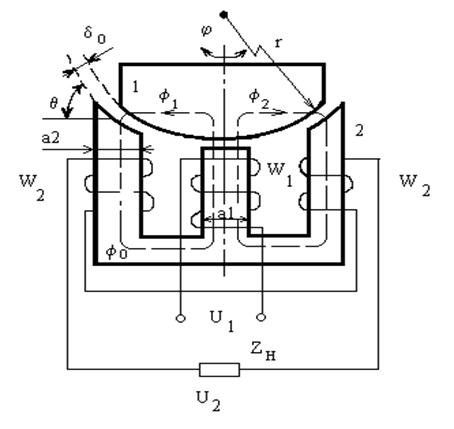
Рис. 4. Трехстержневой трансформаторный преобразователь
Магнитный поток, созданный обмоткой возбуждения, замыкается помимо воздушных зазоров между средним и боковыми стержнями (потоки утечки). В первом приближении можно считать, что проводимость утечки  не зависят от положения ротора.
не зависят от положения ротора.
Если составить для приведенной схемы замещения уравнения для магнитных и электрических контуров, то, решая их, получим выражение для выходного напряжения:

(1.2.17)
где  – относительное изменение входного сигнала в пределах
– относительное изменение входного сигнала в пределах  ;
;
 – реактивное сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся через магнитопровод ротора;
– реактивное сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся через магнитопровод ротора;
 – сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся вне магнитопровода ротора;
– сопротивление, обусловленное потокосцеплением взаимоиндукции, замыкающимся вне магнитопровода ротора;
 ,
,  – приведенные к вторичной обмотке реактивные сопротивления
– приведенные к вторичной обмотке реактивные сопротивления  и
и 
Рассмотренный тип ТП применяется для преобразования углового перемещения в электрический сигнал в пределах 7¸10° и обладает сравнительно линейной ФП в данном диапазоне.
Вследствие значительной краевой проводимости, меняющейся существенно нелинейно от положения ротора, этой конструкции присущ реактивный момент.
Для уменьшения реактивного момента и увеличения чувствительности чаще применяют круглый статор электромашинного типа, имеющий разное количество пазов. Конструктивная схема ТП, по существу включает несколько трехстержневых ТП. По отношению к трехстержневому ТП эта конструкция имеет значительные преимущества, т.к. обладает большой симметрией и меньшей чувствительностью к эксцентриситету ротора, удобством установки в приборы и значительно меньшими реактивными моментами вследствие существенного снижения краевых эффектов.
Для ТП, так же как и для ИП по тем же причинам, не удается получить нулевое значение выходного сигнала при среднем положении ротора. В лучших конструкциях ТП «нулевой» сигнал не превышает несколько десятков милливольт.
Основным преимуществом ТП по сравнению с индуктивным является отсутствие гальванической связи между цепями питания и выхода, а также возможность получения выходного сигнала большей величины, чем питающее напряжение.
ТП, так же как и ИП, представляет собой амплитудные модуляторы, поэтому для уменьшения динамической погрешности частота питающего напряжения должна быть в 10 – 20 раз больше, чем максимально возможная частота изменения входной величины.
Увеличение частоты питающего напряжения позволяет уменьшить как габариты преобразователей, так и реактивный момент (усилия).
1.3 Описание лабораторной установки
Схема лабораторной установки приведена на рис. 5. На передней панели смонтированы исследуемые ИП и ТП. С левой стороны преобразователей приведены их электрические схемы с необходимыми переключениями и клеммами. Переключатели П1 и П3 позволяют включать соответственно сопротивления нагрузок на выходы ИП ( ,
,  кОм) и ТП (
кОм) и ТП ( ,
,  кОм).
кОм).
При среднем положении П1 и П3 нагрузки в выходных цепях преобразователя отключаются. Выключатель В2 служит для отключения одной половины дифференциального ИП с индуктивностями и от дифференциального трансформатора Тр. Клеммы 1, 2 (ИП) и 5, 6 (ТП) служат для включения внешнего вольтметра с большим внутренним сопротивлением ( кОм).
кОм).
Перемещение якоря ИП измеряется микрометром 1. Ротор ТП соединен с ручкой 2, поворот которой контролируется угломером с пределами измерений  10°.
10°.
Цепь питания ИП и ТП состоит из входных клемм ЗГ 3, 4 к которым подается напряжение звукового генератора, контрольного вольтметра 1 и переключателя П2, которым подключается напряжение с ЗГ к дифференциальному трансформатору ИП (положение 1) или ТП (положение 2).
Коэффициент трансформации по напряжению ТР равен
 .
.
Исследуемый ИП дифференциальный и служит для измерения линейных перемещений в диапазоне ±0.4 мм. Отличие его от вышерассмотренной схемы ИП (рис.2а) в том, что для удобства задания линейного перемещения полюса сердечников и якорь выполнены скошенными (рис. 6) и перемещение  задается в плоскости, перпендикулярной плоскости расположения сердечников.
задается в плоскости, перпендикулярной плоскости расположения сердечников.
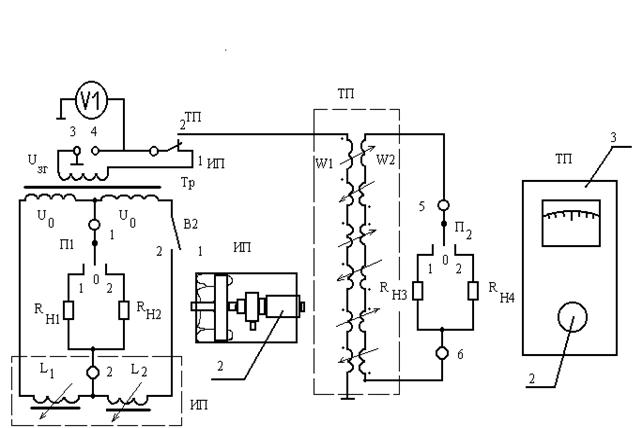
Рис. 5. Схема лабораторной установки
При перемещении якоря на величину воздушный зазор для одной половины ИП уменьшается на величину  , а для другой – увеличивается на эту же величину, тогда соответственно получим приближенные значения сопротивлений воздушных зазоров:
, а для другой – увеличивается на эту же величину, тогда соответственно получим приближенные значения сопротивлений воздушных зазоров:
 (1.3.1)
(1.3.1)
 (1.3.2)
(1.3.2)
где  =0.5 мм – начальный воздушный зазор;
=0.5 мм – начальный воздушный зазор;
a=45° – угол скоса сердечника и якоря;
 =5 мм – длина воздушного зазора;
=5 мм – длина воздушного зазора;
 =8 мм – ширина воздушного зазора.
=8 мм – ширина воздушного зазора.
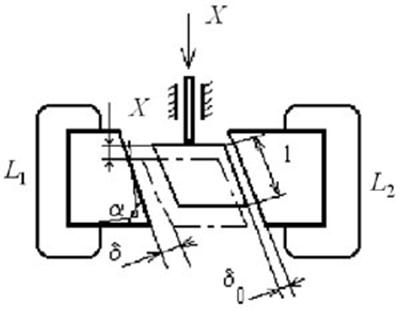
Рис.6. Схема воздушного зазора ТП
Число витков индуктивностей и равно 1200 виткам. Исследуемый ТП электромашинного типа с 12-полюсным статором и 6-полюсным ротором. Данный тип ТП представляет совокупность 6-трехстержневых ТП, у которых крайние стержни общие, а, следовательно, и выходные обмотки. Из-за совмещения стержней и выходных обмоток сокращается их число на 1/3 и схема становиться дифференциальной по току и напряжению.
1.4 Порядок выполнения лабораторной работы
1. Изучить принцип действий ИП, ТП и ознакомиться с заданием лабораторной установкой. Зарисовать магнитные цепи исследуемых ИП и ТП, подготовить таблицы для экспериментальных ФП.
2. Включить в сеть ~220 В звуковой генератор, вольтметр к клеммам 1, 2 дать им прогреться 2-3 минуты.
3. Исследование ИП (Переключатель П2 в положение 1)
а) Определение ФП дифференциального ИП при номинальных условиях ( =10 В,
=10 В,  =400 Гц):
=400 Гц):
– включить тумблером В2 вторую половину ИП
– установить якорь в среднее положение по минимальному значению  ;
;
– перемещая якорь вправо, затем влево от среднего положения, снять ФП для обеих ветвей, при этом перемещение якоря влево от среднего положения изменяет фазу выходного напряжения на 180°.
Измерения производить при значениях нагрузки:  кОм,
кОм,  кОм, .
кОм, .
б) Определение реальной ФП дифференциального ИП при отклонениях напряжения питания, частоты и нагрузки от номинальных значений на величину DU=-2 В; Df=50 Гц:
– установить  ,
,  =400 Гц,
=400 Гц,  кОм и снять ФП;
кОм и снять ФП;
– установить  , =450 Гц, кОм и снять ФП;
, =450 Гц, кОм и снять ФП;
4. Исследование дифференциального ТП (переключатель П2 в положении 2).
а) Определение номинальной и реальной ФП ТП;
– включить вольтметр к клеммам 5, 6;
– номинальную и реальную ФП определить по методике в п.п. 3. согласно заданию, при этом учесть, что номинальное значение сопротивления нагрузки для ТП кОм, напряжение  , а отклонение частоты D =50 ГЦ, напряжения
, а отклонение частоты D =50 ГЦ, напряжения  ;
;
б) Определения зависимости чувствительности ТП от частоты питающего напряжения:
– установить номинальные значения напряжения и нагрузки;
– отклонить ротор ТП ручкой 2 (рис.5) от среднего положения (в любую сторону) на 5÷6°;
– изменяя частоту питающего напряжения от 250 до 800 Гц, через 50 Гц замерить выходные напряжения, при этом поддерживать постоянной  ;
;
– определить чувствительность ТП для замеренных значений напряжений.
5. Определение величины и формы нулевого сигнала:
– включить осциллограф в сеть ~220 В, откалибровать его;
–включить выходы дифференциального ИП и ТП ко входу осциллографа, определить величину и форму нулевого сигнала при номинальных значениях  , , .
, , .
6. Выключить приборы и лабораторную установку.
1.5 Требования к отчету
Отчет должен содержать:
1. цель работы;
2. схему установки;
3. результаты измерений, занесенные в таблицу;
4. графики, построенные по результатам измерений;
5. выводы.
1.6 Контрольные вопросы
1. Какой характер имеют погрешности у ИП и ТП при изменении напряжения питания, частоты?
2. Почему изменяются ФП у ИП, ТП при изменении сопротивления нагрузки?
3. Почему появляется нелинейность у ИП, ТП при больших входных сигналах?
4. Как уменьшить «нулевые» сигналы у ИП, ТП?
5. Чем объяснить изменение чувствительности у ТП при изменении частоты питающего напряжения?

