 2015-03-08
2015-03-08 561
5613.2.1 Общие сведения о моментных преобразователях
Моментные преобразователи являются исполнительными элементами, создающими необходимые моменты в измерительных устройствах, построенных по уравновешивающей схеме. Наибольшее распространение моментные преобразователи нашли в гироскопических устройствах, в которых их часто называют моментными датчиками (в системах коррекции гироприбора) или стабилизирующими двигателями (в гиростабилизаторах).
Моментные преобразователи подразделяются на электрические и пневмогидравлические. Электрические, в свою очередь, можно разделить на электромагнитные, магнитоэлектрические, ферродинамические и индукционные.
Наибольшее применение нашли магнитоэлектрические и индукционные моментные преобразователи, обладавшие большой линейностью и стабильностью характеристик. Так же как и управляемые электродвигатели, моментные преобразователи работают в заторможенном режиме, но отличаются тем, что имеют ограниченный угол поворота (кроме индукционных) и должны обеспечивать длительную работоспособность с допустимым значением перегрева при максимальном входном сигнале.
3.2.2 Магнитоэлектрические моментные преобразователи
В магнитоэлектрических моментных преобразователях вращающий момент создается в результате взаимодействия магнитного поля постоянного магнита с магнитным полем катушки созданным управляющим током.
Преобразователи выполняются как с подвижной катушкой, так и с подвижным магнитом.
В преобразователях первой разновидности подвижная катушка располагается в зазоре между магнитом и магнитопроводом, которые неподвижны. Магнитопровод служит для уменьшения сопротивления магнитной цепи, тем самым увеличивается магнитная индукция в зазоре, следовательно, и чувствительность преобразователя. В случае внешнего расположения магнитопровода (рис. 1а) выполняет роль экрана, который предохраняет преобразователь от влияния внешних
постоянных полей.
Рис. 1 Схема внешнего (а) и внутреннего (б) расположения магнитопроводов
Конструктивная схема с подвижным магнитом не отличается от схемы с подвижной катушкой, при этом подвижным может быть только магнит или магнит с экраном (рис.2).
Рис.2 Схема с подвижным магнитом
С целью повышения чувствительности преобразователя увеличивают число пар полюсов магнита и соответственно число пар катушек. На рис. 3а показана конструктивная схема преобразователя с тремя парами полюсов, а на рис. 3б - электрическая схема одного из вариантов соединения катушек обмотки.
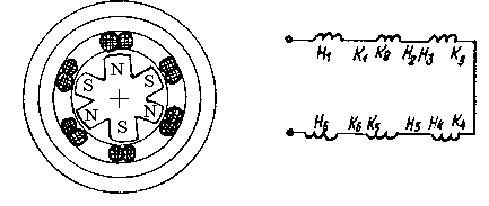
а) б)
Рис.3 Схема моментного преобразователя
Катушки выполняются бескаркасными и приклеиваются к поверхности цилиндра (рис. 3а) или сектора (рис. 2) из легко магнитного материала. Цилиндр (сектор) одновременно выполняет в этом случае и роль демпфера. Иногда изготовляют обмотку и без металлического цилиндра, катушки в этом случае заливают эпоксидной смолой и они образуют цилиндрическую поверхность.
Для определения ФП, представляющей зависимость между управляемым током и выходным моментом, воспользуемся законом электромагнитного взаимодействия. Сила взаимодействия между магнитом и проводником с током, расположенным перпендикулярно магнитному полю, равна:
 (1.2.1)
(1.2.1)
где В – магнитная индукция;
L – активная длина проводника (т.е. длина проводника, находящегося в основном потоке постоянного магнита);
I – сила тока.
В приведенных конструктивных схемах обе противоположные стороны катушек являются активными, следовательно, вращающий момент определится следующим выражением:
 (1.2.2)
(1.2.2)
где W – число витков катушки;
n – количество катушек обмотки;
 – среднее расстояние от оси вращения до активной стороны витка.
– среднее расстояние от оси вращения до активной стороны витка.
Из полученного выражения момента видно, что при постоянной индукции во всех точках зазора имеем линейную ФП и чувствительность S:
 (1.2.3)
(1.2.3)
Чувствительность не зависит от углового положения ротора относительно статора.
Практически удается получить постоянство индукции только в ограниченном диапазоне углов, при этом для системы с внешним магнитом этот угол получается большим, чем с внутренним.
Неоднородность индукции в зазоре объясняется не только ограниченными размерами полюсов, но и эксцентриситетом, технологическими отклонениями формы магнита и магнитопровода от цилиндрической, магнитной неоднородностью магнитопровода. При подвижном магните в этом случае появляется «нулевой» момент (возникающий при нулевом входном сигнале), так как сопротивление магнитной цепи будет зависеть от углового положения магнита относительно неподвижного магнитопровода. «Нулевой» момент при подвижном магните возникает также из-за остаточной намагниченности магнитопровода. Поэтому для уменьшения «нулевого» момента целесообразно делать подвижным магнит с магнитопроводом. В тех случаях, когда необходимо иметь подвижную часть малоинерционной, ее выполняют с подвижными катушками. Здесь также может возникнуть «нулевой» момент из-за гибких токопроводов.
3.2.3 Индукционные моментные преобразователи
Индукционные моментные преобразователи представляют собой двухфазные асинхронные двигатели с короткозамкнутым ротором, работающие в заторможенном режиме и имеющие много общего с управляемым асинхронным двигателем. Отличие от управляемых асинхронных двигателей определяется тем, что моментные преобразователи в основном работают без редукторов и поэтому не имеют подшипниковых узлов, а выполняются в виде двух разделенных частей: статора и ротора, которые закрепляются на неподвижные и подвижные части измерительного устройства, например, гироскопического.
На статоре преобразователя располагаются две смещенные в пространстве на 90 градусов обмотки возбуждения ( ) и управления (
) и управления ( ) (рис 4).
) (рис 4).
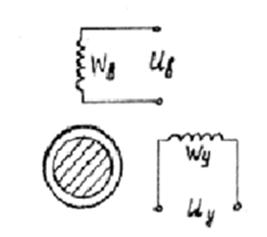
Рис. 4 Схема моментного индукционного преобразователя
Ротор преобразователя выполняется в виде немагнитного полого стакана (рис. 5а) или диска, либо обмедненного ферромагнитного цилиндра. В этом случае получается наибольшая его электрическая симметрия и уменьшается «нулевой момент».
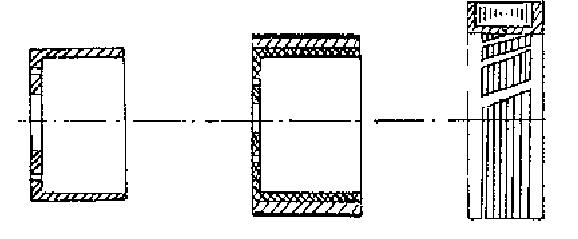
а) б) в)
Рис. 5 Различные варианты роторов МП
Для увеличения чувствительности иногда применяют ротор типа беличья клетка, выполненный как и у обыкновенных асинхронных двигателей из шихтованной стали, но при этом для уменьшения «нулевого момента» обмотки ротора должны иметь сравнительно большое активное сопротивление.
Обмотка возбуждения во время работы постоянно подключена к источнику переменного напряжения с номинальным действующим значением  , а на обмотку управления подается управляющее напряжение
, а на обмотку управления подается управляющее напряжение  , которое сдвинуто по фазе на некоторый угол
, которое сдвинуто по фазе на некоторый угол  по отношению к напряжению возбуждения.
по отношению к напряжению возбуждения.
В результате этого обмотки образуют элептически вращающееся магнитное поле, которое при взаимодействии с коротко замкнутым ротором создает вращающий момент.
Величина момента при насыщенной магнитной системе определяется по формуле:
 (1.2.4)
(1.2.4)
где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
Обозначим через  момент при круговом поле
момент при круговом поле
( ;
;  ),
),
тогда:
 (1.2.5)
(1.2.5)
где  ,
,  – коэффициент управления
– коэффициент управления
Номинальный момент преобразователя  при круговом вращающемся магнитном поле (рис. 4б) находится из выражения:
при круговом вращающемся магнитном поле (рис. 4б) находится из выражения:
 (1.2.6)
(1.2.6)
где m – количество фаз питающего напряжения;
p – число пар полюсов статора;
 – частота питающего напряжения;
– частота питающего напряжения;
 – ток в цепи эквивалентной схемы при круговом поле;
– ток в цепи эквивалентной схемы при круговом поле;
 ,
,  – эквивалентное сопротивление контуров намагничивания и ротора.
– эквивалентное сопротивление контуров намагничивания и ротора.
Индукционные магнитные преобразователи нашли широкое применение в связи с их достоинствами; возможностью получения независимости величины момента от положения ротора в пределах одного оборота, что недостижимо для преобразователей других типов; хорошей линейностью ФП.
Рис. 6 Функция преобразования МП
Основные недостатки индукционных преобразователей – невысокое значение выходного момента, особенно с немагнитным ротором, и трудность обеспечения достаточно малого «нулевого момента».
Так как моментные преобразователи работают в заторможенном режиме, основными причинами, вызывающими «нулевой момент», являются паразитные короткозамкнутые витки в магнитопроводе. Вследствие этого поток возбуждения получает дополнительный фазовый сдвиг, приводящий к образованию вращающегося магнитного поля, т.е. «нулевого момента»
Выполнение ротора с большим активным сопротивлением позволяет повысить электрическую симметрию преобразователя, следовательно, несколько уменьшает и «нулевой момент», но при этом уменьшается и его чувствительность. Для уменьшения «нулевого момента» необходима тщательная сборка магнитопровода.
В исполнительных асинхронных двигателях роторы также выполняются с повышенным активным сопротивлением. Это делается с целью устранения самохода двигателя, т.к. исполнительные двигатели должны быть управляемыми и при отсутствии входного сигнала (при включенной обмотке возбуждения) двигатель должен остановиться.
В точных моментных преобразователях для повышения температурной стабильности, чувствительности используется токопроводящее покрытие ротора металлом с малым коэффициентом сопротивления, например, манганином, но такое покрытие по сравнению с медным снижает чувствительность преобразователя. Иногда для той же цели применяют схемные методы.








