 2015-03-20
2015-03-20 1294
1294Для лучшего понимания принципа действия асинхронного двигателя вначале примем, что его вращающееся поле создается путем вращения двух полюсов (постоянных магнитов или электромагнитов), как показано на рисунке 2.5.
В проводниках замкнутой обмотки ротора при этом будут наводиться токи. Их направления указаны на рисунке 2.5. Они найдены по правилу правой руки, позволяющему определить направление наведенного тока в проводнике, перемещающемся относительно поля. Пользуясь правилом левой руки, найдем направления электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться в направлении вращения поля. Его частота вращения п2, об/мин, будет меньше частоты вращения поля n1, об/мин, так как только в этом случае возможны наведение токов в обмотке ротора и возникновение электромагнитных сил и вращающего момента.
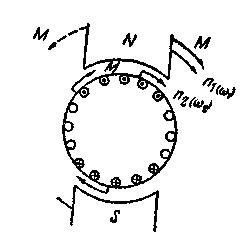
Рис. 2.5. К пояснению принципа действия асинхронного двигателя
Частота вращения поля n1 называется синхронной частотой вращения.
Скорость поля относительно ротора (n1 – n2) называется частотой скольжения, а отношение этой частоты к частоте поля, обозначаемое через s:
 (2.1)
(2.1)
называется скольжением.
Обозначим через М вращающий момент, который нужно приложить к полюсам (рис. 2.5), чтобы вращать их c частотой n1, об/мин, или с угловой частотой, рад/с:
 (2.2)
(2.2)
Тогда мощность, необходимая для вращения полюсов:
 (2.3)
(2.3)
На ротор и полюсы действуют одинаковые электромагнитные силы (действие равно противодействию). Они создают одинаковые вращающие моменты, а так как момент, действующий на полюсы (на рисунке 2.5 показан пунктирной стрелкой), равен М, той и на ротор действует момент М. Следовательно, механическая мощность, развиваемая ротором:
 (2.4)
(2.4)
где w - угловая частота ротора, рад/с:
 (2.5)
(2.5)
При работе машины двигателем  <
<  , так как ω2< ω1.
, так как ω2< ω1.
Можно считать, что разность мощностей и  равна только электрическим потерям в обмотке ротора, имеющей m2 фаз при токе в фазе I2 и ее активном сопротивлении r2, так как потерями в стали ротора, как будет показано, можно пренебречь:
равна только электрическим потерям в обмотке ротора, имеющей m2 фаз при токе в фазе I2 и ее активном сопротивлении r2, так как потерями в стали ротора, как будет показано, можно пренебречь:
 (2.6)
(2.6)
Мощность РЭМ передается вращающимся полем ротору. Она называется электромагнитной мощностью или мощностью вращающегося поля.
В реальной асинхронной машине, работающей двигателем, электромагнитная мощность РЭМ равна первичной мощности Р1, подведенной к статору, за вычетом РЭ1 электрических потерь в обмотке статора:
 (2.7)
(2.7)
где m1— число фаз;
I1 — ток в фазе обмотки статора, А;
r1 — активное сопротивление, Ом;
и потерь в стали статора Pc1, т. е:
 (2.8)
(2.8)
Механическая мощность на валу двигателя P2 (полезная мощность) меньше механической мощности , развиваемой ротором. Чтобы получить Р2, нужно вычесть из механические потери PМЕХ на трение в подшипниках и вращающихся частей о воздух, потери РСД в зубцах статора и ротора, вызываемые пульсациями поля в них, и небольшие добавочные потери PДОБ, возникающие при нагрузке и вызываемые полями рассеяния статора и ротора:
 (2.9)
(2.9)
Наглядное представление о распределении мощностей в асинхронном двигателе дает его энергетическая диаграмма, приведенная на рисунке 2.6.
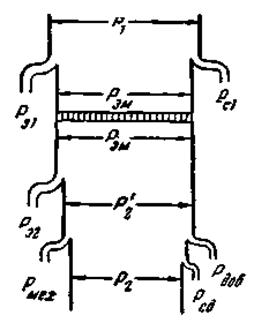
Рис. 2.6. Энергетическая диаграмма асинхронного двигателя
Она соответствует уравнениям (2.8) и (2.9).
Из написанных ранее соотношений следует:
 (2.10)
(2.10)
так как
(В равенствах  угловая механическая скорость является постоянной при f1 = const; поэтому PЭМ
угловая механическая скорость является постоянной при f1 = const; поэтому PЭМ  M, что дало повод назвать величину РЭМ «моментом в синхронных ваттах».)
M, что дало повод назвать величину РЭМ «моментом в синхронных ваттах».)
Из (2.10) получаем:
 (2.11)
(2.11)
или
 (2.12)
(2.12)
Если скольжение выразить в процентах, то можно написать, что s% от мощности PЭМ, полученной ротором от статора посредством вращающегося поля, расходуется в обмотке ротора на электрические потери, а оставшаяся часть, равная (1-s)100% от PЭМ, преобразуется в механическую мощность (2.11), развиваемую ротором. Поэтому асинхронные двигатели выполняются таким образом, чтобы их скольжение было невелико. Оно для нормальных двигателей мощностью от 1 до 1000 кВт при их номинальной нагрузке составляет приблизительно 6  1%; при больших мощностях обычно s<l%.
1%; при больших мощностях обычно s<l%.
Частота вращения поля (синхронная частота) определяется:
 (2.13)
(2.13)
где f — частота тока статора, Гц;
р — число пар полюсов его обмотки.
При стандартной в России частоте f = 50 Гц синхронные частоты вращения для различных чисел полюсов имеют значения, приведенные в таблице 2.1.
Таблица 2.1
| 2p | ||||||
| n1 |
Частота вращения ротора, об/мин:
 (2.14)
(2.14)
Номинальная частота вращения n2н, получающаяся при номинальной нагрузке на валу, указывается на щитке двигателя. Она в обычных случаях позволяет определить синхронную частоту вращения, число полюсов двигателя и его номинальное скольжение sн.
Например, на щитке двигателя, предназначенного для работы при частоте тока f1=50 Гц, указана частота вращения n2н = 730 об/мин. Ближайшая синхронная частота вращения равна 750 об/мин (табл. 2.1), чему соответствует число полюсов 2р = 8.
Скольжение:
При работе машины в обмотке ее ротора наводится ЭДС:
 (2.15)
(2.15)
где w2 и k02 — число витков и обмоточный коэффициент обмотки ротора;
f2— частота ЭДС и тока в обмотке ротора:
 (2.16)
(2.16)
. С такой же частотой будет перемагничиваться сталь ротора. При работе машины двигателем частота f2 мала (при f1=50 Гц f2=0,5…3 Гц), поэтому магнитными потерями в стали ротора можно пренебречь, что и было сделано при построении энергетической диаграммы на рисунке 2.6.

