 2015-03-20
2015-03-20 363
363При выводе уравнений для статических характеристик двигателя примем следующие допущения: реакция якоря не учитывается; момент на валу двигателя равен электромагнитному моменту. Тогда уравнения для напряжения, ЭДС якоря и электромагнитного момента будут иметь вид
| U = E + IR; (4.1) Е = кФω; (4.2) М= кФI, (4.3) где R = RЯ + RД - полное сопротивление цепи якоря, Ом; Ф - магнитный поток, Вб; U- подводимое к якорю напряжение, В; к =pNl(2πa) - конструктивный коэффициент двигателя; р - число пар полюсов; N -число активных проводников обмотки якоря; а - число параллельных ветвей обмотки якоря. Подставляя (4.2) в (4.1), получим формулу для электромеханической характеристики ω(I): ω = (U – IR)/(kФ). (4.4) | 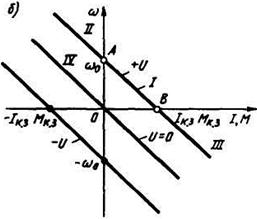
|
В соответствии с (4.4) электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости (далее скорости) от тока и момента, вид которых для разных полярностей питающего якорь напряжения показан на рис. 4.1, б.
Характерными точки А холостого хода, в которой ω = ω0, а I = М = 0, и точка В короткого замыкания, где ω = 0, а / = /кз и М = Мкз. Отметим, что режим короткого замыкания для электрической машины соответствует неподвижному состоянию якоря при поданном на двигатель напряжении, а не замыканию его электрических цепей между собой или на корпус. Режим короткого замыкания называется также пусковым режимом, поскольку является начальным при включении (пуске) двигателя.
Уравнения (4.4) и (4.5) можно записать в сокращенной форме:
ω = ω0 - ∆ω,
где ωо - скорость идеального холостого хода двигателя,
ω0 = U/(кФ);
∆ω - изменение угловой скорости относительно скорости идеального холостого хода,
∆ω = IR/(кФ) = МR/(кФ)2.
На рис. 4.1,6 показана также характеристика ДПТНВ, уравнения которой получают из (4.4) и (4.5) при U = 0:
ω = -IR/(кФ);
ω = -МR/(кФ)2.
Зависимости ω (I) и ω (M) при U = 0 также являются линейными.








