 2015-03-20
2015-03-20 5747
5747Частотный способ является одним из наиболее перспективных и широко используемых в настоящее время способов регулирования скорости АД. Принцип его заключается в том, что, изменяя частоту f1 питающего АД напряжения, можно в соответствии с выражением ω0 = 2πf1/p изменять его синхронную скорость ω0, получая тем самым различные искусственные характеристики. Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании. Поэтому при этом способе регулирования потери скольжения, определяемые по (4.15), оказываются небольшими, в связи с чем частотный способ наиболее экономичен.
Для лучшего использования АД и получения высоких энергетических показателей его работы — коэффициентов мощности, полезного действия, перегрузочной способности - одновременно с изменением частоты питающего напряжения необходимо изменять и значение этого напряжения. Закон изменения напряжения при этом зависит от характера момента нагрузки.
|
|
|
При выборе соотношения между частотой и напряжением, подводимым к статору АД, часто исходят из условия сохранения его перегрузочной способности λ, которая определяется отношением критического момента двигателя Мк к моменту нагрузки Мс,
λ = МК / МС = const, (4.28)
Если пренебречь активным сопротивлением статора и учесть, что xK ~ f1 и ω0 ~ f1, тоэто выражение можно записать как:
 (4.29)
(4.29)
где А — постоянная, не зависящая от f1.
Из (4.29) следует, что для любых двух значений частоты f1i и f1k должно соблюдаться следующее соотношение:
 (4.30)
(4.30)
где МCi, MCk - моменты нагрузки при скоростях АД, соответствующих частотам f1i и f1k.
Отсюда следует основной закон изменения напряжения при частотном способе регулирования скорости АД:
 (4.31)
(4.31)
С помощью выражения (4.31) могут быть получены частные законы изменения напряжения и частоты при различных зависимостях момента нагрузки Мс от скорости.
При постоянном моменте нагрузки Mc = const, при этом согласно (4.31)
UФ / f1 = const, (4.32)
т. е. напряжение на статоре должно изменяться пропорционально его частоте.
На рис. 4.18, а приведены механические характеристики АД при выполнении соотношения (4.32). Для частот ниже номинальной (f1i < fНОМ) критический момент АД постоянен, что обеспечивает неизменную перегрузочную способ-
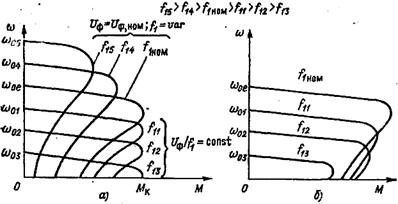
Рис. 4.18. Механические характеристики при частотном регулировании
координат АД: а — расчетные, б — практические
ность двигателя. При частотах выше номинальной (f1i > fНОМ), когда по техническим условиям напряжение на статоре не может быть повышено сверх номинального, критический момент АД снижается.
|
|
|
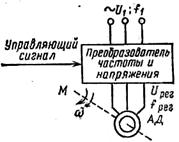
Рис. 4.19. Схема асинхронного электропривода при частотном регулировании

