 2015-06-05
2015-06-05 21909
21909
Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
· напряжения подаваемого на статор,
· вспомогательного сопротивления цепи ротора,
· числа пар полюсов,
· частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
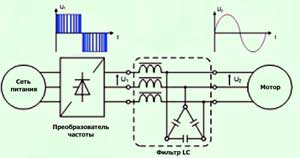
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
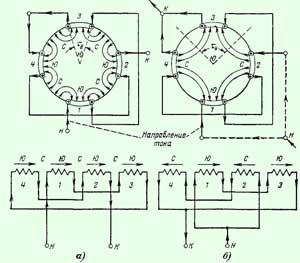
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
· укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
· применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2: 1 = р2: pt, 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2: 1 = Рг: Pi, 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
3. Схема нереверсивного управления пуском трехфазного асинхронного двигателя с фазным ротором.
http://www.ngpedia.ru/pngs/016/0166rYE3L7C0J713C9B4.png\
3) три реле времени /РВ, 2PS и ЗРВ маятникового типа, механически сочлененные соответственно с контакторами К, /У и 2У;
4) кнопки «стоп» и «пуск».
В исходном положении, когда двигатель отключен, все контакторы выключены и в цепь каждой фазы ротора включено суммарное сопротивление гр\ + rp2 + грз всех трех ступеней пускового реостата. При нажатии кнопки «пуск» замыкается цепь катушки контактора К, контактор срабатывает и начинается первый этап пуска двигателя при полном сопротивлении в цепи ротора. Контактор К, срабатывая, приводит в действие механически сочлененное с ним реле времени IP В. Спустя /) секунд это реле замкнет свой контакт в цепи включающей катушки контактора /У.
Контактор 1У срабатывает, и в цепи ротора двигателя останутся включенными сопротивления гр2 + г„3 двух ступеней реостата. Этим начинается второй этап пуска двигателя. Контактор /У приведет в действие сочлененное с ним реле 2РВ, которое через 12 секунд замкнет свой контакт в цепи катушки контактора 2У. Контактор 2У сработает и выключит вторую ступень реостата. В цепи ротора останется включенным только сопротивление грз- Контактор 2У приведет в действие реле ЗРВ и спустя ta секунд замкнется цепь катушки контактора ЗУ. Последний сработает и замкнет обмотки ротора двигателя накоротко, чем и будет завершен процесс пуска двигателя.
При отключении двигателя надо нажать кнопку «стоп». При этом потеряют питание катушки контакторов К, /У, 2У и ЗУ. Контакторы отключатся и вся схема возвратится в исходное положение.
Выше были рассмотрены относительно простые схемы управления асинхронными двигателями. На практике применяются также более сложные схемы, позволяющие управлять процессом пуска, торможения, регулирования и стабилизации скорости электроприводов с двигателями постоянного и переменного тока.
Рис. 18 8. Схема управления пуском нереверсивного асинхронного двигателя с фазным ротором
4. Внутренние РУ
Распределительное устройство (РУ) — электроустановка, служащая для приёма и распределения электрической энергии одного класса напряжения.
Распределительное устройство содержит набор коммутационных аппаратов, вспомогательные устройства РЗиА и средства учёта и измерения

