 2015-04-12
2015-04-12 1383
1383Резистивный измерительный преобразователь преобразует координату положения перемещаемого объекта в электрическое сопротивление, вносимое преобразователем в электрическую цепь. Применяют проволочные и пленочные преобразователи.
На каркасе цилиндрической или кольцевой формы (рис. 8.3а и рис. 8.3б) уложена обмотка из витки проволоки, по которым скользит подвижная деталь электрического контакта – щетка движка. Вместо витков проволоки может использоваться пленочное покрытие из проводникового или полупроводникового материала.
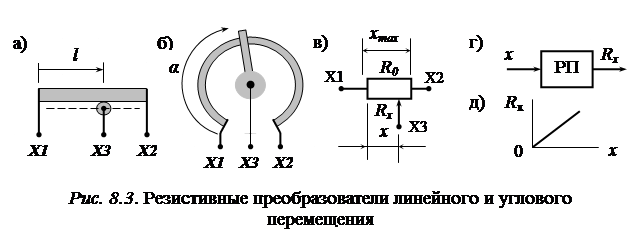
Линейное перемещение l движка (рис. 8.3а), или угловое перемещение – угол поворота α (рис. 8.3б), характеризуемые координатой x, вызывают изменение сопротивления Rx между клеммами Х1 и Х3 (рис. 8.3в). Если каркас имеет одинаковое сечение по всей длине, витки обмотки уложены равномерно по каркасу и сопротивление обмотки равно R0, то Rx= (R0 / xmax). x. Таким образом, при выполнении указанных условий сопротивление Rx резистивного преобразователя (РП на рис. 8.3г) линейно зависит от перемещения движка x (рис. 8.3б).
Резистивный преобразователь используют в потенциометрическом датчике (ПД на рис. 8.4а), выходной переменной которого является электрическое напряжение Ux.
 |
Схема простейшего датчика представлена на рис. 8.4б. Если сопротивление нагрузки (приемника сигнала), подключенной к выходу датчика, велико, то, характеристика управления близка к линейной зависимости
 , 0 ≤ x ≤ xmax,
, 0 ≤ x ≤ xmax,
где x max - максимальное значение входной переменной x (x = l для датчика линейного перемещения, x = α для датчика углового перемещения). Напряжение питания U0 должно быть стабильным, т. к. его флюктуации вызывают погрешности преобразования х→Ux.
Датчик, представленный схемой на рис. 8.4в, реагирует на знак входного сигнала. При постоянном напряжении питания U0 напряжение Ux на выходе датчика изменяет полярность при переходе подвижной детали контакта (ползунка) через среднее положение.
В схеме на рис. 8.4г предусматривается синхронное перемещение ползунков контактов относительно среднего положения (отмечено пунктирной линией). Если левый ползунок перемещается относительно среднего положения вниз на величину х, то правый ползунок поднимается вверх также на величину х. Чувствительность (крутизна характеристики управления) такого двухтактного датчика в два раза выше чувствительности однотактного датчика на рис. 8.3в).
Характеристика управления потенциометрического датчика приближается к линейной при больших значениях β=RH /R0 , где RH - активное сопротивление нагрузки, R0 - полное сопротивление потенциометра. При β =10…100 нелинейность характеристики составляет 3…0,1% соответственно. Чувствительность S=dUx / dx= (3…5).10-3 В/мм.
Путем соответствующего профилирования каркаса резистивного преобразователя можно получить различные по виду нелинейные зависимости Ux от x.
Минимальная погрешность проволочных датчиков 0,05%; их недостаток – ступенчатость характеристики управления из-за дискретного изменения сопротивления Rx при перемещении щетки движка. Класс точности пленочных потенциометров достигает 0,01%.Для обеспечения стабильности работы датчики должны иметь сопротивление R0, превышающее 1000 Ом.
В табл. 8.1 приведены технические характеристики некоторых потенциометрических датчиков угла поворота.
| Технические характеристики потенциометрических датчиков угла поворота Таблица 8.1. | |||||
| Характеристики | Тип потенциометрического датчика | ||||
| ПД | ПП | ПК | П-1 | П-63 | |
| Рабочий диапазон, град Чувствительность, В/град Напряжение питания U0, В Ступенчатость, виток/град Сопротивление, кОм | 0,08 1-3 | 0,08 1-3 | >360 0,1 - 2,6 1,6 | ±27 2,5 - - | ±10 1,5 - |

