 2015-04-12
2015-04-12 1153
1153В этом разделе рассматриваются аппараты, которые относят к информационным устройствам электроприводов и систем автоматики. Измерительные преобразователи и датчики используются в системах управления для получения информации по обратным связям о результатах управления, а также о внешней среде.
Измерительный преобразователь 1 – это техническое устройство, которое применяют для преобразования некоторой физической величины (силы, давления, температуры и т. д.) в другую функционально с ней связанную физическую величину (электрическое сопротивление, угол поворота, электрическое напряжение или др.). Выполняемое преобразование в статике отображается характеристикой управления преобразователя.
Если исходная физическая величина х подвергается последовательным преобразованиям несколькими измерительными преобразователями, то характеристику управления можно представить в виде сложной функции. Например, давление преобразуется в перемещение у с помощью мембраны, а перемещение у центра мембраны с помощью резистора преобразуется в электрическое сопротивление R. В этом случае характеристика управления может быть представлена двумя функциями у = f (x), R = φ (y) или одной сложной функцией R = φ [ f (x)] = ψ (x).

1. Измерительные преобразователи имеют разные определения в разных научных дисциплинах. В общем смысле измерительный преобразователь является устройством, которое преобразует изменение одной величины в изменение другой (см. Бриндли К. Измерительные преобразователи: Справочное пособие: Пер. с англ. – М.: Энергоатомиздат, 1991).
Мы будем использовать терминологию и понятия по изданию: Семенов С. П., Горелейченко А. В., Богачев Э. Ю. Судовые электроизмерительные приборы и информационные системы. Учебник. – М.: Транспорт, 1982. По определению и змерительный преобразователь – средство измерения, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем.
Первое преобразование входного воздействия выполняет первичный измерительный преобразователь. Его называют также чувствительным элементом. В приведенном выше примере мембрана – чувствительный элемент. Мембрана преобразует давление, действующее на нее, в перемещение центра мембраны. Обычно следующим преобразователем перемещение преобразуется в электрический сигнал.
Датчик 1 представляет собой совокупность конструктивно и функционально объединенных измерительных преобразователей, формирующих на выходе удобный для использования сигнал. Датчик, сигналоносителем на выходе которого является электрическое напряжение или ток, относится к электрическим датчикам. Именно такие электрические датчики рассматриваются в этом разделе.
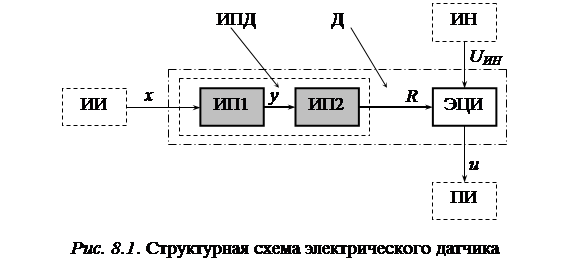
Представим электрический датчик структурной схемой (рис. 8.1).
 | |||
 |
1. Термин датчик часто употребляется как синоним более общего термина преобразователь (см. например, Бриндли К. Измерительные преобразователи: Справочное пособие: Пер. с англ. – М.: Энергоатомиздат, 1991).
Датчик – устройство, преобразующее физическую величину в сигналы для обработки техническими средствами (Першиков В. И., Савинков В. М. Толковый словарь по информатике. – М.: Финансы и статистика, 1991).
Датчик – измерительный (входной) преобразователь, преобразующий информацию об измеряемой физической величине в сигнал, удобный для использования и обработки в системах автоматического контроля и управления (Терминологический словарь по автоматике, информатике и вычислительной технике: Справ. Пособие для СПТУ/В. В. Зотов, Ю. Н. Маслов, А. Е. Пядочкин и др. – М.: Высш. шк., 1989)
На схеме рис. 8.1 выделены: первичный измерительный преобразователь (ИП1) и преобразователь (ИП2), выходная переменная которого электрическая величина (сопротивление R или, быть может, индуктивность, или емкость), вносимая в электрическую цепь измерения (ЭЦИ). ИП1 и ЭП2 в совокупности являются измерительным преобразователем (ИПД) электрического датчика (Д). ИПД и Д выделены соответственно пунктирной и штрих-пунктирной линиями. Датчик Д является составной частью канала связи источника информации (ИИ) с приемником информации (ПИ). Выходной сигнал датчика – электрическое напряжение u (или ток) создается путем модуляции 1 выходным сигналом ИПД (например, функцией времени R (t)) напряжения UИН питания ЭЦИ от стабильного источника электрической энергии (обычно источника напряжения ИН). ИПД в схеме на рис. 8.1 выполняет функцию модулятора процесса передачи энергии от ИН к ПИ.
По роду выходного электрического сигнала измерительные преобразователи ИПД разделяют на параметрические и генераторные. Согласно такой классификации к первой группе относятся преобразователи, формирующие выходную физическую величину в виде активного сопротивления, индуктивности или емкости. В составе этой группы реостатные преобразователи, терморезистивные, тензорезистивные, индуктивные, емкостные и др. преобразователи. К генераторным преобразователям второй группы относятся такие преобразователи, выходным сигналом которых является электродвижущая сила. Примером служат индукционные преобразователи и тахогенераторы. Для генераторного ИПД источник энергии ИН может отсутствовать.

1. Модуляция – изменение параметров некоторого физического процесса (переносчика информации) в соответствии с текущими значениями передаваемого сигнала (модулирующего сигнала). Устойство, осуществляющее модуляцию, называют модулятором. (Терминологический словарь по автоматике, информатике и вычислительной технике: Справ. Пособие для СПТУ/В. В. Зотов, Ю. Н. Маслов, А. Е. Пядочкин и др. – М.: Высш. шк., 1989)
В состав электрического датчика могут входить функциональные устройства, обеспечивающие гальваническую развязку электрических цепей, усиление электрических сигналов, кодирование информации и др.
В зависимости от входного сигнала электрические датчики разделяют на:
· датчики положения (линейного или углового), у которых электрический сигнал на выходе соответствует координате положения некоторого объекта, например, углу поворота вала;
· датчики скорости (линейной или угловой), например, скорости вращения ротора электродвигателя;
· датчики тока;
· датчики напряжения и др.
В некоторых случаях датчик может рассматриваться как составная часть электроаппарата. В частности, некоторые аппараты ручного управления имеют в своем составе датчик положения, входной сигнал которого формируется органом ручного управления. Например, с помощью потенциометрического датчика (см. п. 8.3) преобразуют угол поворота рукоятки управления в пропорциональное этому углу электрическое напряжение.
На рис. 8.2 приведены временные диаграммы, отображающие преобразование входного сигнала x в выходной сигнал u датчиками разных типов.
С помощью электрического датчика с аналоговым выходом (рис. 8.1а) входная физическая величина x в каждый текущий момент времени t преобразуется в выходную электрическую величину u (например, напряжение). К характеристике управления обычно предъявляется требование, чтобы она представляла собой линейную функцию – линейную зависимость выходной величины от входной величины u = kx, где k - постоянная величина (коэффициент преобразования).
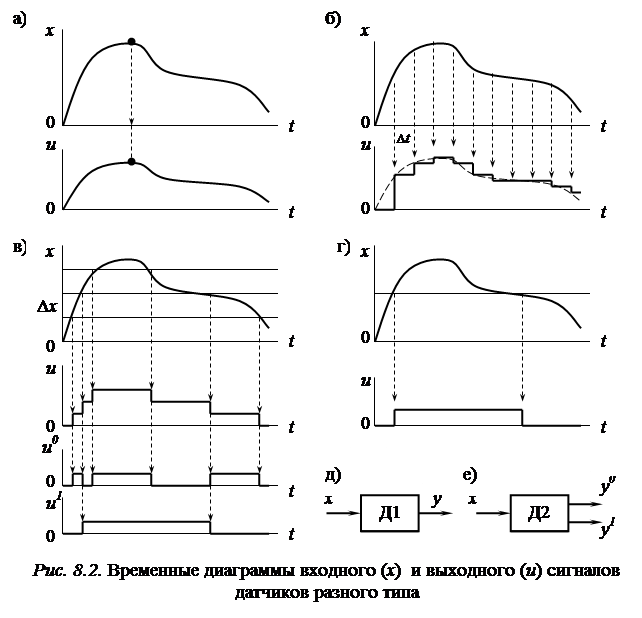
Электрические датчики с дискретным выходом осуществляют квантование входного сигнала x по времени (рис. 8.1б) или/и квантование по уровню (рис. 8.1в). Как правило, шаги квантования Δ t по времени и Δ x по уровню фиксированы, т.е. имеют определенное неизменное для датчика значение. Выходной сигнал u представляет собой кусочно-постоянную функцию времени. Значения этой функции могут быть выражены двоичным кодом, а выходной сигнал может быть передан датчиком по нескольким выходам, на каждом из которых действует сигнал с двумя возможными значениями. Одному значению приписывают логический 0, другому – логическую 1. Например, для некоторых нормированных двоичных сигналов значению напряжения в пределах от 0 до 2В приписывают логический 0, а значению напряжения в пределах от 6 до 10 В приписывают логическую 1. В приведенном на рис. 8.1в примере по выходу u0 передается двоичный сигнал - нулевой разряд кода целого числа К. Это число равно количеству шагов квантования по уровню, когда Δ x.К ≤ x < Δ x. (К +1). По выходу u1 передается двоичный сигнал - первый разряд кода и т.д.. Датчик, осуществляющий преобразование аналог-код, представляют как датчик с цифровым выходом.
Элемент на рис. 8.1д отображает датчик с аналоговым выходом, а также с выходом, полученным в результате квантования входного сигнала. Элемент на рис. 8.1е – датчик с цифровым выходом. Количество физических выходов (линий электрической связи) у цифрового датчика обычно больше двух. Оно определяется количеством разрядов выбранного кода.
Частным случаем (рис. 8.1г) является цифровой выход (рис. 8.1д), содержащий одноразрядный код значений x типа «больше» или «меньше» заданной величины. Датчик с таким выходом называют позиционным датчиком. К позиционным датчикам можно отнести разнообразные электромеханические и электронные реле, у которых коэффициент возврата равен единице.

