2015-04-17
2015-04-17 1871
1871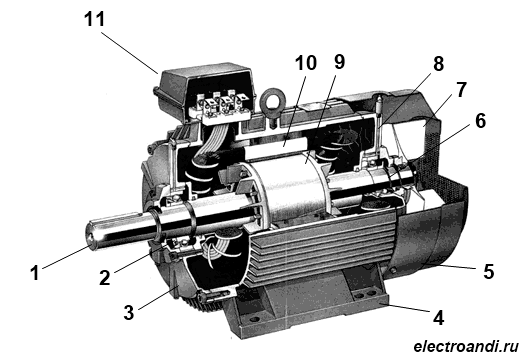
На рисунке: 1 - вал, 2,6 - подшипники, 3,8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
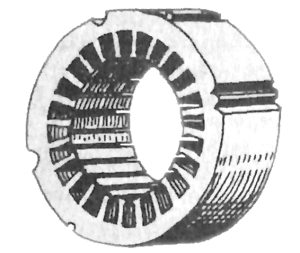
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
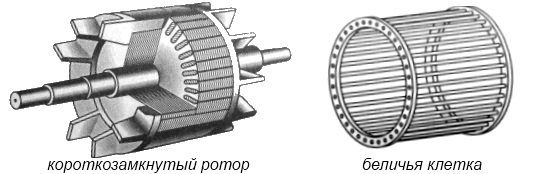
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье -асинхронный двигатель с фазным ротором.
Расчет магнитной цепи выполняется с целью определения н. с.  (или намагничивающего тока
(или намагничивающего тока  ) первичной обмотки (обмотки статора), под действием которой возникает магнитный поток, индуктирующий в этой обмотке э. д. с.
) первичной обмотки (обмотки статора), под действием которой возникает магнитный поток, индуктирующий в этой обмотке э. д. с.  ; примерно равную номинальному напряжению
; примерно равную номинальному напряжению  (
( где для двигателя
где для двигателя  - см. раздел).
- см. раздел).
В силу симметрии магнитной цепи в поперечном сечении (рис. 16-33) и равенства магнитных потоков каждой пары полюсов расчет выполняется обычно на один полюс.
Магнитная цепь рассчитывается по магнитному потоку при холостом ходе и номинальном напряжении (магнитный поток при номинальной нагрузке на 1-2% меньше, чем при холостом ходе):
где - номинальное фазное напряжение;
 - коэффициент, определяемый по рис. 16-34 в соответствии с предварительно намеченным коэффициентом насыщения зубцового слоя
- коэффициент, определяемый по рис. 16-34 в соответствии с предварительно намеченным коэффициентом насыщения зубцового слоя  (обычно
(обычно  );
);  - обмоточный коэффициент для основной гармонической (см. раздел п. 3 в).
- обмоточный коэффициент для основной гармонической (см. раздел п. 3 в).
Магнитная цепь рассчитывается на основе закона полного тока для средней магнитной линии (см. рис. 16-33)
где Н - напряженность магнитного поля; dl - элементарный участок магнитной линии;  - амплитуда основной гармонической н. с, обусловленная намагничивающим током
- амплитуда основной гармонической н. с, обусловленная намагничивающим током  (см. раздел п. 1);
(см. раздел п. 1);  - результирующая н. с. на один полюс.
- результирующая н. с. на один полюс.
Для облегчения практических расчетов линейный интеграл заменяют суммой магнитных напряжений пяти участков, на которые разбивают магнитную цепь, исходя из предположения, что в пределах каждого участка напряженность магнитного поля постоянна:

где  - воздушный зазор (см. рис. 16-33);
- воздушный зазор (см. рис. 16-33);  - зубцовая зона статора;
- зубцовая зона статора;  - ярмо статора;
- ярмо статора;  - зубцовая зона ротора;
- зубцовая зона ротора;  - ярмо ротора.
- ярмо ротора.
Максимальная индукция в воздушном зазоре

где  определяется по рис. 16-34 в соответствии с коэффициентом
определяется по рис. 16-34 в соответствии с коэффициентом  , предварительно намеченным при расчете потока Ф (см. выше).
, предварительно намеченным при расчете потока Ф (см. выше).
Уравнения напряжений асинхронного двигателя
Обмотка ротора асинхронного двигателя не имеет электрической связи с обмоткой статора. Между ними существует только магнитная связь и энергия из обмотки статора передается в обмотку ротора магнитным полем. В этом отношении асинхронная машина аналогична двухобмоточному трансформатору: обмотка статора является первичной, а обмотка ротора - вторичной.
Так же как и в трансформаторе, в асинхронной машине имеется результирующий магнитный поток Ф, сцепленный как с обмоткой статора, так и с обмоткой ротора, и два потока рассеяния:  - поток рассеяния обмотки статора и
- поток рассеяния обмотки статора и  - поток рассеяния обмотки ротора.
- поток рассеяния обмотки ротора.
Амплитуда результирующего магнитного потока  , вращающегося с частотой n1, наводит в фазах неподвижной обмотки статора ЭДС, действующее значение которой равно
, вращающегося с частотой n1, наводит в фазах неподвижной обмотки статора ЭДС, действующее значение которой равно
 .
.
Магнитный поток рассеяния наводит в фазах обмотки статора ЭДС рассеяния, значение которой определяется падением напряжения на индуктивном сопротивлении рассеяния фазы обмотки статора
 ,
,
где  - индуктивное сопротивление рассеяния фазы обмотки статора.
- индуктивное сопротивление рассеяния фазы обмотки статора.
Уравнение напряжения фазы обмотки статора, включенной в сеть с напряжением  , запишется:
, запишется:
 ,
,
где  - падение напряжения на активном сопротивлении фазы обмотки статора
- падение напряжения на активном сопротивлении фазы обмотки статора  .
.
Окончательная запись уравнения не отличается от уравнения напряжения для первичной обмотки трансформатора
.
Результирующий магнитный поток Ф, обгоняя вращающийся ротор, индуктирует в фазе обмотки ротора ЭДС

где  - частота ЭДС
- частота ЭДС  в фазе обмотки вращающегося ротора;
в фазе обмотки вращающегося ротора;  - ЭДС, наведенная в фазе обмотки неподвижного ротора.
- ЭДС, наведенная в фазе обмотки неподвижного ротора.
Магнитный поток рассеяния наводит в фазах обмотки ротора ЭДС рассеяния, значение которой определяется падением напряжения на индуктивном сопротивлении фазы этой обмотки:
 ,
,
где  - индуктивное сопротивление рассеяния фазы обмотки ротора при неподвижном роторе.
- индуктивное сопротивление рассеяния фазы обмотки ротора при неподвижном роторе.
Уравнение напряжения для фазы обмотки ротора
 ,
,
где  - активное сопротивление фазы обмотки ротора.
- активное сопротивление фазы обмотки ротора.
Окончательная запись уравнения:
 .
.
2.7. Уравнения МДС и токов асинхронного двигателя
Результирующий магнитный поток в асинхронном двигателе создается совместным действием МДС обмоток статора  и ротора
и ротора 
 ,
,
где  - магнитное сопротивление магнитной цепи двигателя;
- магнитное сопротивление магнитной цепи двигателя;  - результирующая МДС, равная МДС обмотки статора в режиме холостого хода:
- результирующая МДС, равная МДС обмотки статора в режиме холостого хода:
 ,
,
где I0- ток холостого хода в фазе обмотки статора.
МДС обмоток статора и ротора на один полюс при работе двигателя под нагрузкой равны
 ;
;
 ,
,
где  - число фаз обмотки ротора;
- число фаз обмотки ротора;  - обмоточный коэффициент обмотки ротора.
- обмоточный коэффициент обмотки ротора.
При изменении нагрузки на валу двигателя меняются токи в статоре I1 и роторе I2. Результирующий магнитный поток при этом сохраняется неизменным, так как напряжение, подведенное к обмотке статора, неизменно ( ) и почти полностью уравновешивается ЭДС E1 обмотки статора:
) и почти полностью уравновешивается ЭДС E1 обмотки статора:
 .
.
Так как ЭДС E1 пропорциональна результирующему магнитному потоку, то он при изменении нагрузки остается неизменным. Этим и объясняется то, что, несмотря на изменения МДС F1 и F2, результирующая МДС остается неизменной
 ,
,  .
.
Разделив это равенство на  , определим уравнение токов асинхронного двигателя
, определим уравнение токов асинхронного двигателя
 ,
,
где  - ток ротора, приведенный к обмотке статора.
- ток ротора, приведенный к обмотке статора.
Окончательное уравнение токов асинхронного двигателя
 .
.
Из этого уравнения следует, что ток статора в асинхронном двигателе имеет две составляющие:  - намагничивающую (почти постоянную) составляющую (
- намагничивающую (почти постоянную) составляющую ( ) и
) и  - переменную составляющую, компенсирующую МДС обмотки ротора.
- переменную составляющую, компенсирующую МДС обмотки ротора.
Таким образом, ток обмотки ротора оказывает на магнитную систему двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора при активно-индуктивной нагрузке.
11. Потери и КПД АД. Электромагнитный момент и механические характеристики АД. Характеристики АД при изменении напряжения сети и активного сопротивления обмотки ротора.
Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические.
Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки,
рэ1 = m1I12r1.
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью
Рэм = Р1 - (рc1 + рэ1).
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора
рэ2 = m2I22r2 = m1I’22r’2.
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
Р’2 = Рэм - рэ2.
Таким образом, полная механическая мощность
Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s].
Выполнив несложные преобразования, получим
рэ2[(1-s)/s] = Рэм - рэ2 и
рэ2= sРэм,
т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях.
Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают.
Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рдпотерь
Р2 = Р’2 - (рмех + рд).
Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
Р2 = Р1 - ∑р,
где ∑р – сумма потерь в асинхронном двигателе,
∑р = рс1 + рэ1 + рэ2+ рмех + рд.
Коэффициент полезного действия асинхронного двигателя
η = Р2/ Р1 = 1 - ∑р/ Р1.
Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).