 2015-04-17
2015-04-17 1098
1098При проектировании АСР с использованием аналитических методов каждый из её элементов должен быть представлен в виде соответствующей математической модели. Поскольку интерес представляют процессы управления, протекающие во времени, такие модели имеют вид дифференциальных уравнений, т.е. временных зависимостей выходных сигналов элементов от их входных сигналов. Такие зависимости могут быть получены как на основании эксперимента, так и путём использования основных физических законов. Заметим, что и сами законы физики были получены в своё время на основании большого числа опытов и размышлений над ними. Таким образом, когда имеется возможность воспользоваться готовыми результатами (известными физическими законами), это необходимо делать, поскольку тем самым сокращается время на исследование и экономятся средства на эксперименты. Это как раз тот случай, когда, как говорят, «не следует изобретать велосипед».
Рассмотрим аналитический метод получения модели на примере двигателя постоянного тока, когда управление осуществляется током якоря (рис.8.1). Примем, что гистерезис и скачки напряжения на щётках не оказывают существенного влияния на работу двигателя. При этом двигатель работает в режиме, близком к номинальному, т.е. вращает нагрузку с определенной постоянной скоростью.
Для того чтобы выделить основные входные и выходные сигналы, необходимо знать назначение двигателя в системе. Так, например, оттого, будет ли двигатель использоваться для вращения шпинделя станка с определённой скоростью или для поворота какой-либо платформы на требуемый угол, в качестве выходной величины следует принимать соответственно скорость вращения или угол поворота вала двигателя.
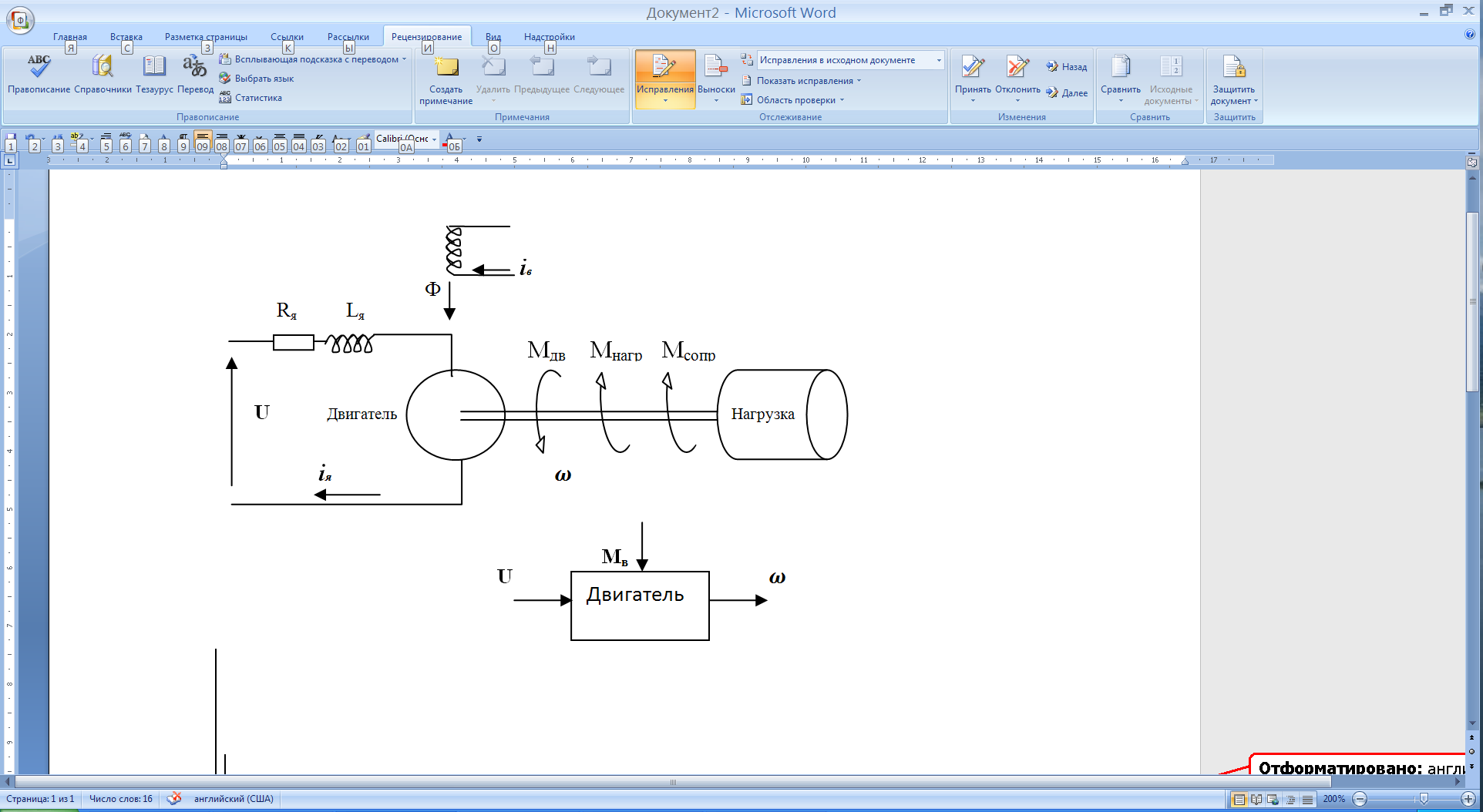
Рис.8.1. Двигатель постоянного тока
Рассмотрим двигатель, используемый для вращения шпинделя станка при обработке закреплённой в нём заготовки. По требованиям технологии обработки необходимо обеспечить определённую скорость вращения заготовки  . В качестве управляющего входного сигнала в соответствии с рис.8.1 примем напряжение цепи якоря U, а в качестве возмущающего – момент сопротивления резанию
. В качестве управляющего входного сигнала в соответствии с рис.8.1 примем напряжение цепи якоря U, а в качестве возмущающего – момент сопротивления резанию  , поскольку он меняется по не зависящим от объекта регулирования причинам. Это изменение происходит или из-за износа резца, или из-за неравномерного снятия слоя металла с заготовки. Если принять колебания напряжения в сети как незначительные, возмущение по питанию можно не рассматривать.
, поскольку он меняется по не зависящим от объекта регулирования причинам. Это изменение происходит или из-за износа резца, или из-за неравномерного снятия слоя металла с заготовки. Если принять колебания напряжения в сети как незначительные, возмущение по питанию можно не рассматривать.
Таким образом, уравнение, которое следует получить, должно представлять собой математическую зависимость 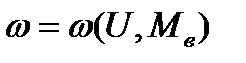 .
.
Следует заметить, что, имея дело с необходимостью математического описания элементов систем, имеющих разную физическую природу, нет необходимости «изобретать велосипед». По каждому объекту следует обращаться к соответствующей литературе, знакомясь с математическими описаниями реализуемых данных объектом физических процессов.
Такие описания получают на основе законов сохранения материи, энергии и частных наук, таких, например как электротехника, гидравлика и т.п.
В случаях, когда таких описаний не существует из-за сложности процессов, проводится так называемый «активный эксперимент», основанный на методе «черного ящика». При этом входной сигнал меняется ступенчато. Выходной сигнал элемента регистрируется и далее, на основании этих двух сигналов находится математическое описание зависимости выходного сигнала от входного.
Почему применяется эпитет «черный». Вспомним собаку академика
И. П. Павлова. Входной сигнал – лампочка зажигается, выходной сигнал – слюна собаки. Что происходит в ее теле, мозгах - не описано математически («дело темное, черное»). Но реакция конкретна, что позволяет делать конкретные выводы о физиологии пищеварения, не проводя бесполезного препарирования мозга.
В данном случае имеем одну из не часто встречающихся возможностей воспользоваться сведениями из электротехники.
Магнитный поток двигателя Ф пропорционален току обмотки
возбуждения iв
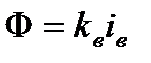 , (8.1)
, (8.1)
где kв – коэффициент пропорциональности.
Момент, развиваемый двигателем, равен
 , (8.2)
, (8.2)
где iя – ток в цепи якоря, к1 – коэффициент пропорциональности.
Поскольку при управлении током якоря iя = const, запишем
 . (8.3)
. (8.3)
Ток якоря связан с напряжением U зависимостью
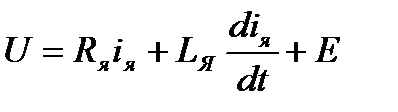 , (8.4)
, (8.4)
где  – соответственно сопротивление и индуктивность якорной цепи; E – противоЭДС, пропорциональная скорости двигателя:
– соответственно сопротивление и индуктивность якорной цепи; E – противоЭДС, пропорциональная скорости двигателя:
 . (8.5)
. (8.5)
Из условия равновесия моментов на валу запишем
 . (8.6)
. (8.6)
Здесь момент нагрузки вращающегося инерционного тела находится как
 , (8.7)
, (8.7)
где J – приведённый момент инерции двигателя; f – коэффициент, зависящий от толщины снимаемого слоя металла и скорости продольной подачи;  – момент сопротивления резанию. Его изменение – возмущение для системы, вызванное неравномерностью диаметра обрабатываемой заготовки или износом резца.
– момент сопротивления резанию. Его изменение – возмущение для системы, вызванное неравномерностью диаметра обрабатываемой заготовки или износом резца.
Запишем систему уравнений, описывающих работу двигателя:
 , (8.8)
, (8.8)
 , (8.9)
, (8.9)
 . (8.10)
. (8.10)
Для получения зависимости скорости вращения от питающего напряжения и возмущающего момента сопротивления резанию  необходимо исключить промежуточные переменные
необходимо исключить промежуточные переменные  . Тогда будем иметь
. Тогда будем иметь
 . (8.11)
. (8.11)
Полученное уравнение представляет собой линейное дифференциальное уравнение второго порядка. Линейным оно получилось именно из-за того, что в качестве режима работы был рассмотрен режим вращения ротора с постоянной скоростью при её изменении в достаточно узких пределах. В этом случае, например, закон Ома, использованный в уравнении (8.10), имел бы вид:  . В общем, это не верно, так как
. В общем, это не верно, так как  меняется и особенно сильно при больших токах, что не позволяет говорить о линейности закона Ома в широком диапазоне изменения тока. Таким образом, если бы математическая модель двигателя получилась для всех возможных режимов его работы, то такая модель представляла бы собой нелинейное дифференциальное уравнение.
меняется и особенно сильно при больших токах, что не позволяет говорить о линейности закона Ома в широком диапазоне изменения тока. Таким образом, если бы математическая модель двигателя получилась для всех возможных режимов его работы, то такая модель представляла бы собой нелинейное дифференциальное уравнение.
Рассмотрим другой пример: бак, используемый для поддержания в нём уровня воды (рис.8.2). Это необходимо для создания и поддержания у потребителей постоянного напора воды.
Gвх
h Gвых
Gвых, м3 /ч
| Бак |
Рис.8.2. Бак для системы поддержания уровня воды
Поскольку интерес представляет уровень h воды в баке, то он и будет выходной величиной. Причины, приводящие к изменению h, – это изменения расхода воды на входе  и изменение расхода воды на выходе из бака
и изменение расхода воды на выходе из бака  (следует заметить, что на блок схеме - входной сигнал, не смотря на то, что это расход воды на выходе из бака). Так как
(следует заметить, что на блок схеме - входной сигнал, не смотря на то, что это расход воды на выходе из бака). Так как  – входной сигнал, изменяющийся по желанию потребителя, то он является возмущающим воздействием. Входной сигнал
– входной сигнал, изменяющийся по желанию потребителя, то он является возмущающим воздействием. Входной сигнал  может изменяться оператором или в АСР с помощью исполнительного механизма, и, таким образом,
может изменяться оператором или в АСР с помощью исполнительного механизма, и, таким образом,  представляет собой управляющее воздействие.
представляет собой управляющее воздействие.
Для получения уравнения, связывающего h с  и
и  , воспользуемся уравнением материального баланса.
, воспользуемся уравнением материального баланса.
 , (8.12)
, (8.12)
где  – количество воды в баке.
– количество воды в баке.
Так как  , где s – площадь поперечного сечения бака (s = const),
, где s – площадь поперечного сечения бака (s = const),  – удельный вес воды, а по законам гидравлики
– удельный вес воды, а по законам гидравлики
 , (8.13)
, (8.13)
где k – коэффициент, учитывающий сужение, форму выходного отверстия и т.п., то с учётом уравнений (8.12) и (8.13) запишем
 .
.
Перенесем выходную величину h в левую часть уравнения, а входную – управляющий сигнал - расход воды на входе, в правую часть уравнения получим
 (8.14)
(8.14)
Уравнение - нелинейное дифференциальное уравнение первого порядка, решить которое аналитически невозможно.
Вопросы для самоконтроля
1. Зачем нужны математические модели элементов систем?
2. На основе чего могут быть получены математические модели элементов систем?
3. Как определяется какой из сигналов следует считать входным сигналом, а какой выходным сигналом элемента системы?

