 2015-04-30
2015-04-30 4007
4007Система помощи движению по полосе (другие наименования – помощник движения по полосе, система удержания полосы движения) помогает водителю придерживаться выбранной полосы движения и тем самым, предотвращать аварийные ситуации. Система эффективна при движении по автомагистралям и обустроенным федеральным дорогам, т.е. там, где имеется качественная дорожная разметка.
Различают два вида систем помощи движения по полосе: пассивные и активные. Пассивная система предупреждает водителя об отклонении от выбранной полосы движения. Активная система наряду с предупреждением производит корректировку траектории движения.
У разных автопроизводителей система удержания полосы движения имеет свои торговые названия, но предлагаемые системы имеют, в основном, схожую конструкцию:
-Lane Assist от Audi, Volkswagen, SEAT;
-Lane Departure Warning System от BMW, Citroen, Kia, Ceneral Motors, Opel, Volvo;
-Lane Departure Prevention от Infiniti;
-Lane Keep Assist System от Honda, Fiat;
-Lane Keeping Aid от Ford;
-Lane Keeping Assist от Mercedes-Benz;
-Lane Keeping Support System от Nissan;
-Lane Monitoring System от Toyota.
Система помощи движению по полосе является электронной системой и включает клавишу управления, видеокамеру, блок управления и исполнительные механизмы. С помощью клавиши управления производится включение системы. Клавиша может располагаться на рычаге переключения указателей поворота, панели приборов или центральной консоли.
Видеокамера производит запись изображения на определенном расстоянии от автомобиля и его оцифровку. В системе используется монохромная камера, которая распознает линии разметки как резкое изменение градации серого. Камера объединена с блоком управления. Объединенный блок располагается на лобовом стекле за зеркалом заднего вида.
Исполнительными устройствами системы помощи движения по полосе являются контрольная лампа, звуковой сигнал, вибромотор на рулевом колесе, нагревательный элемент лобового стекла, электродвигатель электромеханического усилителя руля.
Информация о работе системы выводится на панель приборов в виде контрольной лампы. Предупреждение водителя производится с помощью вибрации рулевого колеса, а также подачи визуальных звуковых и световых сигналов. Вибрацию создает вибромотор, встроенный в рулевое колесо.
Нагревательный элемент располагается на ветровом стекле, при необходимости автоматически включается, устраняет запотевание и обледенение окна камеры.
Корректировка траектории движения осуществляется принудительным подруливанием системы рулевого управления с помощью электромеханического усилителя руля (большинство систем) или подтормаживанием колес с одной стороны автомобиля (система Lane Departure Prevention).
Во время работы активной системы помощи движения по полосе реализуются следующие основные функции:
1) распознавание траектории полосы движения;
2) визуальное информирование о работе системы;
3) корректировка траектории движения;
4) предупреждение водителя.
Обстановка перед автомобилем проецируется на светочувствительную матрицу камеры и преобразуется в черно-белое изображение, которое анализируется электронным блоком управления.
Алгоритм работы блока управления определяет положение линий разметки полосы, оценивает качество распознавания разметки, вычисляет ширину полосы и ее кривизну, рассчитывает положение автомобиля на полосе. На основании проведенных вычислений осуществляются управляющее воздействие на рулевое управление (тормозную систему), и если требуемый эффект удержания автомобиля на полосе не достигается - предупреждается водитель (вибрация рулевого колеса, звуковой и световой сигналы).
Необходимо отметить, что величина крутящего момента, прикладываемого к рулевому механизму (тормозного усилия на двух колесах с одной стороны автомобиля) невелика и в любой момент может быть преодолена водителем.
При преднамеренном перестроении с одной полосы на другую должен быть включен сигнал поворота, иначе система будет препятствовать маневру. При неблагоприятных условиях (отсутствие одной линии или всей разметки, загрязненное или заснеженное дорожное полотно, узкая полоса движения, нестандартная разметка на ремонтируемых участках, поворот малого радиуса) система деактивируется.
Предусмотрено три режима работы системы помощи движения по полосе:
1.система включена и активирована (активный режим);
2.система включена и деактивирована (пассивный режим);
3.система выключена.
BMW не считает вмешательство в управление автомобилем обязательным. На грани чрезвычайной ситуации руль мюнхенского флагмана слегка вибрирует. К счастью, этот электронный помощник в BMW работает впечатляюще надежно. Когда "семерка" распознает разметку, на руле раздается легкая вибрация – можно быть уверенным, что машина следит за дорогой.

Рисунок 3.22 – Система слежения за разметкой BMW
Предупреждение о пересечении подается заранее, таким образом, у водителя остается достаточно времени, чтобы среагировать. Даже на крутых развязках система не теряет бдительности и контролирует разметку. В наших руках BMW 740d допустил минимум ошибок, распознавал даже сильно изношенные линии и не обозначенную границу между асфальтом и газоном на обочине. Оплошности были допущены на дороге, проходящей через лес – там машину сбивали с толку пестрые тени. Временная разметка также не поддалась электронике BMW. В BMW слежение активно на скоростях более 70 км/ч, поэтому в зонах ремонтных работ она дремлет.
Водители с-класса вынуждены рулить самостоятельно. Хотя здесь так же, как в Audi и VW, установлен электрический усилитель руля, он не обучен вмешиваться в управление. Но Mersedes все же пытается корректировать курс и делает это по-своему.
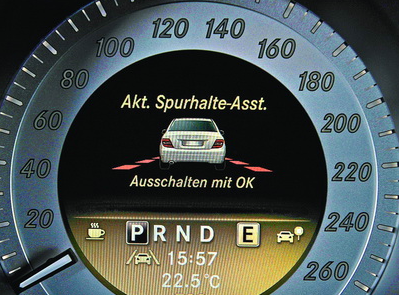
Рисунок 3.23 – Система слежения за разметкой Mersedes
На скоростях более 60 км/ч машина распознает разметку и при ее несанкционированном пересечении создает короткий тормозной импульс, чтобы изменить курс движения. На пологих траекториях такое вмешательство достаточно эффективно. Но если автомобиль будет приближаться к разметке под большим углом, прикусывание тормозов ничем не поможет. Зато C-класс оповестит водителя вибрацией на руле. Вообще, система Mercedes реагирует на сплошные линии разметки, а прерывистые игнорирует. Также она не жалует желтую разметку и не обращает внимание на обочины.
Камера установлена перед зеркалом заднего вида. Она охотно распознает жирные линии разметки и подает сигнал на задействование тормозов.
№ 2157326 Рулевое управление транспортного средства
ФОРМУЛА ИЗОБРЕТЕНИЯ
Рулевое управление транспортного средства с переменным передаточным отношением, состоящее из рулевого колеса, редуктора, карданной передачи с возможностью изменения углов между телескопическими карданными валами, мультипликатора, рулевого механизма и привода, отличающееся тем, что корпус телескопического карданного вала связан с неподвижным элементом крепления рулевого колеса посредством зубчатой пластины и зубчатого сектора, имеющего фиксатор положения.
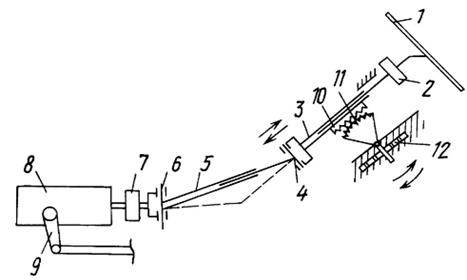
Рисунок 3.24 - Схема рулевого управления
Изобретение относится к транспортному машиностроению, в частности к рулевому управлению транспортных средств.
Известно рулевое управление, состоящее из рулевого колеса, редуктора, карданной передачи с возможностью изменения углов между телескопическими карданными валами, мультипликатора, рулевого механизма и привода.
Недостатком известного рулевого управления является сложность регулирования углов между телескопическими карданными валами для изменения передаточного отношения.
Изобретение направлено на упрощение процесса регулирования характера изменения передаточного отношения рулевого управления.
Решение поставленной задачи достигается тем, что корпус телескопического карданного вала связан с неподвижным элементом крепления рулевого колеса посредством зубчатой пластины и зубчатого сектора, имеющего фиксатор положения.
Рулевое управление состоит из рулевого колеса 1, редуктора 2, карданной передачи 3, 4, 5, 6, мультипликатора 7, рулевого механизма 8 и привода 9. Корпус телескопического карданного вала 3 связан с неподвижным элементом крепления рулевого колеса 1 посредством зубчатой пластины 10 и зубчатого сектора 11, имеющего фиксатор положения 12.
Заявляемое рулевое управление работает следующим образом. При необходимости изменения передаточного отношения рулевого управления, которое зависит от угла наклона между телескопическими карданными валами, следует освободить сектор 11 от фиксатора 12 и переместить в нужное положение.
В результате применения предлагаемого рулевого управления упрощается процесс регулирования характера изменения передаточного числа рулевого управления.
№ 2139200 Рулевое управление амфибии
ФОРМУЛА ИЗОБРЕТЕНИЯ
Рулевое управление транспортного средства, состоящее из рулевой колонки, рулевого механизма, сошки, продольной тяги, двуплечего рычага, поперечной тяги, коромысла и поворотного рычага, отличающееся тем, что ось перемещения поперечной тяги совпадает с осью вращения рычага подвески, выполненной полой в месте крепления к борту.
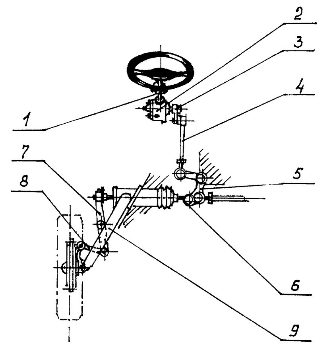
Рисунок 3.25 - Схема рулевого управления амфибии
Изобретение относится к транспортному машиностроению, в частности к рулевым управлениям автомобилей для перемещения по суше и воде.
Известно рулевое управление транспортного средства, содержащее рулевую колонку, рулевой механизм, рулевой привод. Рулевой привод состоит из сошки, продольной тяги, двуплечего рычага, поперечной тяги, коромысла и поворотного рычага (Круглов С.М. Устройство, техническое обслуживание и ремонт легковых автомобилей: практическое пособие, 3-е изд., переработ. и дополн. -М.: Высшая школа, 1991,-351 с.: ил. Рис. 82, с. 138 и рис. 83 с. 142).
Недостатком известного рулевого управления является невозможность поднимать управляемые колеса для движения по воде и возвращать их в исходное положение без изменения углов их установки.
Изобретение направлено на устранение трудозатрат на регулировку углов установки управляемых колес после изменения их положения при перемещении по воде.
Решение поставленной задачи достигается тем, что поперечная рулевая тяга установлена внутри полой оси верхнего рычага подвески. Причем ось перемещения поперечной тяги и ось качания рычага подвески совпадают.
Заявляемое рулевое управление с возможностью изменения положения управляемых колес без последующей необходимости регулировки их установки отличается от прототипа тем, что поперечная рулевая тяга проходит внутри верхнего рычага подвески, который для этого выполнен полым. Поскольку ось поперечного перемещения рулевой тяги совпадает с осью качания рычага подвески, то нарушения регулировки установки управляемых колес при изменении их положения в вертикальной плоскости не происходит.
Изобретение поясняется чертежом, на котором показана схема рулевого управления транспортного средства для перемещения по суше и воде.
Рулевое управление транспортного средства состоит из рулевой колонки 1, рулевого механизма 2, сошки 3, продольной тяги 4, двуплечего рычага 5, поперечной тяги 6, проходящей внутри оси рычага подвески 9, коромысла 7 и поворотного рычага 8. Причем коромысло 7 имеет промежуточную опору на рычаге подвески 9.
Заявляемое рулевое управление транспортного средства для перемещения по суше и воде работает следующим образом. При перемещении амфибии по суше усилие водителя от рулевой колонки 1 передается на рулевой механизм 2. Сошка 3, совершая вращательное движение, перемещает продольную тягу 4 и двуплечий рычаг 5. Далее усилие через поперечную тягу 6, установленную внутри оси рычага подвески 9, передается на коромысло 7 и поворотный рычаг 8, который обеспечивает поворот управляемых колес в продольной плоскости. При перемещении по воде управляемые колеса поднимаются в верхнее положение по траектории, соответствующей траектории движения, которую описывает рычаг подвески 9 и соединенные с ним коромысло 7 и поворотный рычаг 8. Таким образом, расположенная внутри оси рычага подвески поперечная тяга позволяет изменять положение управляемых колес для движения по суше и воде без разборки рулевого привода и последующей регулировки.
В результате применения предлагаемого рулевого управления обеспечивается возможность изменения положения управляемых колес для движения транспортного средства по суше и воде без разборки и последующей регулировки.
№ 2370398 Электроусилитель рулевого управления с волновым редуктором, активное рулевое управление с циклоидальным вариатором
ФОРМУЛА ИЗОБРЕТЕНИЯ
Активное рулевое управление, отличающееся тем, что в качестве редуктора, передающего вращение от органа управления к колесам, применен циклоидальный редуктор, промежуточное тело вращения которого установлено на валу управляющего внешнего привода, имеющего возможность вращения и фиксации, а шестерни ступеней, установленные с возможностью свободного вращения на этом валу, связаны с входным и выходным валами рулевого управления, причем управляющий внешний привод вращает вал с переменной частотой по сигналам блока управления в зависимости от скорости автомобиля, угла поворота органа управления и скорости его вращения, при этом происходит изменение передаточного отношения редуктора в широком диапазоне.
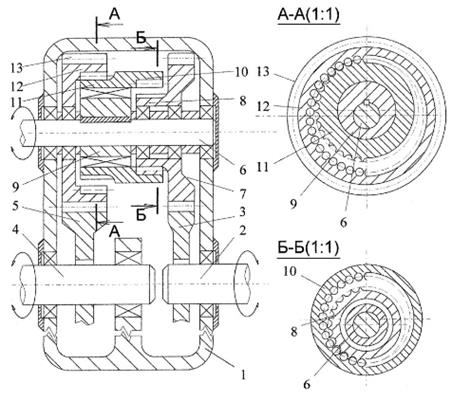
Рисунок 3.26 - На чертеже изображен в разрезе (вид сверху) циклоидальный вариатор в сборе с валом рулевого управления
Изобретение относится к области автомобилестроения.
Известен усилитель рулевого управления, содержащий в качестве редуктора, передающего вращение от электродвигателя к валу рулевой колонки, червячную передачу (журнал "За рулем", № 10, 2000 г., «В недрах ЭУРа» А.Будкин, а также https://zr.ru/articles/40870). Недостатком его является сложность изготовления трехзаходного эвольвентного червяка, постоянное передаточное отношение, недостаточная обратная связь.
Наиболее близким аналогом предлагаемого устройства является активное рулевое управление автомобилей БМВ (Active Steering), имеющее в качестве редуктора планетарный редуктор, водило которого перемещается электродвигателем через червячную передачу, регулированием оборотов которого достигается управление передаточным числом редуктора (журнал "За рулем", № 10, 2002, «На пути к джойстику» А.Фомин, а также https://zr.ru/articles/41034). Недостатком его является наличие червячной передачи, сложность технологии изготовления, необходимость применения мощного высокомоментного электродвигателя.
Целью изобретения является увеличение возможностей регулирования передаточного числа в широком диапазоне, ресурса рулевого управления и улучшение его технических характеристик.
Поставленная цель достигается тем, что в качестве редуктора, передающего вращение от органа управления к колесам, применен циклоидальный редуктор, промежуточное тело вращения которого установлено на валу управляющего внешнего привода, имеющего возможность вращения и фиксации, а шестерни ступеней, установленные с возможностью свободного вращения на этом валу, связаны с входным и выходным валами рулевого управления, причем при активизации управляющий внешний привод вращает вал с переменной частотой по сигналам блока управления в зависимости от скорости автомобиля, угла поворота органа управления и скорости его вращения, при этом происходит изменение передаточного отношения редуктора в широком диапазоне. В упрощенном варианте может быть применена волновая передача (редуктор), содержащая генератор волн на валу электродвигателя, гибкое колесо, неподвижно закрепленное в корпусе, жесткое колесо, связанное с валом рулевого управления, причем электродвигатель вращает вал по сигналам блока управления в зависимости от угла поворота органа управления и скорости его вращения, при этом происходит усиление момента вращения от органа управления к управляемым колесам.
РУЛЕВОЕ УПРАВЛЕНИЕ С ЦИКЛОИДАЛЬНЫМ ВАРИАТОРОМ содержит корпус 1, в котором с возможностью вращения установлены входной вал 2 рулевого управления с шестерней 3 и выходной вал 4 с шестерней 5, вал 6 внешнего привода, ведомую шестерню 7, связанную с шестерней 3 входного вала рулевого управления, установленную с возможностью свободного вращения на валу 6 внешнего привода и выполненную заодно с внутренней шестерней 8, имеющей в качестве образующей замкнутую гипоциклическую поверхность, промежуточное тело вращения, установленное на эксцентрике 9, жестко связанном с валом 6 внешнего привода, состоящее из колеса 10 первой ступени и сателлита 11 второй ступени, имеющего в качестве образующей замкнутую гипоциклическую поверхность, солнечное колесо 12 второй ступени с интегрированной ведущей шестерней 13, связанной с шестерней 5 выходного вала рулевого управления и установленной с возможностью свободного вращения на валу 6 внешнего привода.
ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ С ВОЛНОВЫМ РЕДУКТОРОМ содержит корпус, в котором с возможностью вращения установлены вал электродвигателя и жесткое колесо волновой передачи, связанное с валом рулевого управления, генератор волн на валу электродвигателя, гибкое колесо, неподвижно закрепленное в корпусе, жесткое колесо связано с валом рулевого управления.
Активное рулевое управление с циклоидальным вариатором (далее ЦВ) работает следующим образом. При отсутствии момента вращения на валу 6 управляющего привода и жесткой его фиксации ЦВ работает как редуктор с постоянным передаточным отношением, например, 1:18 (это отношение устанавливается применением стандартного рулевого механизма, например, реечного с учетом передаточного числа самого циклоидального редуктора). В таком случае, для поворота управляемых колес на 60° необходимо осуществить поворот органа управления на 1080° или три оборота. Таким образом, при отсутствии напряжения в бортовой сети автомобиль управляется по традиционной схеме с отсутствием усилителя, но с наличием механической связи между органом управления и колесами.
Для осуществления функции изменения передаточного числа необходимо привести во вращение вал 6 управляющего внешнего привода с установленным на нем промежуточным телом вращения, причем благодаря циклоидальному зацеплению передаточное число редуктора может достигать значительных величин (1:50 и более), что способствует расширению диапазона регулирования передаточного отношения всего механизма по сравнению с червячной передачей. Колесо 10 первой ступени, обкатываясь по поверхности внутренней шестерни 8, и сателлит 11, перемещаясь внутри солнечного колеса 12 в зависимости от того, совпадает ли направление вращения вала 6 с направлением вращения шестерни 7 или противоположно ему, ускоряет либо замедляет вращение шестерни 11 относительно шестерни 7, причем активизированный управляющий привод вращает вал с переменной частотой по сигналам блока управления в зависимости от скорости автомобиля, угла поворота органа управления и скорости его вращения, при этом происходит изменение передаточного отношения редуктора в широком диапазоне.
Возможно также обратное присоединение входного и выходного валов рулевого управления, при котором передаточное число ЦВ становится меньше единицы.
Последовательное соединение двух и более ЦВ с общим управляющим приводом позволяет изменять общее передаточное число пропорционально передаточному числу одного звена в степени, равной количеству звеньев, что уменьшает необходимый диапазон изменения числа оборотов управляющего привода.
Как вариант возможно изготовление редуктора, в котором шестерня 3 входного вала 2 связана с солнечным колесом первой ступени, шестерня 5 выходного вала 4 связана с солнечным колесом второй ступени, а промежуточное тело вращения выполнено в виде сдвоенного сателлита.
В качестве управляющего внешнего привода вала 6 может быть применен электродвигатель.
Электроусилитель рулевого управления с волновым редуктором работает следующим образом. При повороте органа управления на некоторый угол сигнал с торсионного датчика поступает в блок управления, который дает команду на вращение вала электродвигателя, который вращает вал по сигналам блока управления в зависимости от угла поворота органа управления и скорости его вращения. Генератор волн через неподвижное гибкое колесо передает вращение на жесткое колесо и далее на вал рулевого управления, при этом происходит усиление момента вращения от органа управления к управляемым колесам. Благодаря значительному дипазону возможностей волновой передачи по выбору передаточного отношения также увеличиваются возможности настройки рулевого управления, а компактные, в сравнении с червячной передачей, размеры упрощают интеграцию механизма в рулевое управление.
Достоинство предлагаемого изобретения заключается в высоком КПД и нагрузочной способности циклоидальной передачи, уменьшении износа трущихся деталей за счет многопарности зацепления, широком диапазоне передаточных отношений и регулирования, простоте изготовления. Продольное (параллельно валу рулевого управления) расположение вала управляющего привода (электродвигателя) предоставляет в некоторых случаях преимущество в компоновке рулевого управления по сравнению с поперечно расположенным червячным редуктором.

