 2015-04-30
2015-04-30 2317
2317ü Офтальмологические датчики. Позволяют получать изображения внутренних структур глаза. Используются в специальных диагностических приборах дл я офтальмологии.
ü Датчики для транскриниальных исследований. Применяются для исследования мозга через кости черепа в височной или затылочной области.
ü Датчики для диагностики заболеваний носовой полости.
ü Датчики для ветеринарии.
10. 3-D датчики. Используются в акушерстве, гинекологии, абдоминальных исследованиях для получения трехмерного изображения. Не применяется для исследований, где получение качественного изображения и небольшая скорость визуализации являются необходимым. Кроме того, данный вид датчиков имеет более высокую цену по сравнению с другими типами датчиков.
По виду преобразователя
Типы датчиков и их названия определяются использованием в них различных УЗ преобразователей и способов сканирования. Внешний вид датчиков очень разнообразен, но наиболее часто используемые виды датчиков в приборах различных фирм похожи и отличаются несущественными конструктивными особенностями.
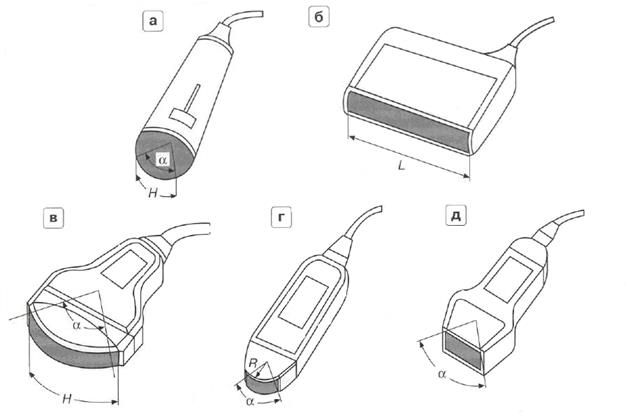
Рис 1.2.1.1. Основные типы датчиков. а – секторный механический; б- линейный электронный; в- конвексный; г – микроконвексный; д – фазированный секторный.
В зависимости от вида преобразователя можно выделить:
Ø Секторные механические датчики (sector mechanical probe) – с одноэлементными или многоэлементными кольцевыми решетками (см. рис. 1.2.1.1 а);
Ø Линейные датчики (linear probe) – с многоэлементными линейными решетками (см. рис. 1.2.1.1 б);
Ø Конвексные и микроконвексные датчики (convex или microconvex probe) – с конвексными или микроконвексными решетками соответственно (см. рис. 1.2.1.1. в);
Ø Фазированные секторные датчики (phased array probe) – с многоэлементными линейными решетками (рис. 1.2.1.1. г);
Ø Датчики с двумерной решеткой – линейные, конвексные и секторные (см. рис. 1.2.1.1. д).
Из рассмотренных типов датчиков в дипломном проекте будет рассматриваться механический секторный датчик в качестве прототипа для разрабатываемого изделия (см. рис 1.2.1.2.).
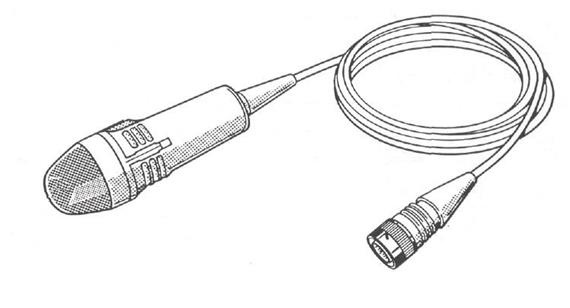
Рис. 1.2.1.2. Механический секторный датчик
В настоящее время области применения механических секторных датчиков существенно сузились, но и сейчас они распространены, т.к. обладают такими преимуществами, как:
· Возможность использовать УЗ с высокой частотой (10 МГц и более) и малыми размерами для офтальмологии, уретральных и сосудистых исследований;
· Единственный на сегодня способ реализации секторного сканирования в диапазоне углов от  до
до  ;
;
· Возможность применять кольцевые УЗ преобразователи с высокой поперечной разрешающей способностью не только в плоскости сканирования, но и в плоскости ей перпендикулярной;
· Малый размер рабочей поверхности датчика, контактирующей с поверхностью тела, что позволяет исследовать труднодоступные органы. Таким примером может быть наблюдение сердца через межреберный просвет груди.
Кроме достоинств, существуют следующие недостатки датчиков секторного механического сканирования:
· Наличие в датчике механически движущихся частей, что иногда может приводить к снижению надежности и вибрации датчика в руках оператора. Но в современных конструкциях датчиков эта особенность практически преодолена. По уровню надежности они не уступают датчикам электронного сканирования, а уровень вибрации существенно снижен;
· Мертвая зона в ближней области сектора наблюдения (5-15 мм в зависимости от типа и частоты датчика). Причиной этого является переотражение мощного сигнала излучения между поверхностью УЗ преобразователя и защитным колпачком. Частично этот недостаток можно преодолеть за счет лучшего акустического согласования материалов защитного колпачка, просветляющих слоев УЗ преобразователя и правильного подбора жидкости, заполняющего датчик;
· Увеличение расстояния между лучами (акустическими строка) на больших глубинах, что приводит к некоторому снижению поперечной разрешающей способности на этих глубинах.
· Взаимное смещение направлений излучения и приема на больших глубинах вследствие вращения УЗ преобразователя. Это приводит к некоторому снижению чувствительности и ухудшению поперечного разрешения, тем большему, чем больше угловая скорость сканирования.
При определении области медицинского применения должен быть учтен малый размер зоны обзора возле рабочей поверхности при малых угловых размерах сектора сканирования (до  ). Но это скорее особенность секторного сканирования, чем его недостаток.
). Но это скорее особенность секторного сканирования, чем его недостаток.
В секторных датчиках рабочая поверхность (защитный колпачок) закрывает объем, в котором находится перемещающийся по углу одноэлементный или кольцевой УЗ преобразователь. Объем под колпачком заполнен акустически прозрачной жидкостью для уменьшения потерь при прохождении УЗ сигналов и исключения отражения на границе разделения сред. Основной характеристикой секторных механических датчиков помимо рабочей частоты является угловой размер сектора сканирования α, который указывается в маркировке датчика. Пример маркировки: 3,5 МГц/90º. Иногда дополнительно дается длина соответствующей дуги Н рабочей поверхности.
Работа секторных механических датчиков реализована двумя способами: качанием рабочей поверхности (рис. 1.2.1.3, а) и вращением рабочей поверхности (роторный тип рис. 12.1.3, б).
В датчиках первого типа угловое перемещение ультразвукового луча происходит за счет качания вокруг некоторой оси ультразвукового преобразователя. Двигатель передает вращающий момент на механизм преобразования вращения в качание. Механизм преобразования вращения в качание и преобразователь закрыты защитным колпачком и погружены в акустически прозрачную жидкость.
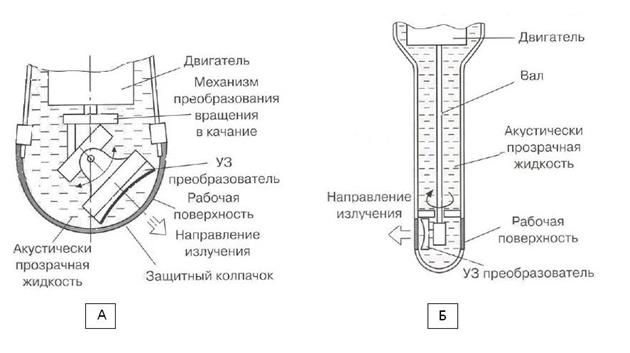
Рис. 12.1.3 Способы механического секторного сканирования:
А – с качанием ультразвукового преобразователя; Б – с вращением ультразвукового преобразователя.
Датчики с вращением рабочей поверхности конструктивно не отличаются от датчиков с качанием. Различие заключается только в том, что ультразвуковой луч получается за счет вращения вокруг оси ультразвукового преобразователя.
Получение ультразвука основано на обратном пьезоэлектрическом эффекте – изменении формы материала (обычно пьезокерамики) под действием электрического напряжения. При отсутствии электрического тока пьезоэлемент возвращается к исходной форме, а при изменении полярности вновь произойдет изменении формы, но в обратном направлении. Если к пьезоэлементу приложить импульсный ток, то элемент начнет с высокой частотой колебаться, генерируя ультразвуковые импульсы. Детектирование отраженных сигналов базируется на прямом пьезоэлектрическом эффекте. Возвращающиеся сигналы вызывают колебания пьезоэлемента, что приводит к появлению на его гранях переменного электрического тока. В этом случае пьезоэлемент функционирует как приемник сигналов. Один и тот же элемент может быть как приемником, так и излучателем.

