 2015-04-30
2015-04-30 2812
2812Асинхронный привод встроен в основание гентри компьютерного томографа.
Структура привода гентри компьютерного томографа изображена на рисунке 1.2.1.
На входе энергетического канала ППЧ (полупроводникового преобразователя частоты) установлен управляемый выпрямитель. Выпрямитель предназначен для питания трёхфазного инвертора, и обеспечивает выходное силовое напряжение = 280В.
После преобразования выпрямителем энергии переменного тока с постоянными значениями напряжения и частоты в энергию постоянного тока, она поступает на вход инвертора (АИН) и снова преобразуется в энергию трехфазного переменного тока, но уже с регулируемыми параметрами. Таким образом, трёхфазный инвертор питает асинхронный двигатель гентри компьютерного томографа переменным трёхфазным напряжением 220В (фазное), частотой 50Гц.
В ППЧ этого типа происходит двойное преобразование энергии, что несколько снижает его КПД, но другие существенные преимущества этих преобразователей обеспечивают им доминирующее положение в современном автоматизированном приводе. Для энергетической развязки выпрямителя и инвертора между ними обязательно устанавливают накопитель энергии – конденсатор (фильтр). Накопитель энергии необходим потому, что энергия постоянного тока чисто активная, а для формирования магнитных полей в двигателе нужен обмен реактивной энергией с источником питания, которую и обеспечивает накопитель. В данном случае инвертор работает в режиме источника напряжения (ИН).
В ППЧ с АИН переход АД в генераторный режим приведет к изменению направления тока в инверторе. В этом случае избыточная энергия не может быть возвращена в сеть через выпрямитель, т.к. его ключи обладают односторонней проводимостью. Тем не менее, более распространенными на практике являются ППЧ с АИН. Это связано с тем, что большая часть задач привода не требует работы АД в генераторном режиме, а кратковременные выходы в эту область связаны с умеренным количеством производимой энергии, которая может рассеиваться тормозным резистором.
Редуктор (Р) входит в состав привода и служит для снижения угловых скоростей ведомого вала с целью повышения крутящих моментов, обеспечивает требуемую скорость вращения генри компьютерного томографа (3 оборота в секунду).
Нагрузкой привода является гентри компьютерного томографа.
Инвертор имеет следующие уровни выходных величин:
· Выходное трёхфазное напряжение – 220В ± 10% (фазное), 50Гц ± 5%.
· Номинальная выходная мощность – 20 кВт.
· Максимальная выходная мощность – 25 кВт.
В качестве исполнительного двигателя может быть применен двигатель 4А180M6У3 Российского производства.
Параметры двигателя:
Напряжение питания двигателя (фазное) 220 В
Частота тока сети 50 Гц
Синхронная частота вращения 1000 об/мин
Номинальная мощность на валу двигателя 18.5 кВт
Номинальный коэффициент полезного действия 0.92
Скольжение при номинальной нагрузке 0.08
Номинальный ток статора 33 А
Электрическая схема силовой части привода гентри компьютерного томографа с частотным управлением приведена на рисунке 1.2.2.
Данная схема содержит: В - выпрямитель; АИН - автономный инвертор напряжения; АД – трехфазный асинхронный двигатель; УУП - устройство управления преобразователем частоты.
RS, RR – активные сопротивления обмоток статора и ротора соответственно.
LS, LR – индуктивности обмоток статора и ротора соответственно.
Силовая схема инвертора выполнена по трёхфазной мостовой схеме. Недостатком этой схемы является несинусоидальность выходного напряжения. Для улучшенной формы выходного напряжения применена широтно-импульсная модуляция.
Инвертор должен отвечать требованию: потребление тока по 220В ограничено выходной мощностью тиристорного преобразователя и не должно превышать 50А (мгновенное значение).
Сдвиг фаз между выходными напряжениями обеспечивается алгоритмом работы ключей, а частота регулируется тактовой частотой коммутации  , задаваемой устройством управления (УУП). Управление амплитудой напряжения осуществляется с помощью УВ. Как правило, каналы управления частотой и амплитудой в УУП соединены между собой через функциональный преобразователь, обеспечивающий требуемый закон управления
, задаваемой устройством управления (УУП). Управление амплитудой напряжения осуществляется с помощью УВ. Как правило, каналы управления частотой и амплитудой в УУП соединены между собой через функциональный преобразователь, обеспечивающий требуемый закон управления  .
.
Основным нагрузочным моментом в переходном режиме (при пуске) является динамический момент. В установившемся режиме нагрузка – момент вязкого и сухого трения. Момент вязкого трения (частотная зависимость) известна априорно. Возмущающее воздействие отсутствует. В этом случае целесообразно применить амплитудно-частотное управление, являющееся наиболее эффективным способом плавного регулирования частоты вращения трехфазных асинхронных двигателей.
При этом способе регулирования изменение частоты напряжения питания f1 должно сопровождаться изменением амплитуды напряжения питания. Причем законы изменения частоты и напряжения должны быть согласованы с частотной зависимостью изменения характера нагрузки.
Функциональная схема частотного управления электроприводом представлена на рис. 1.2.3.
Схема состоит из управляемого выпрямителя УВ, преобразующего сетевое напряжение переменного тока частотой 50 Гц в напряжение питания постоянного тока Uп, величина которого может регулироваться от устройства управления УУП, и автономного инвертора АИ, преобразующего напряжение Uп в трехфазное напряжение изменяемой частоты f1. Управляющее устройство, изменяя частоту f1в в зависимости от задания ω, изменяет также и напряжение Uп так, чтобы их отношение оставалось постоянным. Система управления может иметь обратную связь по скорости вращения через тахогенератор ТГ. Также кроме частоты вращения контролируется ток якоря от датчика тока (ДТ), что позволяет оставлять постоянным поток при изменении частоты f1 и нагрузки.
Асинхронные двигатели с короткозамкнутым ротором обычно пускаются в ход прямым включением в сеть с номинальным напряжением U1 = U1н. Процесс разбега ротора двигателя от неподвижного состояния (W=0, s=1) до номинальной угловой скорости Wн, определяется его механической характеристикой М = ¦(W) и механической характеристикой нагрузки Мв = ¦(W).
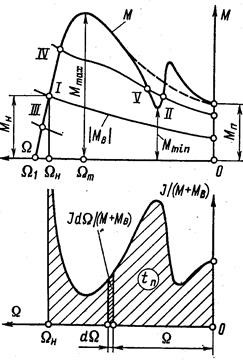 Пунктиром изображена идеальная характеристика момента при пренебрежении высшими гармоническими поля, сплошной линией – реальная механическая характеристика, построенная с учетом влияния высших гармоник поля.
Пунктиром изображена идеальная характеристика момента при пренебрежении высшими гармоническими поля, сплошной линией – реальная механическая характеристика, построенная с учетом влияния высших гармоник поля.
Добавочные вращающие моменты, связанные с высшими гармоническими поля, оказывают заметное влияние на ход характеристики, уменьшая результирующий вращающий момент при малых скоростях вращения. При слишком малом минимальном моменте механическая характеристика нагрузки может пересечься с характеристикой двигателя. В этом случае установится угловая скорость меньше номинальной, пуск не завершится переходом к угловой скорости, близкой к синхронной.
При прямом пуске крупных короткозамкнутых асинхронных двигателей от недостаточно мощной электрической сети пусковые токи могут вызвать недопустимо большое снижение напряжения, отчего могут пострадать другие потребители.
Исходя из этого, следует, что необходимо обеспечить такой закон управления для режима пуска, при котором кратность пускового тока будет минимальной.








