 2015-05-05
2015-05-05 702
7021) В системах автоматической стабилизации (САС) задающее воздействие остается постоянным. Основная задача – поддержание регулируемой величины, независимо от возмущений, на постоянном уровне с допустимой погрешностью – регулирование по возмущению.
САС характеризуются отклонением регулируемой величины – разностью между значением регулируемой величины в данный момент времени и ее заданным постоянным значением.
δ (t) = y (t) – уо.
Это дает качественную оценку динамическим свойствам САС.
На рисунке 3.2 дан график изменения регулируемой величины y(t). Пусть в момент времени t1 возмущающее воздействие f(t) скачком изменилось от величины F1 до величины F2 (прямая 1). Это вызовет изменение регулируемой величины у(t) (кривая 2) и отклонение ее от исходного значения у(t1). Тогда, в соответствии с определением, ордината ВС будет представлять отклонение регулируемой величины в момент времени t2.
Примером таких систем является система стабилизации температуры методической нагревательной печи прокатного стана.
 |
Рис. 3.2. Изменение параметров в системе автоматической стабилизации
Системы программного управления (СПУ) обеспечивают изменение регулируемой величины по наперед заданному закону – программе. Задающее воздействие является известной функцией времени или координат системы (рисунок 3.3).
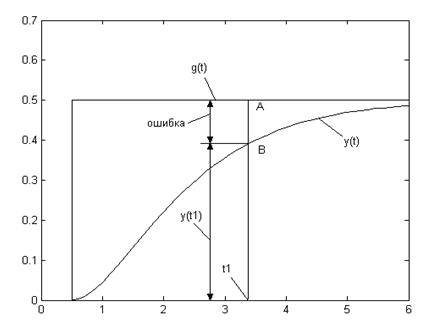 |
Рис. 3.3. Изменение параметров в системе программного управления
При управлении по заданию о точности работы системы судят по величине динамической ошибки, которая определяется как разность между задающим воздействием и регулируемой величиной в данный момент времени
δ (t) = g (t) – y (t).
Предположим, что задающее воздействие g(t) в момент времени t = 0 скачком изменилось от нуля до некоторой постоянной величины и в последующие моменты времени остается неизменным (линия 1). Это вызовет реакцию системы, определяемую кривой 2. Тогда ошибкой для момента времени t1 будет отрезок АВ.
Пример – система программного управления нажимным устройством реверсивного прокатного стана, которое обеспечивает изменение положения верхнего валка перед каждым проходом в соответствии с заданной программой обжатий.
В следящих системах задающее воздействие так же, как в системах программного управления, является переменной величиной. Однако источником задающего сигнала служит случайное внешнее воздействие.
Например, система синхронизации скорости каретки летучих ножниц со скоростью прокатки в последней клети непрерывного стана является следящей системой. В ней каретка «следит» за движением полосы.
Так как следящие системы предназначены для воспроизведения на выходе задающего воздействия с возможно большей точностью, то качество их работы тоже оценивают динамической ошибкой
δ (t) = g (f (t)) – y (t).








