 2015-05-05
2015-05-05 1213
1213Вращение является составляющей большинства рассматриваемых в механике движений. Каждый день мы являемся свидетелями великого космического вращения. Данные последних теоретических исследований говорят, что всё вокруг и мы сами по свойствам напоминаем вращающиеся с большой частотой поля.
Динамические характеристики – момент силы и момент импульса, используемые при описании вращательного движения, играют в теории вращательного движения такую же большую роль, как ую сила и импульс играют в динамике поступательного движения.
Рис. 4.8
Известно, что передвинуть массивный предмет (например, ящик) вручную тяжело, гораздо легче передвинуть его с помощью длинной палки, трубы (лома), т.е. перекантовать с помощью рычага, причем, чем длинней этот рычаг, тем легче это сделать (прикладывается меньшая сила при большей длине рычага (см. рис. 4.8)). Вспомним знаменитое изречение Архимеда (ок. 286–212 гг. до н.э.): «Дайте мне точку опоры (и рычаг) и я переверну Землю».
Другой пример – взвешивание предметов на весах (см. рис. 4.9): при равных плечах (силы) весов li перевесит тот груз, масса которого mi больше, а если массы грузов равны, то перевесит груз, для которого плечо силы li больше.
Рис. 4.9
Следует различать момент силы и момент импульса относительно точки и относительно оси, в первом случае – это вектора, а во втором – проекции векторов (скаляры).
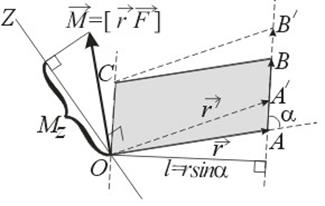
Рис. 4.10
Пусть дана точка О (полюс), относительно которой находится момент силы. Моментом силы  относительно точки О называется векторное произведение (вектор) радиуса-вектора
относительно точки О называется векторное произведение (вектор) радиуса-вектора  , проведенного из точки О в точку А приложения силы на вектор :
, проведенного из точки О в точку А приложения силы на вектор :
 (4.16)
(4.16)
Модуль момента силы:
 , (4.17)
, (4.17)
где l=rsina – кратчайшее расстояние до линии АВ действия силы (рис.4.10), называемое плечо м силы l.
При этом вектор  не изменится, если точку приложения силы перенести в любую другую точку, расположенную на линии действия силы, например в точку А/. При этом параллелограмм ОАВС перейдет в параллелограмм ОА/В/С. Оба параллелограмма имеют одинаковые основание и высоту, а следовательно, и площадь.
не изменится, если точку приложения силы перенести в любую другую точку, расположенную на линии действия силы, например в точку А/. При этом параллелограмм ОАВС перейдет в параллелограмм ОА/В/С. Оба параллелограмма имеют одинаковые основание и высоту, а следовательно, и площадь.
В отличие от полярных векторов  (именно их изучают в школе), вектора, характеризующие вращательное движение
(именно их изучают в школе), вектора, характеризующие вращательное движение  , не имеют конкретной точки приложения (см. также лекция 1, п. 1), их называют скользящими. Так, вектор можно откладывать от любой точки параллельно одному из направлений, полученному в результате векторного произведения (по свойствам векторного произведения перпендикулярно плоскости, в которой лежат два перемножаемых вектора –
, не имеют конкретной точки приложения (см. также лекция 1, п. 1), их называют скользящими. Так, вектор можно откладывать от любой точки параллельно одному из направлений, полученному в результате векторного произведения (по свойствам векторного произведения перпендикулярно плоскости, в которой лежат два перемножаемых вектора –  ), направление вектора совпадает с направлением поступательного движения правого винта при его вращении от вектора к (в математике термин – «левая тройка»).
), направление вектора совпадает с направлением поступательного движения правого винта при его вращении от вектора к (в математике термин – «левая тройка»).
Главным моментом нескольких внешних сил,действующих на систему, относительно точки О называется сумма моментов их относительно этой точки (принцип независимости действия сил):
 , (4.18)
, (4.18)
где силы  считают приложенными к одной точке О, что можно получить путем параллельного переноса векторов (часто в механике для удобства при решении задач силы рассматривают как приложенные к центру масс тела, хотя это не для всех сил так, пример – сила трения
считают приложенными к одной точке О, что можно получить путем параллельного переноса векторов (часто в механике для удобства при решении задач силы рассматривают как приложенные к центру масс тела, хотя это не для всех сил так, пример – сила трения  приложена к поверхности тела).
приложена к поверхности тела).
При вращении ТТ (системы материальных точек) необходимо учитывать только внешние силы, так как внутренние силы взаимодействия двух любых элементов ТТ (системы) всегда равны по модулю (величине) и противонаправлены вдоль одной прямой (их векторная (геометрическая) сумма равна нулю).
Аналогично вышесказанному можно определить момент импульса относительно точки (вектор  ) и относительно оси (проекция вектора Lz):
) и относительно оси (проекция вектора Lz):
 , (4.19)
, (4.19)
где  – импульс (материальной) точки А,
– импульс (материальной) точки А,  . Важно отметить, что моментом импульса относительно точки может обладать и тело, движущееся поступательно (достаточно наличие импульса и плеча). Тело, обладающее импульсом, может не обладать моментом импульса относительно одних точек (в отсутствие плеча) и обладать относительно других.
. Важно отметить, что моментом импульса относительно точки может обладать и тело, движущееся поступательно (достаточно наличие импульса и плеча). Тело, обладающее импульсом, может не обладать моментом импульса относительно одних точек (в отсутствие плеча) и обладать относительно других.
Единицы измерения [М]=Н×м (не путать с [А]=Дж=Н×м), а  .
.
В общем случае  (неколлинеарна) и , т.е. и
(неколлинеарна) и , т.е. и  , но если полюс (точка) О неподвижен, то импульс
, но если полюс (точка) О неподвижен, то импульс  точки А сонаправлен с ее скоростью
точки А сонаправлен с ее скоростью  , тогда:
, тогда:
 ,
,
т.к.  ,
,
то есть получают основное уравнение динамики вращательного движения:
 . (4.20)
. (4.20)
Этот закон остается справедливым и для системы материальных точек, в этом случае
 и
и  . (4.21)
. (4.21)
Особенность вращения ТТ, по сравнению с системой несвязанных друг с другом материальных точек, заключается в том, что при вращении ТТ вокруг неподвижной оси все его элементы движутся по окружностям, причем угловая скорость вращения  для них одинакова (а линейная различная). Поэтому естественным будет выразить вектор через скорость .
для них одинакова (а линейная различная). Поэтому естественным будет выразить вектор через скорость .
Рис. 4.11.
Разобьем ТТ (рис. 4.11), вращающееся относительно оси ОО /, на элементы (материальные точки). Момент импульса каждого элемента
 .
.
С учетом равенства 
 .
.
В математике известно, что двойное векторное произведение имеет вид
 ,
,
т.е.  .
.
Таким образом,
 , (4.22)
, (4.22)
где DIi – момент инерции i –го элемента.
Суммируя (интегрируя) по всем элементам, получают:
 . (4.23)
. (4.23)
С учетом формул (4.20) и (4.23) получаем еще одну форму записи основного уравнения динамики вращательного движения:
 , (4.24)
, (4.24)
где e – угловое ускорение.
При вращении ТТ (системы материальных точек) необходимо учитывать только внешние силы, так как внутренние силы взаимодействия двух любых элементов ТТ (системы) всегда равны по модулю (величине) и противонаправлены вдоль одной прямой (их векторная (геометрическая) сумма равна нулю). Согласно уравнению (4.21) для замкнутой системы имеем:
 , (4.25)
, (4.25)
т.е.  .
.
Значит, для замкнутых систем выполняется закон сохранения момента импульса.

