 2015-05-06
2015-05-06 1837
1837По характеру движения массы деталей кривошипно-шатунного механизма можно разделить на движущиеся возвратно-поступательно (поршневая группа и верхняя головка шатуна); совершающие вращательное движение (коленчатый вал и нижняя головка шатуна) и совершающие сложное плоскопараллельное движение (стержень шатуна).
Для упрощения динамического расчета действительный кривошипно-шатунный механизм заменяется эквивалентной системой сосредоточенных масс.
Массу поршневой группы  считают сосредоточенной на оси поршневого пальца в точке А (рис. 9а). Массу шатунной группы
считают сосредоточенной на оси поршневого пальца в точке А (рис. 9а). Массу шатунной группы  заменяют двумя массами, одна из которых (
заменяют двумя массами, одна из которых ( ) сосредоточена на оси поршневого пальца в точке А, а другая () – на оси кривошипа в точке В.
) сосредоточена на оси поршневого пальца в точке А, а другая () – на оси кривошипа в точке В.
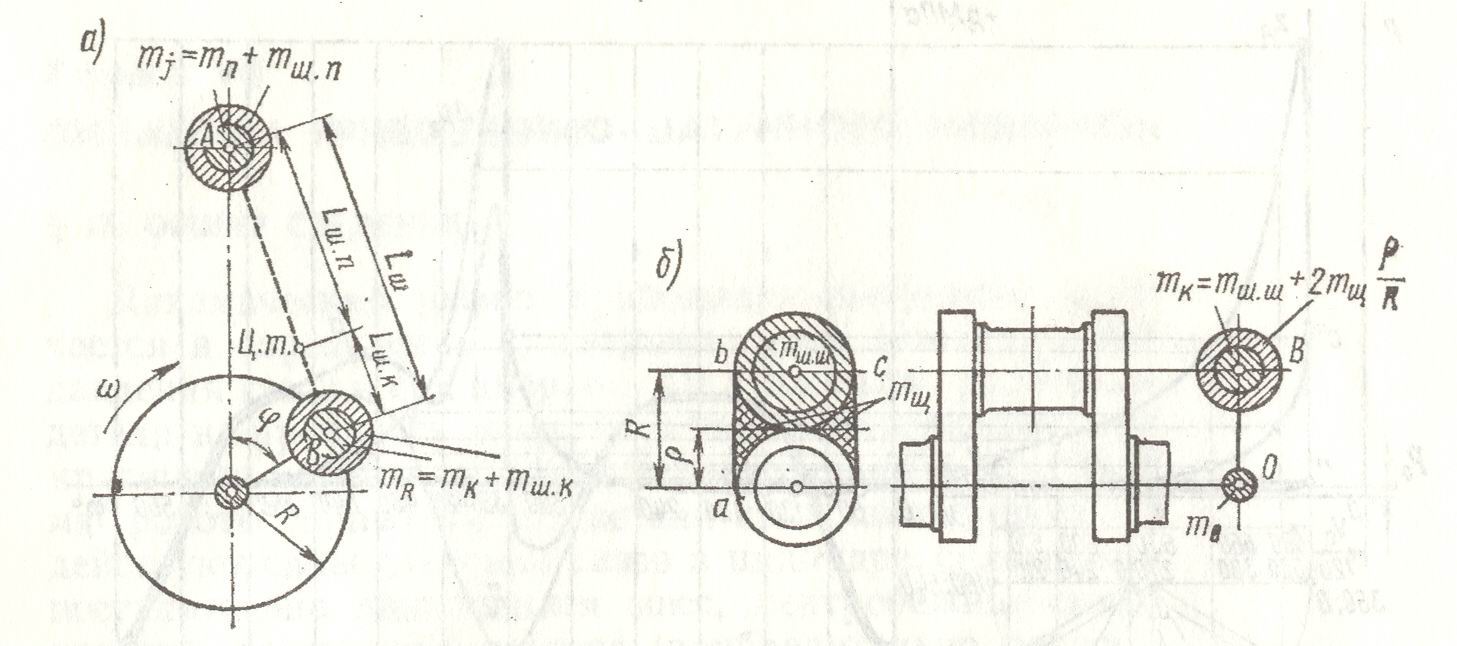
Рис. 6 – Система сосредоточенных масс, динамически эквивалентная КШМ:
а – приведенная система КШМ, б – приведение масс кривошипа
Для большинства автомобильных и тракторных двигателей при расчетах можно принимать  , а
, а  .
.
Массу кривошипа заменяют двумя массами, сосредоточенными на оси кривошипа в точке В ( ) и на оси коренной шейки в точке О (
) и на оси коренной шейки в точке О ( ) (рис. 9б).
) (рис. 9б).
Таким образом, система сосредоточенных масс, динамически эквивалентная кривошипно-шатунному механизму, состоит из массы  , сосредоточенной в точке А и имеющей возвратно-поступательное движение, и массы
, сосредоточенной в точке А и имеющей возвратно-поступательное движение, и массы  (для рядного двигателя, согласно [2]).
(для рядного двигателя, согласно [2]).
При выполнении динамического расчета двигателя значения , , подсчитываются с чертежа, либо выбираются из стандартных значений.
Выберем , , из рекомендованных значений [2], затем уточним методом экстраполяции.
Тогда





 .
.
 .
.








