 2015-05-06
2015-05-06 1207
1207Алматы 2011ж
«Көліктік техника динамикасы» пәнінен оқу-әдістемелік кешені, 05В071300 «Көлік, көлік техникасы және технологиясы» мамандығына. Алматы: ҚазҰТУ-2011ж.-80бет.
Құрастырғандар: Сурашов Нұрғали Толымбекұлы техника ғылымдарының докторы, «Көтеру-тасымалдау машиналары және гидравлика» кафедрасының меңгерушісі, Қ.И.Сәтпаев атындағы ҚазҰТУ, Гудович Михаил Иванович т ехника ғылымдарының кандидаты, «Көтеру-тасымалдау машиналары және гидравлика» кафедрасының доценті, Қ.И.Сәтпаев атындағы ҚазҰТУ, Жұманов Мерген Әмірұлы техника ғылымдарының кандидаты, «Көтеру-тасымалдау машиналары және гидравлика» кафедрасының доценті, Қ.И.Сәтпаев атындағы ҚазҰТУ.
Аңдатпа:
«Көліктік техника динамикасы» пәнінің» оқу-әдістемелік кешені, осы пәннің оқу бағдарламасынан «Syllabus»,курстың тақырыптық жоспарынан, дәріс конспектісінен, зертханалық және тәжірибелік сабақ жоспатынан, өзін-өзі бақылауға арналған тесттерден, жазба жұмыстарынан және сұрақтар тізімінен тұрады.
Осы ОӘК берiктiктiң есепке алуы бар көлiк техникасы элементтерi, тербелiстер және деформацияланатын жүйелердiң орнықтылығындағы динамикалық жүктемелердiң анықтауы бойынша студенттердiң сапалы және квалификациялы әзiрлеуiн қамтамасыз етуге мүмкiндiк бередi.
Студенттер ой-өрiсiнiң кеңейтулерi үшiн кеңес берiлетiн әдебиеттердi қолдана алады. ОӘК үшiн материалдың таңдауында көлiктік техника динамикасын үйрететiн, студент жалпы техникалық пәндер бойынша жеткiлiктi әзiрлеудi алып үлгеретiнiн ескерген.
Бұл машиналардың элементтерiнiң олардың берiктiгiне динамикалық жүктемелердiң дербес бағалауы және ықпал үшiн маман-машина жасаушыларға қажеттi тағы басқа мәлiметтер жобалауға, жасауға және көлiк техниканың пайдалануы бойынша нақты есептер шешуге мүмкiндiк бере алады.
Қ.И.Сәтпаев атындағы Қазақ Ұлттық Техникалық Университеті, 2011ж.
Авторлары Н.Т. Сурашов, М.И. Гудович, М.Ә. Жұмановтың 050713- «Көлік, көліктік техника және технология» мамандығының бакалавриаттарына арналған «Көліктік техника динамикасы» пәні бойынша оқу-әдістемелік кешеніне
Пікір
«Көліктік техника динамикасы» пәнінің оқу-әдістемелік кешені пәннің жұмыстық бағдарламасынан (Syllabus), курстың тақырыптық жоспарынан,студенттердің өз бетінше жұмыстарына арналған тапсырмалар жүйесінен, пән бойынша есеп беру жұмыстарын орындау графигінен, өзін-өзі тексеруге арналған тестік тапсырмалардан, жазба жұмыстарының тақырыптары және бақылау сұрақтарынан тұрады.
Көлiктік техника динамикасы пәнi студенттерге динамикалық жүктемелердi есепке алуы бойынша құрастыруға қажеттi көлiк техникасын есептеуге бағытталған және машиналардың тұрақты жұмыс тәртiбi шарттарындағы берiктiк, орнықтылық және тербелiс элементтерiн зерттеуді үйретеді.
Оқу-әдiстемелiк кешені негiзiнен биiк кәсiби деңгейде жасалған, көлiк техниканың динамикасының пәнінiң оқу бағдарламасының мазмұнын қамтып көрсетедi. Қ.И.Сатпаев атындағы Қазақ Ұлттық техникалық университетiнiң оқу-әдiстемелiк департаментiнiң талаптарымен сәйкес құралған және ашық жариялауына ұсынылады.
Зав. кафедрой «АДТиС»
КазАТК имени М.Тынышпаева
д.т.н., профессор М.С. Кульгильдинов
1. SYLLABUS- ПӘННІҢ ОҚУ БАҒДАРЛАМАСЫ
1.1. Оқытушылар туралы мәліметтер:
1. Сурашов Нұрғали Толымбекұлы - профессор, техника ғылымдарының докторы.
2. Гудович Михаил Иванович – доцент, техника ғылымдарының кандидаты.
3. Жұманов Мерген Әмірұлы – доцент, техника ғылымдарының кандидаты.
Кафедрада болу уақыты: сабақ кестесіне сәйкес.
1.2. Пән туралы мәлімет:
Аталуы «Көліктік техника динамикасы».
Кредит саны 3.
Жүргізу орны: ҚазҰТУ,ИПИ, 305аудитория.
1кесте
Оқу жоспарынан көшірме
| Курс | Семестр | Кредит | Аптадағы академиялық сағаттар | Бақылау түрі | |||||
| Дәрістер | Зерт. сабақ | Тәжіриб. сабақтар | СӨЖ | СОӨЖ | Барлығ ы | ||||
| Емтихан |
1.3. Предреквизиты: -материалдар кедергісі, теориялық механика, машиналар мен механизмдер теориясы, машина бөлшектері,сұйық және газ механикасы, гидравлика және аэродинамика, гидропневмопривод.
1.4.Постреквизиты: -көтеру-тасымалдау машиналары, ПТСДМ өндірісінің технологиясы,жүк көтеру және үздіксіз тасымалдау машиналары, арнайы көлік техникасы, автотранспорт құрылғыларын жобалау.
1.5. Пәннің қысқаша түсіндірмесі.
«Көліктік техника динамикасы» пәні «050713 – көлік, көлік техникасы және технологиясы» мамандығының студенттерін дайындағанда ең маңызды пән болып табылады.
Пәнді оқыту мақсаты болып әр түрлі жүктердерді көтеруде және орын ауыстыруы бойынша жұмыстардың өнімділігін анықтау,динамикалық әсерлер мен процестерді есепке алу, көліктік техника параметрлеріне техникалық-экономикалық құрастырулар орындау болып табылады.
1.6. Тапсырмалар түрлері мен тізімі және оларды орындау графигі
2 кесте.
| Бақылау түрі | Жұмыстың түрі | Жұмыстың тақырыбы | Ұсынылған әдебиет | Тапсыру мерзімі |
| Ағынды бақылау | №1зерт. жұмыс | Машина элементтерінің инерциал моменті мен сермеу моменті | [6], 72-77бет | 1 апта |
| №2зерт. жұмыс | Машинаның құрылымдық элементінің қосынды келтірілген қатаңдықтары | [6], 88-91бет | 3 апта | |
| ЖКМ-нің көтеру механизмінің келтірілген сұлбасын құру | ||||
| №3зерт. жұмыс | [6], 91-92бет | 5 апта | ||
| №4зерт. жұмыс | Пневмодөңгелекті машинаны орнынан қозғалтқандағы трансмиссия элементіне максимал динамикалық жүктелу | [6], 289бет | 7 апта | |
| №5 зерт. жұмыс | Айдау кезінде кран арбасының білігі қабылдайтын максимал динамикалық жүктеме | [6], 288бет | 9 апта | |
| №6 зерт. жұмыс | Екі осьті дөңгелекті тартқыш жетегінің айналу бөліктерінің инерция моменті мен қосынды келтірілген массасы | [6], 72-76бет | 11 апта | |
| №7 зерт. жұмыс | Бульдозер металқұрылымына оны артық жүктелуінен сақтау мақсатында енгізілген серпімді элементінің қатаңдығы | [2], 153-154бет | 13 апта | |
| №8 зерт. жұмыс | Автосамосвал жүріс бөлігіне, оның кузовының түбіне жүктің түсуі кезінде максимал жүктелу | [6], 115-116бет | 14 апта | |
| Ағынды бақылау | №1 тәжірибелік жұмыс | Көпірлі кранның көтеру механизмінің біліктеріне келтірілген динамикалық параметрлерді анықтау | [10], 149-150бет | 1 апта |
| №2 тәжірибелік жұмыс | Іске қосу кезіндегі кран арбаның қозғалу механизмінің элементіне динамикалық жүктелуді анықтау | [4], 241-244бет | 2 апта | |
| №3 тәжірибелік жұмыс | Айдау және тежеу кезінде кранның бұрылу бөлігі мен айналу механизмі элементіне динамикалық жүктелуді анықтау | [6], 280-281бет | 3 апта | |
| №4 тәжірибелік жұмыс | «Салмақтар» және «қармаушылар» жүкті көтеру кезінде жүккөтеру шығырының арқанының динамикалық жүктелуін анықтау | [4], с.259 | 4 апта | |
| №5 тәжірибелік жұмыс | Іске қосу мен тежеу кезінде лифт арқанның артық жүктелуін анықтау | [4], 245-247бет | 5 апта | |
| №6 тәжірибелік жұмыс | Жүк көтеру крандарының көтеру механизмінің металл құрылымының серпінділігін ескерудегі есебі | [1], 254-258бет | 6 апта |
2кестенің жалғасы
| №7 тәжірибелік жұмыс | Ауыр трассалы конвейердің динамикалық параметрлерін анықтау | [5], 168-171бет | 7 апта | |
| №8 тәжірибелік жұмыс | Порционды сыналған ковейер қырғышының динамикалық параметрін анықтау | [5], 187-190бет | 8 апта | |
| №9 тәжірибелік жұмыс | Кездейсоқ түсіру кезінде арқандағы драглайн шөмішінің тербеліс параметрінің есебі | [12], 107-117бет | 9 апта | |
| №10 тәжірибелік жұмыс | ДТ -54 тракторлы Д-354 скрепер жұмыс органымен ілінісу қондырғысына әсер ететін динамикалық жүктелуін анықтау | [2], 146-148бет | 10 апта | |
| №11 тәжірибелік жұмыс | Абсолют қатты кедергімен кездескендегі Д-159 бульдозерге әсер ететін динамикалық жүктемені анықтау | [2], 149-152бет | 11 апта | |
| №12 тәжірибелік жұмыс | Тежеуге еңістелген қозғалыс кезіндегі фронталь бір шөмішті жүк тиегіштің динамикалық табандылығын анықтау. | [6], 350-352бет | 12 апта | |
| №13 тәжірибелік жұмыс | Орнынан қозғалтқандағы автокөлік трансмиссиясының максимал динамикалық жүктемені анықтау | [4], 255-256бет | 13 апта | |
| №14 тәжірибелік жұмыс | Жүкті платформа ортасында түсіргендегі жүк автомашинасының рессоры мен баллондарының максималды жүктемесін анықтау | [4], 265-266бет | 14 апта | |
| Аралық бақылау | АБ | Күн тізбелік жоспар бойынша | 6, 14 апта | |
| Қорытынды бақылау | Емтихан | Өткен тақырыптар бойынша | 15 апта |
1.7. Әдебиеттер тізімі
Негізгі әдебиеттер:
1. Вайнсон А.А. Подъемно-транспортные машины – М.: Машиностроение, 1989. -369 с.
2. Холодов А.М. Основы динамики землеройно-транспортных машин. – М.: Машиностроение, 1989. -180 с.
3. Александров М.П. и др. Грузоподъемные машины.- М.: Машиностроение, 1986. -400 с.
4. Комаров М.С. Динамика механизмов и машин.- М.: Машиностроение, 1969. -236 с.
5. Зенков Р.Л., Ивашков И.И., Колобов Л.Н. Машины непрерывного транспорта. -М.: Машиностроение, 1987. -431 с.
6. Гоберман Л.А. Основы теории, расчета и проектирования строительных и дорожных машин.- М.: Машиностроение, 1988. -464 с.
7. Омаров К.А., Саргужин М.Х. и др. Динамика конвейеров с канатным тяговым органом.- Алматы: КазГАСА, 2002. -141 с.
Қосымша әдебиеттер:
Волков Д.П. Динамические нагрузки в универсальных экскаваторах-кранах.- М.: Машгиз, 1958. -268 с.
8. Штокман И.Г. (ред.). Расчет и конструирование горных транспортных машин и комплексов.- М.: Недра, 1975. -467 с.
9. Иванченко Ф.К. Конструкция и расчет подъемно-транспортных машин.- К.: Выща шк., 1988. -424 с.
10. Проскурин А.И. Теория автомобиля. Примеры и задачи.- Ростов-на-Дону: Феникс, 2006. -301 с.
11. Домбровский Н.Г., Картвелишвили Ю.Л. Строительные машины.- М.: Машиностроение, 1976. -285 с.
12. Скотников В.А. и др. Основы теории и расчета трактора и автомобиля.- М: Агропромиздат, 1986. -303 с.
13. Есенжанов С.З. Основы теории колесных и гусеничных машин.- Алматы: КазГОСАГРУ, 2001. -144 с.
1.8. Білімді бақылау және бағалау
Кредиттік технологиямен оқыту бойынша студенттің білімін рейтингті бақылау арқылы жүргізеді.
100-баллды рейтингтік шкала бойынша бағаланады.Бақылаудың мынадай түрлері бар: ағымдағы, аралық және қорытынды.
Бақылау бойынша рейтинг балдарының үлестірілуі
3кесте
| Варианттар № | Қорытынды бақылау түрі | Бақылау түрі | Баллдар % |
| Емтихан | Қорытынды бақылау | ||
| Аралық бақылау | |||
| Ағынды бақылау |
Ағынды бақылау нәтижелерін тапсыру мерзімдері оқу үрдісінің күн тізбелік графигімен анықталады (4кесте). Ағынды бақылау саны пәннің оқу-әдістемелік кешенінде кқрсетілгендей мазмұнына және оның көлеміне қарай анықталады.
4кесте
«Көліктік техника динамикасы» пәні бойынша бақылаудың барлық түрлерін тапсырудың күн тізбелік графигі
| Апта | |||||||||||||||
| Бақылау түрлері | З1 Т1 | Т2 | З2 Т3 | Т4 | З3 Т5 | АБ Т6 | З4 Т7 | Т8 | З5 Т9 | Т10 | З6 Т11 | Т12 | З7 Т13 | АБ2 Т14 | З8 |
| Апта, бақылау саны | |||||||||||||||
| Бақылау түрі: ЗЖ-зертханалық жұмыс; ТЖ-тәжірибелік жұмыс; АБ- аралық бақылау. |
5 кесте
Студенттің білімін бағалау
| Баға | Әріптік эквивалент | Рейтингті балл (%) | Баллмен |
| Өте жақсы | А | 95-100 | |
| А- | 90-94 | 3,67 | |
| Жақсы | В+ | 85-89 | 3,33 |
| В | 80-84 | 3,0 | |
| В- | 75-79 | 2,67 | |
| Қанағаттанарлық | С+ | 70-74 | 2,33 |
| С | 65-69 | 2,0 | |
| С- | 60-64 | 1,67 | |
| D+ | 55-59 | 1,33 | |
| D | 50-58 | ||
| Қанағаттанарлықсыз | F | 0-49 |
Модуль бойынша бақылау жүргізуге арналған сұрақтар тізімі.
1 модуль:
1. Машина құрылымының динамикалық есебін неден бастайды?
2. Тербелу жүйесінде динамикалық үдерісті талдау тапсырмаларды орындау кезінде не болады?
3. Механикалық жүйе кезінде қозғалу массасының кинетикалық энергиясы шешімін жазыңыз.
4. Машинаның инерциялық моменті және келтірілген массасы анықталған және қандай шарттар келтірілген?
5. Жүк көтергіш крандардың тербелу үдерісі кезінде пайда болатын факторларды атаңыз
6. Ленталы конвейердің динамикалық қасиетінің туындауы туралы қандай негізгі факторлары бар?
2 модуль:
1. Пайдаланудың әр түрлi шарттарындағы жер қазатын-көлiк машиналардың бөлшектерінің жұмыс iстейтiн жүктемелердiң классификациясын келтiрiңiз.
2. Cалпыншағы бар ЗТМ-нің құрылысының ортақ қаттылығына қай элементтің қаттылығы ықпал етеді?
3. Динамикалық жүктемелерді анықтау үшін бульдозердің трансмиссиясының есептік сұлбасында қанша масса есепке алынуы керек?
4. Жер қазатын көлік машинасының динамикасының келтірілген буыны ретінде қандай элементі қабылданады?
5. ЗТМ-нің жер қазуы кезінде пайда болатын кедергілерді атаңыз.
6. ЗТМ-ге әсер ететін қандай жүктемелер кездейсоқ дәрежеге жатқызылады?
3 модуль:
1. Трактордың және автокөлiктердің тербелiсiне тәуелдi болатын факторларды атаңыз.
2. Автокөлiктiң рессор қойылған массаларының коэффициенттерi деп нені айтамыз?
3. Лагранж формасындағы трактордың және автокөлiктердің қозғалысының теңдеуін жазыныз.
4. Машинаның тарту балансы өрнегiн жазыңыз.
5.Автокөліктің рессор қойылған массаларының тығыздығына қандай параметрлер әсер етеді?
Аралық аттестацияға арналған сұрақтар:
1.Нақты жүйеден келтірілген динамикалық жүйеге өту кезінде сыртқы жүктемелердің келтірілуі қандай негізде өндіріліп алынады?
2. Машина элементтерінің қаттылығы қандай параметрлермен бейнеленеді? 3. Көлденең тербелiстердiң оларында шынжырлардың топсаларының үлкен жылдамдығы және пайда болудың жанында шынжырлы конвейерлердегi қираудың себебiн атаңыз.
4. Машинаның қабылданған есептiк динамикалық схемасының ақиқаттығының белгiсi болып не табылады?
5. Бульдозердің жұмыс органыны алынбас кедергіге кездессе қандай жағдай болуы мүмкін?
6. Динамикалық есептік схема жүргізген кезде массалардың орталық келтірілуі ретінде қай элемент жиі таңдалады?
Курс саясаты мен процедурасы
Студентке қойылатын талаптар:
- сабаққа міндетті түрде қатысу;
- бақылаудың барлық түрлері бойынша өз уақытында есеп беру;
- өткізіп алған сабақтарды өтеу.
2. ӘСЕРЛІК ҮЛЕСТІРІЛЕТІН МАТЕРИАЛДАР МАЗМҰНЫ
2.1. Курстың тақырыптық жоспары.
6кесте
| № | Тақырыптың аталуы | Академиялық сағаттар саны | ||||
| Дәріс | Зерт. | Тәжірибе. | СОӨЖ | СӨЖ | ||
| Кiрiспе. Көлiктік техниканың жұмыс процессі кезінде пайда болатын динамикалық жүктемелер. | ||||||
| Машиналар және тетiктердiң динамикалық схемаларының есептеуін құрастыруы. Күштер, массалар, инерция моментi, қаттылықтардың келтiруi. | ||||||
| Автокөлік пен механизмдердің жалпы динамикалық теңдеуі | ||||||
| Крандардың көтеру және жүктердi түсiруiн динамика тетiктердiң аумалы-төкпелi жұмыс тәртiптерiнде | ||||||
| Жүктiң крандар және солқылдақ аспасы бар арбаларының орын ауыстыруының тетiктерiнiң динамикасы | ||||||
| Бұрылатын кранның бiр бөлiгiнiң айналуын тетiктiң динамикасы таратып жiберу және тоқтатуда | ||||||
| Өтпелі жұмыс режиміндегі таспалы конвейнрлердің динамикасы | ||||||
| Конвейер таспасындағы динамикалық күштер мен толқынды үрдістер | - | |||||
| Шынжырлы тартым органы бар конвейер динамикасы | ||||||
| Шынжырлы конвейердің тартым элементінің қозғалыс теңдеуі | - | |||||
| Жер қазатын – тасымалдау машиналарының динамикасының негіздері |
6 кестенің жалғасы
| Қатаң ауыр кедергісі бар ЖҚТМ ара қатынасы | - | |||||
| Трактордың және автокөліктің қозғалыс теңдеуі | - | |||||
| Машина-тракторлы агрегаттың орнатылмаған жүктемесі кезіндегі жетекші моментті анықтау | ||||||
| Трактор және автокөліктің тербелістері туралы негізгі мәліметтер. Тербеліс теңдеуі | - | |||||
| Барлық сағат |
2.2 ДӘРІС САБАҚТАРЫНЫҢ КОНСПЕКТІСІ
1-тақырып. Кiрiспе. Көлiктік техниканың жұмыс процессі кезінде пайда болатын динамикалық жүктемелер.
Көлiк техникасы атқарылатын технологиялық үдерiстерге, техникалық-экономикалық көрсеткiштерге сәйкес келуi керек. Алайда бұл көрсеткiштердi жоғарылату жұмыс органдарының қозғалыс жылдамдығының ұлғаюына, олардың жылдамдығының өсу периодын және тежелуін қысқартуға әкеліп соғады. Осы факторлар машина құралымы элементтерiндегi динамикалық жүктемелерін ұлғайтуға және салмағын төмендетуге кедергі келтіруге және басқа көрсеткiштердiң жақсаруына мүмкіндік береді.
Көліктік технка жұмыс режимі бойынша көтеру тасымалдау,жер қазушы-тасымалдау, құрылыс жол машиналары, тракторлар және автомобильдер болып бөлінеді. Көтеру тасымалдау машиналары екі негізгі класқа бөлінеді: жүк көтергіш машиналар - периодты режимде жұмыс істейтін және жүктерді тігінен орын ауыстыруға және қызмет көрсетілген машинаның белгілі бір нүктесінен екіншісіне беруге арналған машиналар; үздіксіз тасымалдайтын машиналар – берілген трасса бойынша жүктерді тасымалдауға және басқа да жұмыстарға арналған.
Жер қазуға арналған тасымалдау машиналары қарапайым түрде қолданылады, бірақ жер, құрылыс, тау-кен және өнеркәсіптің басқа да салаларында жоғары тиімділікті механизациялау құралдары ретінде пайдаланылады. Оған бульдозерлер, скреперлер, автогрейдерлер жатады.
Құрылыс-жол машиналары жол құрылыс саласындағы тиеу-түсіру тасымалдау жұмыстарын автоматизациялау мен механизациялау үшін қолданылады. Олар тиеу-түсіру, жер қазу, жол машиналары болып бөлінеді. Жер қазу машиналарына бір шөмішті және көп шөмішті, экскаваторлар, адымдаушы драглайндар жатады.
Трактор және автокөлiктер, негiзiнде, құрылыста және өнеркәсіптің әр түрлі салаларында тасымалдау операцияларын механикаландыру үшін арналған. Бұл машиналар келесі кластарға бөлінеді: жүк автомобильдері, шынжыр табанды және дөңгелекті тракторлар, пневмодөңгелекті тартқыштар, арнайыландырылған көлiк құралдары.
Қазiргi көлiк техниканың 60% ақаулары, негiзiнде, жүк көтергiш металлоконструкциялар және механизм бөлшектерiн қажып қиратуға ретсiз қалдық деформациялардың пайда болуына, үйкелетiн элементтердiң жоғары тозуына алып келетін динамикалық жүктемелермен және т.б. байланысты.
Нақты машина динамикасын зерттеу үшiн (арқандар, бiлiктер, таспа тағы басқалар) серпiмдi массасыз байланыс бiрлескен бiрнеше шоғырланған (қозғалтқыштың роторы, тежегiш шкив, жұмыс буындары) массалардың өзiмен ұсынатын физикалық үлгiлермен алмастырылады. Сыртқы жүктемелердiң серпiмдi элементтерi (электр қозғалтқышы және тежеуiш, жұмыс машинасының кедергiлерiнiң моменттерi) әсерлерімен деформацияланады, машиналардың шоғырланған массалары негiзгi қозғалыстан басқа аз тербелiстердi жасайды.
Көптеген көлiк техника тетiктерiнің динамикалық жүктемелер шешушi мәндердi алады. Нақты жүктемелердi бiлу жақсартылған параметрлерi бар машиналардың сенiмдi конструкцияларын құруға мүмкiндiк бередi, пайдалану кезінде - берiктiк және қуат резервтерiн қисынды қолдану арқылы ең үлкен өнiмдiлiкке жетуге болады.
Негiзгi әдебиет [3,бет.317... 319]
Қосымша әдебиет [10, бет.31... 34]
Бақылау сұрақтары:
1. Жұмыс режимі бойынша көлiк техниканың классификациясын келтiрiңiз.
2. Динамиканың зерттеулерi үшiн нақты машиналарды алмастыратын физикалық үлгi қандай болады?
3. Көлiк техниканың динамикалық есептеулерiнiң басты мақсаты қандай?
2- тақырып. Машиналар және тетiктердiң динамикалық сұлбаларының есептеуін құрастыру. Күштер, массалар, инерция моментi, қаттылықтардың келтiрілуi.
Динамикалық есептеу машинаның есептi динамикалық сұлбасының құрастырылуы және сұлбаны кiретiн массалардың қозғалысының теңдеулерiмен бастайды. Есептi динамикалық сұлбаға нақты машиналардан сол нақты есептi тәртiп үшiн алатын физикалық факторлар маңызды емес. Есептiк сұлба таңдау жұмыс есептеудiң есебiмен анықталады. Есептi динамикалық сұлбадағы машиналардың нақты параметрлерi (масса, қаттылық, көнбістiктiң коэффициенттерi тағы сол сияқтылар), сонымен бiрге сыртқы жүктемелер есептi теңдеулердiң жеңiлдетуi және олардың арақатынасы келтiрiлген шамалармен алмастырады. Параметрлер және жүктемелердiң келтiруi келтiрiлген жүйенiң теңдiк негiзiнде ортақ энергиялары өндiрiп алады. Келтiру iлгерiлемелi қозғалысқа немесе тетiк массаларының айналма қозғалысынан да өндiрiп алады.
Есептiк сұлбадағы қабылданған ақиқат критериялары теориялық есептеулер мен тәжірибе нәтижелерiн салыстыру болып табылады.
Келтiрiлген күштер өздері ауыстыратын жұмыс шартты теңдеуінің сол жұмыс күштерінің қосындысымен анықтайды, яғни
Мұндағы  - келтiрiлген күш,
- келтiрiлген күш,  - і-ші буынға әсер ететін күштің осы буын қозғалыс центр бағытына әсер ету проекциясы,
- і-ші буынға әсер ететін күштің осы буын қозғалыс центр бағытына әсер ету проекциясы,  - і-ші буынға әсер ететін момент.
- і-ші буынға әсер ететін момент.
Бұл теңдеуден табамыз:
 (2.1)
(2.1)
Келтiрiлген масса және келтiрiлген инерция моментi оны алмастыратын массалардың кинетикалық энергияларының қосындысына кинетикалық энергияның теңдiк шартынан анықтайды. Бұл ережелер аналитикалық теңдеулермен өрнектеледi:
мұндағы mпр және ωпр - келтiрiлген масса және келтiрiлген инерция моментi;  және
және  - сызықты және бұрыштық келтiру үзбелер жылдамдығы; mi және Ji - масса және тетiктiң і- ші буынының инерция моментi;
- сызықты және бұрыштық келтiру үзбелер жылдамдығы; mi және Ji - масса және тетiктiң і- ші буынының инерция моментi;  және
және  - тетiктiң і -ші буынының бұрыштық және сызықтық жылдамдығы.
- тетiктiң і -ші буынының бұрыштық және сызықтық жылдамдығы.
Бұл теңдеулерден табамыз
 (2.2)
(2.2)
 (2.3)
(2.3)
Қаттылықтардың келтiрілуi жүйенің потенциалды энергиясы нақты серпiмдi жүйенiң потенциалдық энергиясына тең болатындай етіп алынады. Қаттылық бiлiкке 1 келтiрілу керек.
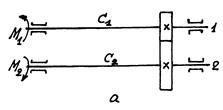
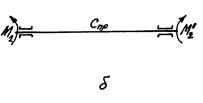
2.1-шi сурет. Бiр бiлiктiң қаттылығына тiстi берiлiстің бар екi бiлiктерiнiң қаттылығына келтiру сұлбасы.
Бiлiкке 1 егер M1 дiң моментi келтірілген, онда M2 = M1. U-нiң бiлiгiне 2 қосымша тiркелген момент келтiрiлген жүйеде M2 = M1 болады.
Бiздiң мысалда: нақты жүйенiң потенциалдық энергиясы
П = М1.φ1 /2+ М2. φ 2 /2= М1(φ 1+ φ 2.U) /2,
Мұндағы φ1 және φ2 - бiлiктердiң бұралуы бұрыштарының
оларға қосымша моменттердiң тiркелген әсерi,
φ 1 = M1/C1; φ 2 = M2/C2; U- тісті бернілістің беріліс саны.
Келтірілген жүйенің потенциалдық энергиясы:
П= М1. φ пр /2,
Мұндағы φпр – келтірілген жүйенің бұрылу бұрышы.
Екі теңдеуді теңестіре отырып,алатынымыз:
φ пр = φ 1 + φ 2.U. (2.4.)
Ережеге сәйкес келтірілген қаттылығы:
Cпр= М1/ φ пр = М1/(φ 1 + φ 2.U).
Осы теңдеуді мына мәнге қойып М1 = φ1.С1 және
φ 2 = φ 1C1U/C2, алатынымыз 1/Cпр = 1/C1 +U2/C2 және Cпр = C1 . C2 / (С1U2 + C2). (2.5)
Негізгі әдебиет [3бет. 319…325]
Қосымша әдебиет [10, c. 34…36]
Бақылау сұрақтары:
1. Есептің динамикалық сұлбасында қанша масса және олардың арасындағы қосу әдiсi қандай болуы керек?
2. Механизм массасының қозғалысы келтірілген машина параметрлерімен сыртқы жүктеме қай қозғалыс түріне жатады?
3. Келтiрiлген күштер, массалар, инерция моментi және қаттылықтарды анықтау үшiн тәуелдiлiктi келтiрiңiз.
3-тақырып. Машиналар және тетiктердiң динамикасының ортақ теңдеулерi
Тетiктер және машиналардың серпiмдi элементтерiндегi динамикалық жүктемелерi массалардың қозғалысының дифференциалды теңдеулерiнен анықтайды, және де теңдеулердiң саны, жүйенiң бостандық дәрежесiнiң санына тең болатын бiрлескен шешiмге тең. Жүйенiң қозғалысының дифференциалды теңдеулерi әр түрлi әдiстермен құрауға болады, яғни Эйлер-Ньютон, Даламбер және т.б. қағидаларымен.
Даламбердiң қағидасына сәйкес, кез келген уақытта инерция күштердiң тепе-теңдiгi, белсендi сыртқы күштері және байланыс реакция күштері орын алады, жүйе қозғалыста болады. Осы жағдайда қажеттi және жеткiлiктi тепе-теңдiк шарттары A-ның кез келген нүктесi туралы күштердiң геометриялық қосындысы және бұл күштердiң моменттерiнiң қосындысының нөлiне тең болып табылады, яғни
 (3.1)
(3.1)
 (3.2)
(3.2)
Мұндағы Pu = mi. ai - инерция күшi; Pi - белсендi күш; Ri – байланыс реакциясы.
Даламбердiң қағидасының кемшiлiгi инерция күшi және жұмыс iстейтiн үдеулердi әрдайым бағыты оны қолдану қажеттілігі үшiн керек болып табылады. Еркiн емес жүйелер үшiн динамиканың есептерiнiң шешiмдерi жалпылама және қарапайым әдiске негізделген. Лагранж әдiсi арқылы қозғалыстың дифференциалдық теңдеулерiн алу үшiн таңдаулы қорытылған координаталардың функциясындағы жүйенiң кинетикалық және потенциалдық энергиясы үшiн өрнек құру керек. X-тың қорытылған координатасы үшiн Лагранждың теңдеуi төмендегідей болады
 (3.3)
(3.3)
Мұндағы  жалпылама жылдамдық; К және П - сәйкесiнше зерттелетiн жүйенiң кинетикалық және потенциалдық энергиясы; Px - қозғаушы жалпылама күш.
жалпылама жылдамдық; К және П - сәйкесiнше зерттелетiн жүйенiң кинетикалық және потенциалдық энергиясы; Px - қозғаушы жалпылама күш.
Айналмалы және iлгерлемелi қозғалатын массалардың кинетикалық энергиясы

Мұндағы  және
және  инерция моментi, кез келген айналмалы элементтiң бұрылу бұрышы және бұрыштық жылдамдығы; m, S және
инерция моментi, кез келген айналмалы элементтiң бұрылу бұрышы және бұрыштық жылдамдығы; m, S және  сәйкесiнше қаралатын жүйенiң кез келген iлгерлемелi қозғалатын элементiнiң масса, жол және сызықты жылдамдығы.
сәйкесiнше қаралатын жүйенiң кез келген iлгерлемелi қозғалатын элементiнiң масса, жол және сызықты жылдамдығы.
Жүйенiң потенциалдық энергиясы
Мұндағы C және K – х жүйесінің (бұрауда) бұрыштық және сызықтық қаттылық элементі; φ және S – бұрыштық бұралуы және x-тың элементiнiң орын ауыстыруы.
X қорытылған координаталар ұғыммен Px-тың қорытылған күшiнiң ұғымы байланысты. iшкi де бұл күштер dAның қарапайым жұмысының бөлуiнен бөлiндiге, шығарылған барлық күштерге (iшкi күштер, сол сияқты сыртқы күштерде)яғни күш жүйелеріне тең
Px = dA/dx.
Таралған массалары жүйесiнiң қозғалыстары теңдеулерiнiң құрастыруымен алмастырады.
Негiзгi әдебиет [3бет 326... 330]
Қосымша әдебиет [10бет 47... 50]
Бақылау сұрақтары:
1. Даламбер қағидасының принципі қандай? Оның кемшiлiгiн атаңыз.
2.Лагранждың теңдеуiн жазыңыз.
3.Қандай параметрлер жүйенiң кинетикалық және потенциалдық энергияларына тәуелдi болады?
4-тақырып. Механизм жұмыстарының ауыспалы режимінде крандармен жүктерді түсіру және көтеру динамикасы
Динамикалық жүктемелер жүктi көтеру немесе түсiру процессінде пайда болады, яғни жүктi көтеру кезінде жүк салмағынан немесе жүкті қармап алуға тәуелдi болады. Бiрiншi жағдайда жүктеулер салмағы көтергiш арқан полиспастағы статикалық жүктеме салмағына Qст тең деп есептейдi. Екiншi жағдайда жүк тiрек негiзінің үстінде және арқан полиспаст жүктелмеген деп есептейдi. Динамикалық жүктеме көрету полиспастасымен жүк қармауға жүкті көрету жылдамдығы U болғанда жүк салмағын қосу кезінде пайда болады. Динамикалық жүктеме мынаған тең болады:
Мұндағы k - тiрек конструкцияцының қаттылығы.
4.1. Салмақтан жүктi көтеру (4.1-шi сурет)
Бұл жағдайда кран конструкцияцының жүйесін арқан қаттылығын Kп және К к кран конструкциясының қаттылығын келтірілген қаттылықпен К к алмастыра отырып екі массалыққа келтіруге болады.
К = Кп.Кк/(Кп + Кк).
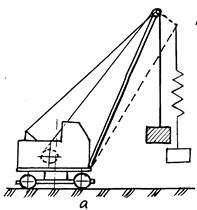
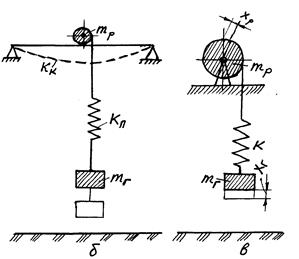
4.1-шi сурет. Салмақпен жүктi көтеруде динамикалық жүктеудiң сұлбалары: а-жебелі кран;б- көпірлі кран типтес; в-есептеу сұлбасы.
Сонда ықшамдалған жүйені екi массадан тұратынын көрсетуге болады: mр - қозғалтқыш роторының массалары және көтеруге келтірілген механизм массасы; mr – жүк массасы,келтiрiлген қаттылығы бар элемент пен өзара серпiмдi элемент арсындағы байланыс.
Кран жүйесінiң қозғалысының теңдеулерiнiң құрастырулары үшiн әмбебап Лагранждың қағидасын қолданамыз. Xp мен массасы mp және Xr мен массасы mr қоса есептегенде кинетикалық және потенциалдық энергия мынаған тең болады:
 П=K(xp-xг)2/2.
П=K(xp-xг)2/2.
Осы теңдеулер жүйесiн Лагранждың теңдеуiне қойып мына теңдеуді аламыз:

 (4.1)
(4.1)
Мұндағы Тизб – қозғалтқыштың артық жүктемесі.
(4.1) осы теңдеу жүйесін оңай түрге келтіріп, теңдеуді түрде аламыз:
 (4.2)
(4.2)
Мұндағы x=xp – xr; m=1/mp+1/mr; p - серпiмдi буынның айналмалы тербелiс жиiлiгi.
Теңдеудің толық шешімі (4.2)
X = Qст + 2Tизб(1- cos pt) / (kmmp).
cospt= -1 болғанда серпiмдi буындағы максимал күш мынадай болады:
Pmax = k.x = Qст+ 2Tизб.mr/(mr+ mp).
4.2. 4.2-шi сурет. Қармап жүктi көтеру
Бұл жағдайда кран конструкциясының қаттылығын ғана ескереді Кк, яғни кран массасын mk және жүк массасын mг тек бір масса ретінде қарастырады. (4.2-шi сурет, b).
4.2-шi сурет. Жүктi қармап көтеруде динамикалық жүктеудiң сұлбасы: а - жебелі кран; б - көпірлік кран типтес; в - бiр массалы жүйенiң есептік схемасы; г - екi массалы жүйенің есептік схемасы.
Лагранждың қағидасын қолдана отырып, қозғалыстың теңдеуiн аламыз
 (4.3)
(4.3)
Шешімі – 
Мұндағы:  статикалық жүктемеден конструкцияның иiлiмi;
статикалық жүктемеден конструкцияның иiлiмi;  жүкті көтеру жылдамдығы;
жүкті көтеру жылдамдығы;  еркiн тербелiстердi айналу жиiлiгі.
еркiн тербелiстердi айналу жиiлiгі.
sin pt= -1 болғанда максимал динамикалық күшi

Негiзгi әдебиет[1бет. 237…245]
Қосымша әдебиет [10бет. 147…151]
Бақылау сұрақтары:
1. Кран ықшамдалған динамикалық жүйенi салмақтан жүктi көтеруде қалай ұсынады?
2. Жүкті салмақпен көтерген кездегі серпiмдi буындағы максимал күшi үшiн өрнегін жазыңыз.
3. Максимал динамикалық күштерiн қандай тәуелділік бойынша анықтайды?
5-тақырып. Иілмелі аспасы бар жүкті арбашықты және кран қозғалыс механизмінің динамикасы
Жүк көтеру машинасы жұмысы кезінде жүк арқанға ілінеді сондықтан оның шайқалуы бақыланып отырады. Сондықтан жүк көтеру машиналарының нақты есептері кезінде жүк тербелісінің осы эффектісін бағалай білу керек. Жүктің маятникті тербелу жиілігі кранмен салыстырғанда кран металл конструкциясымен қозғалыс механизм трансмиссиясының серпімді жиілігінен анағұрлым төмен. Жүктің маятникті тербелуі кранның серпімді тербелуіне тәуелсіз және оны бөлек есептеуге болады. Аспалы жүктің иіліміне баға беру үшін қозғалыс механизм динамикасын екі массалы жүйенің есептік сұлбасы ретінде қабылдаймыз.
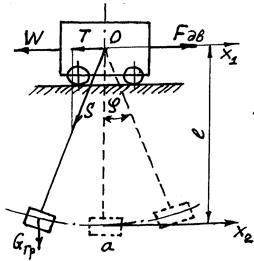
5.1-шi сурет. Жүк аспасының иiлгiштiгiнiң есепке алумен орын ауыстыру тетiктерiнiң есептiк сұлбалары: a - негiзгiсi; b – келтiрiлген
5.1-шi суретте белгiленген: m2 - жүктiң массасы; m1 - арба немесе кранның және iлгерлемелi орын ауыстырудың массалары, x1- m1 массасының көлденең орын ауыстыруы; x2 - жүктiң абсолюттi көлденең орын ауыстыру; φ- жүк салпыншағының ауытқуының бұрышы;l - жүктi аспа ұзындығы; W - кран немесе арбаның орын ауыстыруына кедергi күшi;  - арбаның немесе кранның жұмыс iстейтiн қозғаушы күші.
- арбаның немесе кранның жұмыс iстейтiн қозғаушы күші.
Жүктiң аз тербелiстерiнiң  қарастыруымен шектелеміз,жүктi аспалыны өзгерiссiз ұзындықта қарастырамыз. Бұл жорамалдың
қарастыруымен шектелеміз,жүктi аспалыны өзгерiссiз ұзындықта қарастырамыз. Бұл жорамалдың  есепке алуымен, жүктi салпыншақтағы күш және салпыншақтағы керiлiстiң көлденең проекциясы
есепке алуымен, жүктi салпыншақтағы күш және салпыншақтағы керiлiстiң көлденең проекциясы

Арбаның қозғалысының теңдеуi
 (5.1)
(5.1)
Көлденең бағыттағы жүктi қозғалыстың басқаруы сияқты болады
 (5.2)
(5.2)
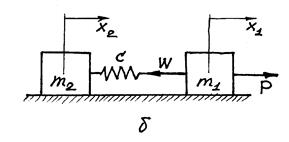
5.1-шi сурет схема бойынша келтiрiлген динамикалық жүйенi қарап шығар едiк, мыз m2 массасы тiрек бет бойынша үйкелiссiз сырғанатамыз. Бұл жүйенiң қозғалысы мына теңдеулермен суреттеледi
 (5.3)
(5.3)
(5.3) теңдеу жүйесін(5.1)және (5.2) теңдеу жүйелерімен салыстырсақ, олар ұқсас екенін көоеміз. Серiппенiң арқасында қаттылықпен жүктi массаның арбасына бекiтуге (немесе кран) арбаға ауытқығыш жүктi динамикалық әсер сол сияқты бұдан шығады. Бұл ұқсастықтар теңселетiн жүктi бағалауға көрнекi мүмкiндiк бередi:
Жүгi ауытқып кеткен күйiнде қозғаушы күш көмектеседi, ол жанында арбаның орын ауыстыруына кедергi күшiн үлкейтедi.
Негiзгi әдебиет [3, бет. 349...351]
Қосымша әдебиет [10, бет. 164…167]
Бақылау сұрақтары:
1. Жүк көтеру машиналардың есептеулерін анықтап алған күйiнде жүктi теңселтудi есепке алуды қажеттiлiктiң себебiн атаңыз.
2. Жүктiң маятниктi тербелiстерi кранмен салыстырғанда серпiмдi тербелiстерiмен (бiрге әлде бөлек) қалай есептеуге болады?
3. Теңселетiн жүктi ықпал көрнекi бағалауға мүмкiндiк беретiн арбаға(немесе кран) ауытқығыш жүктi динамикалық әсердiң ұқсастығын келтiрiңiз.
6-тақырып. Бұрылатын кранның бiр бөлiгiнiң айналуын тетiктiң динамикасы таратып жiберу және тоқтатуда
Бұрылатын кранның бiр бөлiгiнiң айналуы орнатпайтын күйiнде бiрге жебе тәрiздi жұмыс жабдығы және жүктi инерциямен инерция кедергiлерi, оның бұрылатын бөлiгiнiң мерзiмдi инерциялары пайда болады. Бұл кедергiлерді мына теңдеу бойынша анықтауға болады:
 , (6.1)
, (6.1)
Мұндағы: m г – жүктiң массасы; lО - бұрылатын бөлiктiң айналу өстерiне жүктiң ортасынан қашықтығы; JО - бұрылатын кранның бiр бөлiгiнiң айналу өстерiнің инерция моментi;; ω0 және ωg - кранның бұрылатын бөлігі мен қозғалтқыш роторының бұрыштық жылдамдығы; u - механизмнің беріліс саны; tР – механизмнің айналу уақыты.
6.1-сурет.Жебелік кранның схемасы.
 ,
,
Мұндағы:mс және mп - жебе және теңестiрушi салмақтың массалары; ρu и xПр жұмыстың тарту күшінің массасының айналу осіне қатынасы.
Қозғаушының бiлiгiнде iске қосқыш моментi M П айналулар тетiктiң таратып жiберуiнде M с моментi, жиiрек ерiксiз келтiру айналмалы кедергi келтiру моменттерiнiң инерциясынан  шығады:
шығады:
 (6.2)
(6.2)
Айналу тетігінің ұзындығын берiлiс санына және КПД айналу механизміне көбейтіп MП, мынаны аламыз:  . (6.2) өрнектер есепке алумен кранның бiр бөлiгi таратып жiберу бұрылатын жұмыс iстейтiн динамикалық моменттi аламыз:
. (6.2) өрнектер есепке алумен кранның бiр бөлiгi таратып жiберу бұрылатын жұмыс iстейтiн динамикалық моменттi аламыз:
 , (6.3)
, (6.3)
Мұндағы: ωО - бұрылатын машинаның бiр бөлiгiнiң бұрыштық жылдамдығы.
Бұрылатын бөлігіне әсер ететін максималды динамикалық момент:
 (6.4)
(6.4)
Кранның бұрылатын бөлігінің тежеу кезіндегі тежелу моменті
 ,
,
Мұндағы:  және
және  - беріліс саны,КПД және айналу механизмінің тежеу уақыты.
- беріліс саны,КПД және айналу механизмінің тежеу уақыты.
Тежеу кезіндегі машинаның бұрылу бөлігінің максимал динамикалық моментi,
 (6.6)
(6.6)
Негiзгi әдебиет [3бет, 294...299]
Қосымша әдебиет[ 3бет,190...192 ]
Бақылау сұрақтары:
1. Қозғаушының бiлiгiнде iске қосқыш моментi айналуы тетiктiң таратып жiберуiнде жеңiп шығатын жүктемені атаңыз
2. Кранның бұрылу кезіне әсер ететін динамикалық моментінің өрнегін жазыңыз.
3. Қандай тәуелдiлiк бойынша кранның максималды динамикалық моменті анықталады?
7-тақырып.Өтпелі жұмыс режиміндегі таспалы конвейнрлердің динамикасы.
Таспалы конвейерлердің динамикасы тасымалданатын жүктердің сипатына, үлкен бөлшектердің әсерінен таспаның иілу формасына, таспаға және роликті тіректерге жүктеме кезінде бөлшектердің соғылуына және басқа да пайдалану факторларына тәуелді болады. Конвейерде динамикалық үрдістер белгіленген және белгіленбеген қозғалыс режимдерінде пайда болады.
Конвейер жетегінде іске қосу периодында статикалықтан басқа, қозғалтқышты есепке алғанда инерционды жүктемелер пайда болады. Таспаның серпімді ұзаруынан конвейердің барлық массасы қозғалтқышты іске қосқанда біркелкі қозғалмайды.
Атанақтағы максимал тартым күші
 , (7.1)
, (7.1)
Мұндағы  - іске қосу кезіндегі статикалық тартым күші Wс.п>Wₒ, Wп- іске қосу кезінде таспаның ролик тірегінде қозғалуының кедергі коэффициенті. Бнлгіленген режимдегі Wп = Кп•W; Кп =1,5 – іске қосу кезінде статикалық үйкеліс кедергісінің кратности коэффициенті; Wₒ – белгіленген режимдегі таспадағы тартқыш күші.
- іске қосу кезіндегі статикалық тартым күші Wс.п>Wₒ, Wп- іске қосу кезінде таспаның ролик тірегінде қозғалуының кедергі коэффициенті. Бнлгіленген режимдегі Wп = Кп•W; Кп =1,5 – іске қосу кезінде статикалық үйкеліс кедергісінің кратности коэффициенті; Wₒ – белгіленген режимдегі таспадағы тартқыш күші.
Жетекті іске қосқандағы динамикалық момент:
M д = Jпр•ω/  , (7.2)
, (7.2)
Мұнда ω – қозғалтқыш білігінің бұрыштық жылдамдығы; - жетекті іске қосу уақыты; Jпр – қозғалтқыш білігіне келтірілген конвейерлердің қозғалу массаларының инерция моменті:
 .
.
Мұнда  - қозғалтқыш білігінде орналасқан массаларының инерция моменті; R –атанақ радиусы;
- қозғалтқыш білігінде орналасқан массаларының инерция моменті; R –атанақ радиусы;  - конвейерт және жүктердің қозғалатын бөліктерінің келтірілген массасы:
- конвейерт және жүктердің қозғалатын бөліктерінің келтірілген массасы: 

 және
және  - жүктің және таспаның погонды массасы; L- конвейер ұзындығы;
- жүктің және таспаның погонды массасы; L- конвейер ұзындығы;  - қозғалатын масса бөліктерінің айналу жылдамдығының таспа жылдамдығынан аз екендігін ескеретін коэффициент; - конвейердің айналу тетіктерінің массасы;
- қозғалатын масса бөліктерінің айналу жылдамдығының таспа жылдамдығынан аз екендігін ескеретін коэффициент; - конвейердің айналу тетіктерінің массасы;  - көп покладкалы таспа серпімділігін ескеретін коэффициент (резеңке арқанды таспа үшін
- көп покладкалы таспа серпімділігін ескеретін коэффициент (резеңке арқанды таспа үшін  ).
).
Конвейерді іске қосу ұзақтылығы:
 ,
,
Мұнда:  - қозғалтқыштың орташа іске қосу моменті;
- қозғалтқыштың орташа іске қосу моменті;








