2015-04-30
2015-04-30 3090
3090Общие сведения. В приводах подачи современных станков с ЧПУ применяют регулируемые электродвигатели постоянного или переменного тока с цилиндрическим и дисковым ротором, с возбуждением от постоянных магнитов и с электромагнитным возбуждением.
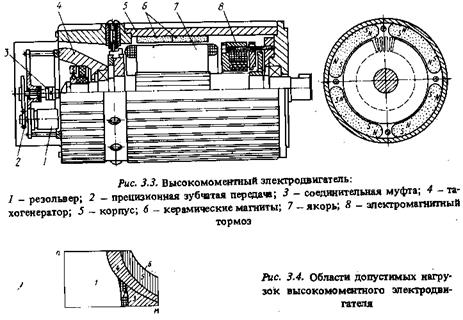
Высокомоментный электродвигатель постоянного тока - это устройство, в которое входят тахогенератор, электромагнитный тормоз, измерительный преобразователь перемещений (рис, 33), Возбуждение двигателей большинства типов осуществляется от постоянных магнитов, изготовленных из материалов с высокой удельной энергией: оксидно-бариевой керамики, редкоземельных магнитных материалов. Двигатели с редкоземельными магнитами выполняются по обращенной схеме: постоянные магниты находятся на роторе, а обмотка якоря на статоре. Типичное расположение областей работы высокомоментного двигателя представлено на рис. 3.4. На область 1 приходится длительная работа двигателя с естественным охлаждением. При использовании независимого принудительного охлаждения двигателя к области длительной работы добавляется область 2, В области 3 двигатель может работать в повторно-кратковременном режиме, при этом обеспечивается номинальная долговечность щеток, и с увеличением допустимого крутящего момента допустимая частота вращения ротора уменьшается. При снижении долговечности щеток кратковременная работа двигателя возможна в области 4, Когда приведенный к валу двигателя момент инерции механической части привода составляет не более половины момента инерции ротора двигателя, для кратковременной работы при разгоне и торможении исполнительного органа станка может быть использована область 5.

где ω (р) — изображение угловой скорости вала двигателя; v(p) — изображение напряжения питания; кД = 1 с -1; ТЭ — электромагнитная постоянная якорной цепи, с; ТМ — электромеханическая постоянная времени, с. Передаточная функция двигателя при возмущении по нагрузке

где.ω(p) — изображение статического перепада скорости ротора, вызванного падением напряжения от тока статической нагрузки на активном сопротивлении якорной кепи; Мс(р) — изображение момента статического сопротивления на валу двигателя; r — полное активное сопротивление якорной цепи, Ом.
Быстродействие двигателя оценивается по среднему угловому ускорению (рад/с2)
где ωном- номинальная угловая скорость двигателя, рад/с, t. 0.63-время, за которое двигатель, нагруженный моментом инерции механизма, разгоняется до скорости, равной.0,63ωном,
В приводах подач станков наиболее удобно использовать высокомоментные двигатели постоянного тока с возбуждением от постоянных магнитов. Благодаря низкой номинальной частоте вращения (500,„1000 об/мин), возможности длительно работать при малой скорости (до 0,1 об/мин) с большим вращающим моментом такой двигатель может быть непосредственно связан с ходовым винтом привода подачи. Названные двигатели допускают 6—10-кратную перегрузку по вращающему моменту при малых частотах вращения в течение 20...30 мин, а также 1,5— 3-кратную при номинальной и максимальной частоте вращения. По сравнению с асинхронными частотно регулируемыми высокомоментные двигатели имеют большие габариты, меньший КПД, худшую перегрузочную способность.
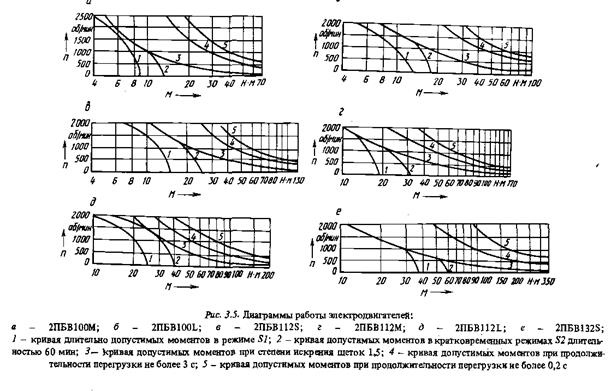
Двигателя постоянного тока серии 2ПБВ. Это двигатели с возбуждением от постоянных магнитов, со встроенным измерительным преобразователем скорости вращения, в качестве которого использован тахогенератор. Могут быть снабжены измерительным преобразователем угла поворота (резольвером или фотоэлектрическим BE-178) и тормозом. Двигатели применяются в основном в приводах подач станков с ЧПУ и гибких модулей. Технические их характеристики приведены в табл. 3.5, где М— номинальный момент двигателя; Мmax — максимальный момент; nmax. — максимальная частота вращения ротора двигателя; I — длительный ток при заторможенном роторе: Е —
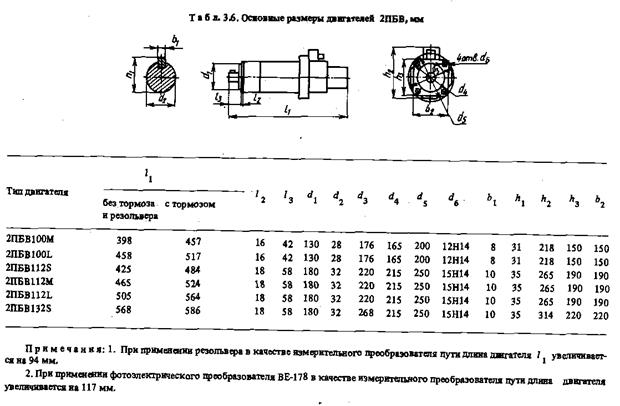
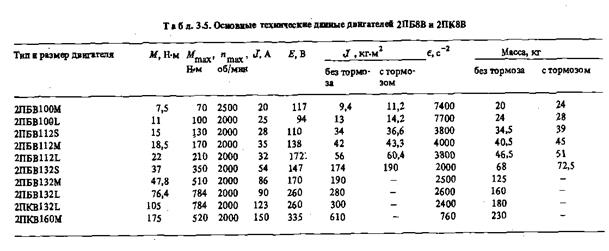












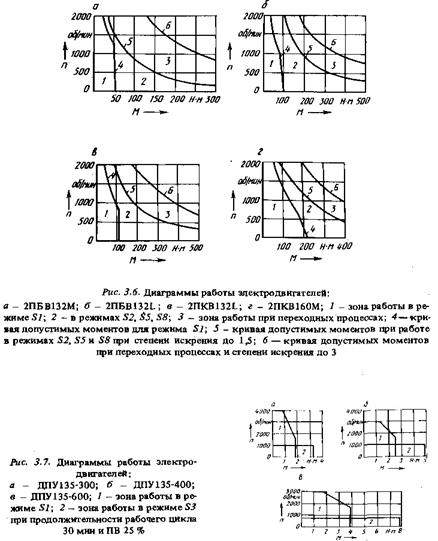
 напряжение тока при максимальной частоте вращения ротора; J — момент инерции вращающихся частей двигателя; е — расчетное ускорение. Основные размеры двигателей приведены в табл. 3.6. Диаграммы работы представлены на рис, 3.5 и 3.6. Номинальный режим работы - S1. Допускается работа в кратковременном S2, повторно-кратковременном S5 и перемежающемся S8 режимах.
напряжение тока при максимальной частоте вращения ротора; J — момент инерции вращающихся частей двигателя; е — расчетное ускорение. Основные размеры двигателей приведены в табл. 3.6. Диаграммы работы представлены на рис, 3.5 и 3.6. Номинальный режим работы - S1. Допускается работа в кратковременном S2, повторно-кратковременном S5 и перемежающемся S8 режимах.
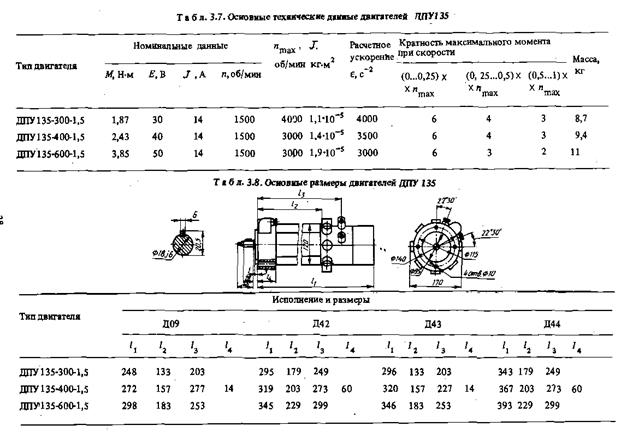
Двигатели постоянного тока серии ДПУ135. Это двигатели с возбуждением от постоянных магнитов. Могут быть оснащены тахогенератором, измерительным преобразователем положения, безлюфтовым электромагнитным тормозом. Двигатели предназначены для быстроходных механизмов промышленных роботов и станков с ЧПУ. Входят в состав комплектных электроприводов ЭПУ1 и ЭШИМ1. Технические характеристики двигателей ДПУ 135 приведены в табл. 3.7, размеры - в табл. 33, диаграммы работы - на рис, 3,7. Обозначения двигателей расшифровываются так: ДПУ — двигатель коллекторный постоянного тока управляемый; 135 — диаметр его корпуса в миллиметрах; 300,400,500 - мощность в ваттах; 1,5 - номинальная частота вращения в тысячах оборотов в минуту; Д09 - двигатель с тахогенератором; Д42 -двигатель с тахогенератором и тормозом; Д43 - двигатель с тахогенератором и измерительным преобразователем положения; Д44 - двигатель с тахогенератором, тормозом и измерительным преобразователем положения.
При максимальной частоте вращения в интервале времени до 1 мин двигатели могут развивать момент, равный 0,5М. В переходном режиме в течение 0,2 с допускается кратность максимального момента по отношению к номинальному, указанная в табл. 3,8, Двигатели могут работать в режимах: S1, S2 при частоте вращения до 100 об/мин; S3 при частоте вращения до 1000 об/мин, времени рабочего цикла до 30 мин и продолжительности включения ПВ 25 % (см. рис, 35),
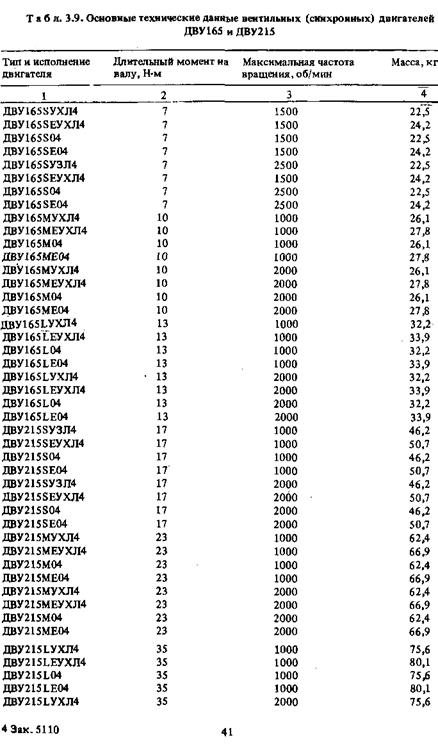
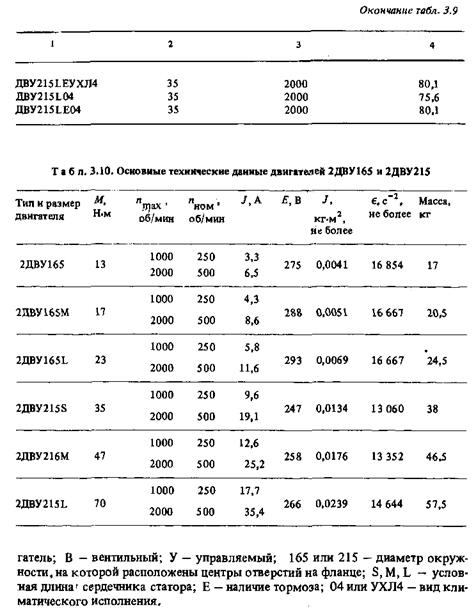
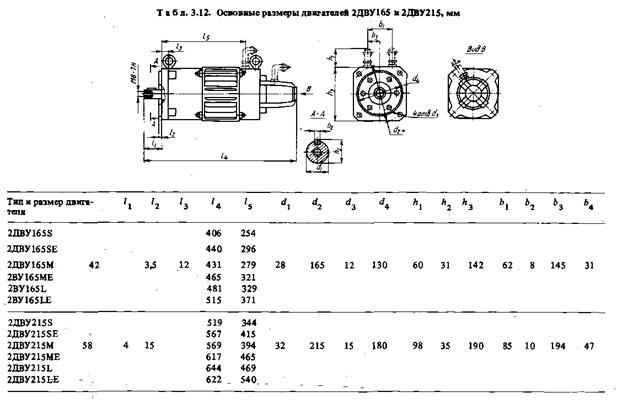
Вентильные (синхронные) электродвигатели 2ДВУ165 и 2ДВУ215. Эти электродвигатели предназначены для электроприводов станков и промышленных роботов с микропроцессорным управлением. Роль индуктора выполняет ротор, оснащенный постоянными магнитами, роль якоря — статор. При взаимодействии магнитного поля ротора с током, протекающим по обмотке статора, ротор приводится во вращение. По сигналам обратной связи, вырабатываемым преобразователем, закрепленным на роторе, электронный коммутатор подключает фазы обмотки статора к источнику питания так, что ротор развивает постоянный момент, В обмотку статора встроены терморезисторы, контролирующие ее температуру. Двигатели могут быть оснащены тормозом и фотоэлектрическим измерительным преобразователем перемещений.
Основные технические данные двигателей приведены в табл. 3.9, 3.10, где М — длительный момент на валу двигателя; nmax - максимальная частота
вращения вала; nном - номинальная частота вращения вала: пиом = 0,25nтах;
/ - ток при моменте М на валу двигателя и номинальной частоте вращения; Е- - линейная электродвижущая сила при максимальной частоте вращения; / — момент инерции вращающихся частей; е — среднее расчетное угловое ускорение вала двигателя: ε = 5M/J,
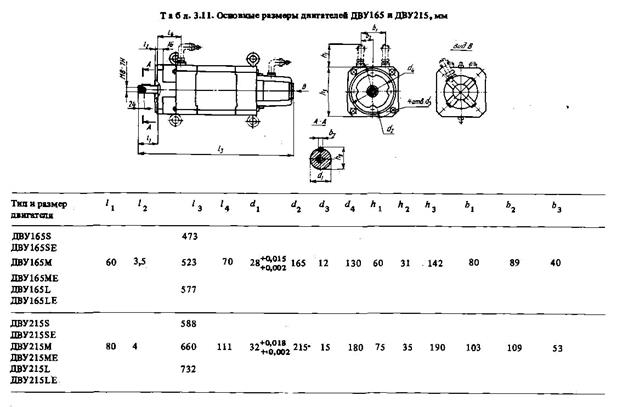
Основные размеры электродвигателей приведены в табл. 3.11,3,12, В условном обозначении двигателя 2 означает порядковый номер серии; Д — дви-