2015-05-14
2015-05-14 322
322Т.С. Китаева
«Определение ускорения свободного падения
При помощи физического маятника»
Методические указания к выполнению лабораторной работы № 14
по курсу механики, молекулярной физики и термодинамики.
Калуга 2006 г.
Цель работы: определение ускорения свободного падения при помощи физического маятника.
Теоретическая часть.
Колебаниями называются процессы, характеризующиеся той или иной степенью повторяемости во времени.
Системы, совершающие колебания, называются колебательными: математический маятник, крутильный маятник, физический маятник и др.
В зависимости от характера воздействия на колеблющуюся систему различают свободные и вынужденные колебания.
Свободными (или собственными) называются такие колебания, которые происходят в системе, предоставленной самой себе после того, как она была выведена из состояния равновесия.
Колебания называются периодическими, если значения характеризующих их физических величин повторяются через одинаковые промежутки времени.
Простейшими свободными периодическими колебаниями являются гармонические - то есть колебания, при которых физические величины, их характеризующие, изменяются по закону синуса или косинуса.
Пусть колебательная система совершает гармонические колебания. Согласно основному уравнению динамики поступательного движения имеем:
 , (1)
, (1)
где  - масса колебательной системы;
- масса колебательной системы;
 - ускорение колебательной системы вдоль оси
- ускорение колебательной системы вдоль оси  ,
,  .
.
 , (2)
, (2)
где  - смещение колебательной системы относительно положения равновесия;
- смещение колебательной системы относительно положения равновесия;
 - амплитуда колебаний, равная максимальному абсолютному значению смещения;
- амплитуда колебаний, равная максимальному абсолютному значению смещения;
 - фаза колебаний - аргумент тригонометрической функции в формуле (2);
- фаза колебаний - аргумент тригонометрической функции в формуле (2);
 - начальная фаза колебаний - значение фазы колебаний в начальный момент времени
- начальная фаза колебаний - значение фазы колебаний в начальный момент времени  ;
;
 - круговая (циклическая) собственная частота колебаний;
- круговая (циклическая) собственная частота колебаний;
 - период колебаний - наименьший интервал времени, по истечении которого значения физических величин, характеризующих колебания, повторяются.
- период колебаний - наименьший интервал времени, по истечении которого значения физических величин, характеризующих колебания, повторяются.
То есть
 или
или  ,
,
при этом фаза колебаний будет отличаться на  :
:
 ,
,
откуда
 (3)
(3)
Продифференцируем выражение (2) дважды, найдём ускорение и подставим его в (1):
 , (4)
, (4)
где  .
.
Видим, что сила  , действующая на колебательную систему, совершающую гармонические колебания, удовлетворяет следующим условиям:
, действующая на колебательную систему, совершающую гармонические колебания, удовлетворяет следующим условиям:
1. сила пропорциональна смещению х;
2. сила направлена к положению равновесия (возвращающая сила).
Роль такой силы может играть как упругая, так и квазиупругая сила.
Используя понятие квазиупругой силы, исходя из основного уравнения динамики поступательного движения для колебательной системы, имеем:
 ,
,
где  ;
;
 ,
,
где ;
 (5)
(5)
Выражение (5) есть дифференциальное уравнение гармонических колебаний, решением которого является выражение вида .
В качестве колебательной системы рассмотрим физический маятник - абсолютно твёрдое тело, совершающее колебания в вертикальной плоскости под действием силы тяжести вокруг неподвижной горизонтальной оси « », не проходящей через центр масс «
», не проходящей через центр масс « » (Рис. 1.).
» (Рис. 1.).
Если физический маятник массой «» отклонить на небольшой угол  от положения равновесия, то момент силы тяжести относительно т. «
от положения равновесия, то момент силы тяжести относительно т. « » можно представить:
» можно представить:
 ,
,
где  - расстояние от т. «», лежащей на оси вращения, до центра масс «»; причём здесь учтено, что для малых углов
- расстояние от т. «», лежащей на оси вращения, до центра масс «»; причём здесь учтено, что для малых углов  .
.
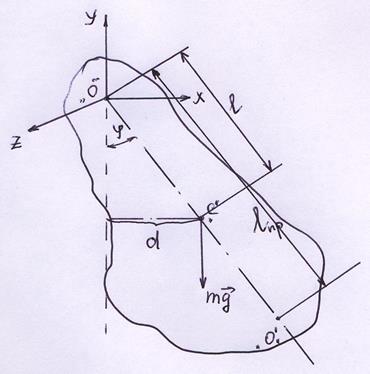
Рис. 1. Физический маятник.
Запишем основное уравнение динамики вращательного движения относительно неподвижной оси «»:
 , (6)
, (6)
где  - момент инерции физического маятника относительно оси «»;
- момент инерции физического маятника относительно оси «»;
 - угловое ускорение относительно той же оси «».
- угловое ускорение относительно той же оси «».
Тогда уравнение (6) можно представить:
 или
или  .
.
Введём обозначение  ,
,
тогда
 (7)
(7)
Уравнение (7) является дифференциальным уравнением свободных колебаний физического маятника, решением которого является уравнение гармонических колебаний с собственной круговой частотой :
 (8)
(8)
Период малых колебаний физического маятника равен:
 (9)
(9)
Введём понятие приведённой длины физического маятника.
С этой целью рассмотрим другую колебательную систему - математический маятник — материальная точка массой «», подвешенная на невесомой нерастяжимой нити и колеблющаяся под действием силы тяжести в вертикальной плоскости.
Хорошим приближением математического маятника является небольшой тяжёлый шарик, подвешенный на тонкой длинной нити ( ).
).
Поскольку математический маятник можно представить как предельный случай физического маятника, учитывая, что его момент инерции относительно горизонтальной неподвижной оси, проходящей через точку подвеса, равен:  , получим следующее выражение для периода колебаний математического маятника:
, получим следующее выражение для периода колебаний математического маятника:
 (10)
(10)
Сравнивая выражения (9) и (10), видим, что периоды малых колебаний физического и математического маятников будут равны в том случае, если длина математического маятника равна  . Эта величина называется приведённой длиной физического маятника и обозначается
. Эта величина называется приведённой длиной физического маятника и обозначается  , то есть:
, то есть:
 (11)
(11)
Следовательно, приведённая длина физического маятника - это длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника. Исходя из определения (11), период колебаний физического маятника можно записать:
 (12)
(12)
Точка « », лежащая на продолжении прямой
», лежащая на продолжении прямой  (Рис. 1.), отстоящая от точки подвеса на расстояние , называется центром качания физического маятника. Центр качания примечателен тем, что период физического маятника не изменяется, если точкой подвеса сделать точку «». Применяя теорему Штейнера, получим:
(Рис. 1.), отстоящая от точки подвеса на расстояние , называется центром качания физического маятника. Центр качания примечателен тем, что период физического маятника не изменяется, если точкой подвеса сделать точку «». Применяя теорему Штейнера, получим:
то есть  .
.
Измеряя значения периода , для физического маятника, из формулы (12) можно выразить ускорение свободного падения  .
.