 2015-05-10
2015-05-10 577
577Одним из методов, которые позволяют свести задачу нелинейного программирования к решению системы уравнений, является метод неопределенных множителей Лагранжа.
Если целевая функция  является линейной, а ограниченным пространством является политоп, то задача является задачей линейного программирования, которая может быть решена с помощью хорошо известных решений линейного программирования.
является линейной, а ограниченным пространством является политоп, то задача является задачей линейного программирования, которая может быть решена с помощью хорошо известных решений линейного программирования.
Если целевая функция является вогнутой (задача максимизации) или выпуклой (задача минимизации) и множеством ограничений служит выпуклая, то задачу называют выпуклой, и в большинстве случаев могут быть использованы общие методы выпуклой оптимизации.
Если целевая функция является отношением вогнутых и выпуклых функций (при максимизации) и ограничения выпуклые, то задача может быть преобразована в задачу выпуклой оптимизации использованием техник дробного программирования.
Существуют несколько методов для решения невыпуклых задач. Один подход заключается в использовании специальных формулировок задач линейного программирования. Другой метод предусматривает использование методов ветвей и границ, где задача делится на подклассы, чтобы быть решенной с выпуклыми (задача минимизации) или линейными аппроксимациями, которые образуют нижнюю границу общей стоимости в пределах раздела. При следующих разделах в определенный момент будет получено фактическое решение, стоимость которого равна лучшей нижней границе, полученной для любого из приближенных решений. Это решение является оптимальным, хотя, возможно, не единственным. Алгоритм можно прекратить на ранней стадии, с уверенностью, что оптимальное решение находится в рамках допустимого отклонения от найденной лучшей точки; такие точки называются ε-оптимальными. Завершение ε-оптимальных точек, как правило, необходимое для обеспечения конечности завершения. Это особенно полезно для больших, сложных задач и задач с неопределенными расходами или значениями, где неопределенность может быть определена из соответствующей оценки надежности.
Дифференцирование и условия регулярности, условия Каруша — Куна — Такера (ККТ) обеспечивают необходимые условия оптимальности решения. При выпуклости, эти условия являются и достаточными.
Целочисленное программирование — раздел математического программирования, в котором на все или некоторые переменные дополнительно накладывается ограничение целочисленности.
Простейший метод решения задачи целочисленного программирования — сведение её к задаче линейного программирования с проверкой результата на целочисленность.
Динамическое программирование в теории управления и теории вычислительных систем — способ решения сложных задач путём разбиения их на более простые подзадачи. Он применим к задачам с оптимальной подструктурой, выглядящим как набор перекрывающихся подзадач, сложность которых чуть меньше исходной. В этом случае время вычислений, по сравнению с «наивными» методами, можно значительно сократить.
Метод динамического программирования сверху — это простое запоминание результатов решения тех подзадач, которые могут повторно встретиться в дальнейшем. Динамическое программирование снизу включает в себя переформулирование сложной задачи в виде рекурсивной последовательности более простых подзадач.
Идея динамического программирования
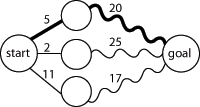
Нахождение кратчайшего пути в графе из одной вершины в другую, используя оптимальную подструктуру; прямая линия обозначает простое ребро; волнистая линия обозначает кратчайший путь между вершинами, которые она соединяет (промежуточные вершины пути не показаны); жирной линией обозначен итоговый кратчайший путь.
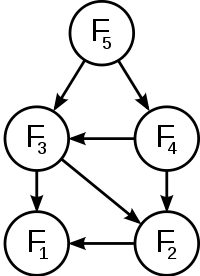

Граф подзадач (ребро означает, что одна задача зависит от решения другой) для чисел Фибоначчи (граф — ациклический).








