 2015-05-10
2015-05-10 198
198Лабораторная работа № 5
ИССЛЕДОВАНИЕ ЗАМКНУТЫХ СИСТЕМ
Задание на лабораторную работу
Исследовать замкнутую системы и параметры переходного процесса во временной области.
Отчет по лабораторной работе должен содержать:
– краткие теоретические сведения;
– выводы.
Последовательность выполнения работы
Для выполнения работы используется GUI-интерфейс «SISO-Design Tool» из пакета прикладных программ Control System Toolbox.
Графический интерфейс предназначен для анализа и синтеза одномерных линейных (линеаризованных) систем автоматического управления (SISO - Single Input/Single Output).
В Control System Toolbox имеется тип данных, определяющих динамическую систему в виде набора полюсов, нулей и коэффициента усиления передаточной функции. Синтаксис команды, создающий LTI (Linear Time Invariant)-систему в виде объекта ZPK (zero-pole-gain) c одним входом и одним выходом
ZPK([], [], K) 001...,, mss **1...,, nss
001...,, mss – значения нулей системы,
– значения полюсов системы,
**1...,, nss
K – коэффициент усиления.
Пример:
>> w=tf([10],[2 2 3 1 0])
Transfer function:
————————————
2 s^4 + 2 s^3 + 3 s^2 + s
>> w1=zpk(w)
Zero/pole/gain:
——————————————————
s (s+0.3966) (s^2 + 0.6034s + 1.261)
Более естественным является вариант, при котором с помощью функции ZPK создается символьная переменная 's', которая затем используется для определения передаточной функции в виде отношения (2). Например, после выполнения команд
s = zpk('s');
W1 = (s+0.1)/(s^2)
произойдет создание переменной W1 типа ZPK, определяющей передаточную функцию вида 2)1.0(1 ssW
Запуск SISO Design Tool осуществляется командой
>> sisotool
В появившемся окне 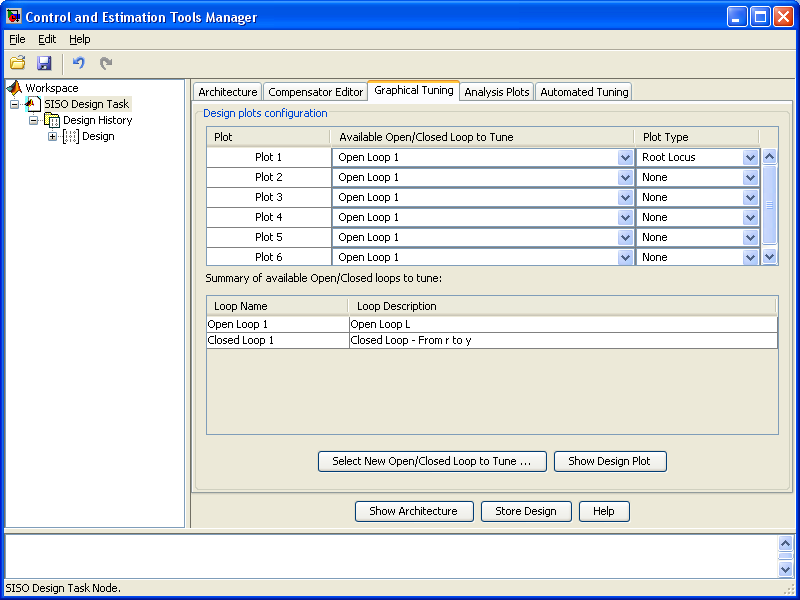 для создания схемы динамической системы необходимо использовать вкладки:
для создания схемы динамической системы необходимо использовать вкладки:
· Control Arhitecture- для выбора структурной схемы и вида обратной связи;
· System Data - для загрузки данных из рабочего пространства MatLab.
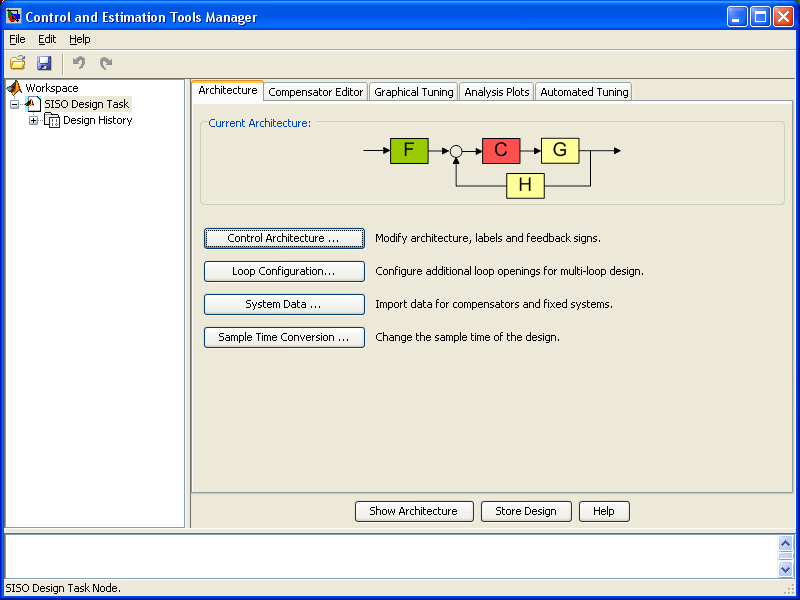
Рис.1
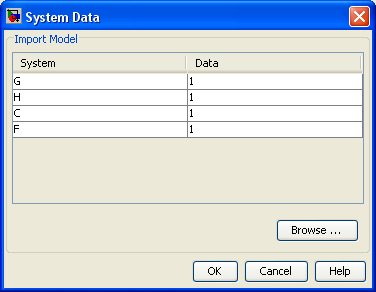
Рис.2
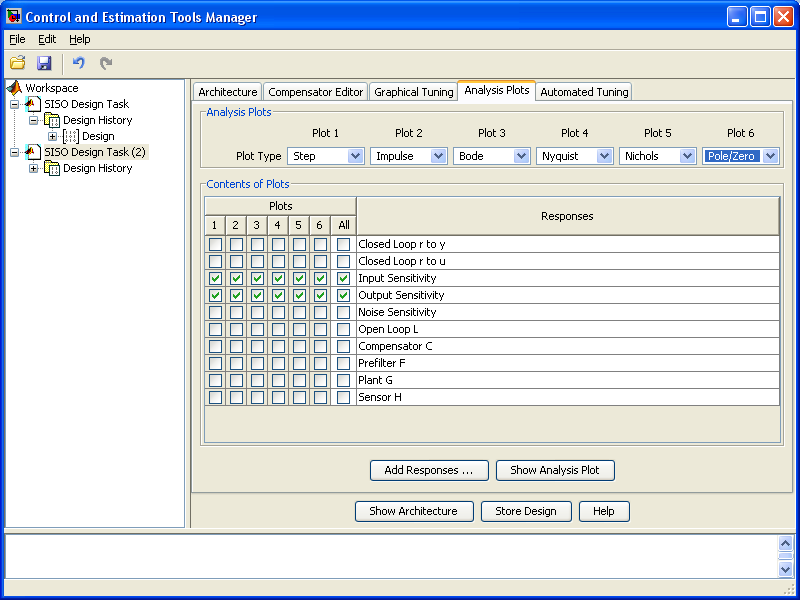
Далее необходимо выбрать во вкладке Analysis Plots виды характеристик и точки в которых эти характеристики будете рассматривать(рис.3).
Рис.3
Используя Root Locus Editor и значение коэффициента усиления (здесь C – Current Compensator), выполнить задания лабораторной работы. Изменение динамических и частотных характеристик замкнутой системы при изменении K можно проследить используя меню «Tools/Loop Responses».
После импортирования данных можно исследовать изменение временных и частотных характеристик замкнутой системы при изменении К.
Таким образом, выполнение лабораторной работы состоит из следующих шагов:
1. Изучите теоретические сведения.
2. Запустите систему MATLAB.
3. Создайте переменные W(1..N) типа ZPK, определяющие, необходимые вам, передаточные функции.
4. Запутите SISO Design Tool командой
>> sisotool
5. Выберите соответствующую структурную схему и вид обратной связи.
6. Загрузите данные из рабочего пространства MatLab, используя созданные переменные W(1…N). Необходимо, чтобы в результате импортирования данных получилась рассматриваемая схема САУ.
7. Выберите во вкладке Analysis Plots все виды характеристик.
8. Зафиксируйте полученные графики на выходе и входе.
9. Проведите анализ полученных характеристик, сделайте выводы.
10. Ответьте на контрольные вопросы.
11. Оформите отчет.
Отчет оформляется в соответствии с требованиями, предъявляемыми к оформлению лабораторных работ в вузе, и должен содержать титульный лист, формулировку цели работы, постановку задачи в соответствии с вариантом задания, результаты работы, выводы.
Контрольные вопросы
1. Дать определение передаточной функции, полюсов, нулей.
2. Назвать типовые звенья САУ.
3. Что такое отрицательная обратная связь?
4.








