 2015-05-10
2015-05-10 1091
1091Для измерения индуктивности и добротности катушек применяются схемы, показанные на рис. 8.
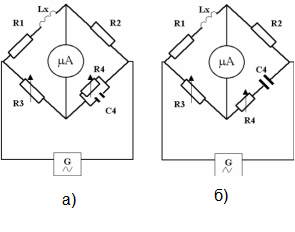
рис. 8
Первая из них предпочтительнее при малых добротностях (Q<30), а вторая - при больших (Q>30). Измеряемая катушка с индуктивностью Lx и сопротивлением Rx включается в первое плечо моста, образцовый конденсатор C4 и переменный резистор R4 - в противоположное плечо. Еще одним переменным элементом является резистор R3. Резистор R4 может быть включен либо параллельно (рис. 4а), либо последовательно (рис.4б) с образцовым конденсатором С4. Питание осуществляется от источника переменного тока G. В соответствии с (3) запишем условие равновесия моста для рис. 4а:
(Rx+jωLx)[1/(1/R4+jωC4)]=R2R3 (13)
где ω - частота напряжения питания.
Разделение действительных и мнимых составляющих уравнения приводит к соотношениям:
Rx= R2R3/R4 (14)
Lx=C4R2R3 (15)
В соотношения (14) и (15) не входит частота, следовательно, мост может быть уравновешен, даже если форма кривой питающего напряжения не чисто синусоидальная.
Добротность катушки определяется по формуле:
Q=ω Lx/ Rx=ω C4R4, (16)
При фиксированной частоте напряжения питания ω и постоянной емкости C4 шкалу переменного резистора R4 можно проградуировать в значениях добротности Qx,
Схеме моста, представленной на рис. 4б, соответствует следующее условие равновесия:
(Rx+jωLx)(R4+1)/jωC4)]=R2R3, (17)
которое соответствует системе уравнений:
 RxR4+Lx/C4=R2R3
RxR4+Lx/C4=R2R3
ωLx+ R4= R4/ωC4 (18)
решение которой относительно Rx и Lx дает:
Rx=ω2 C42 R2R3R4/[1+(ωC4R4)2], (19)
Lx= R2R3C4/[1+(ωC4R4)2], (20)
Q=ωLx/Rx=1/ωC4R4, (21)
т.е. шкала переменного резистора R4 снова может быть проградуирована в значениях добротности Qx.
В выражения (19) и (20) для Rx и Lx входит частота, поэтому мост является частотно зависимым. Равновесие имеет место только при некоторой частоте ω питающего напряжения. Если ее изменить, то равновесие нарушится.








