2015-05-12
2015-05-12 236
236Обозначим ускорение наблюдаемого движения аr. Ускорение аr вызвано равнодействующей силой F.
F = RM2 + ue +uк,
Перепишем его так:
mαr = RM2 + (-mαе) + (-mαк), и сравнимс выражением для полного ускорения:
α = αе + αr + αк,
или
α r = α = α е = α к.
Умножим обе части последнего выражения на m и сравнив с написанными выше, неинерциальный наблюдатель приходит к такому же утверждению, что и инерциальный:
RM2 = та.
Все последующие рассуждения относительно тела 1 остаются в силе, т.к. в связи с отсутствием массы тела 1 неинерциальность системы отсчета не вносит ничего нового.
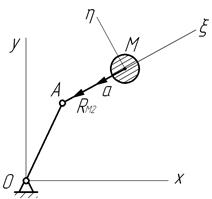
Возможен еще один способ выбора неинерциальных координат. Свяжем оси ξη с телом М, как показано на Фиг. 29.