 2015-05-12
2015-05-12 2317
2317Коробки скоростей обычной множительной структуры строятся путем последовательного соединения групп передач в одну кинематическую цепь. Выбор оптимальных конструктивных и кинематических порядков, соблюдение ограничения передаточных отношений передач, суммы зубьев их колес, чисел зубьев наименьших шестерен могут обеспечить наиболее простые и компактные схемы привода, отвечающие предъявленным требованиям. Однако многообразие условий работы станков и накладываемые ограничения не всегда приводят к оптимальным решениям. Вот почему в ряде случаев целесообразно отклоняться от классических принципов и проводить мероприятия, упрощающие схему привода в целом.
Приводы главного движения со сменными колесами значительно упрощают схему и конструкцию станка. Работа последнего длительное время без изменения скорости вращения шпинделя позволяет использовать в качестве множительной группы звено настройки со сменными колесами. На рисунке 6,а показана схема привода главного движения, у которого регулирование скорости вращения шпинделя осуществляется исключительно сменными колесами A – B. Наличие в схеме конических пар вызывается конструктивными соображениями. Передаточные отношения для них обычно равны 1: 1.
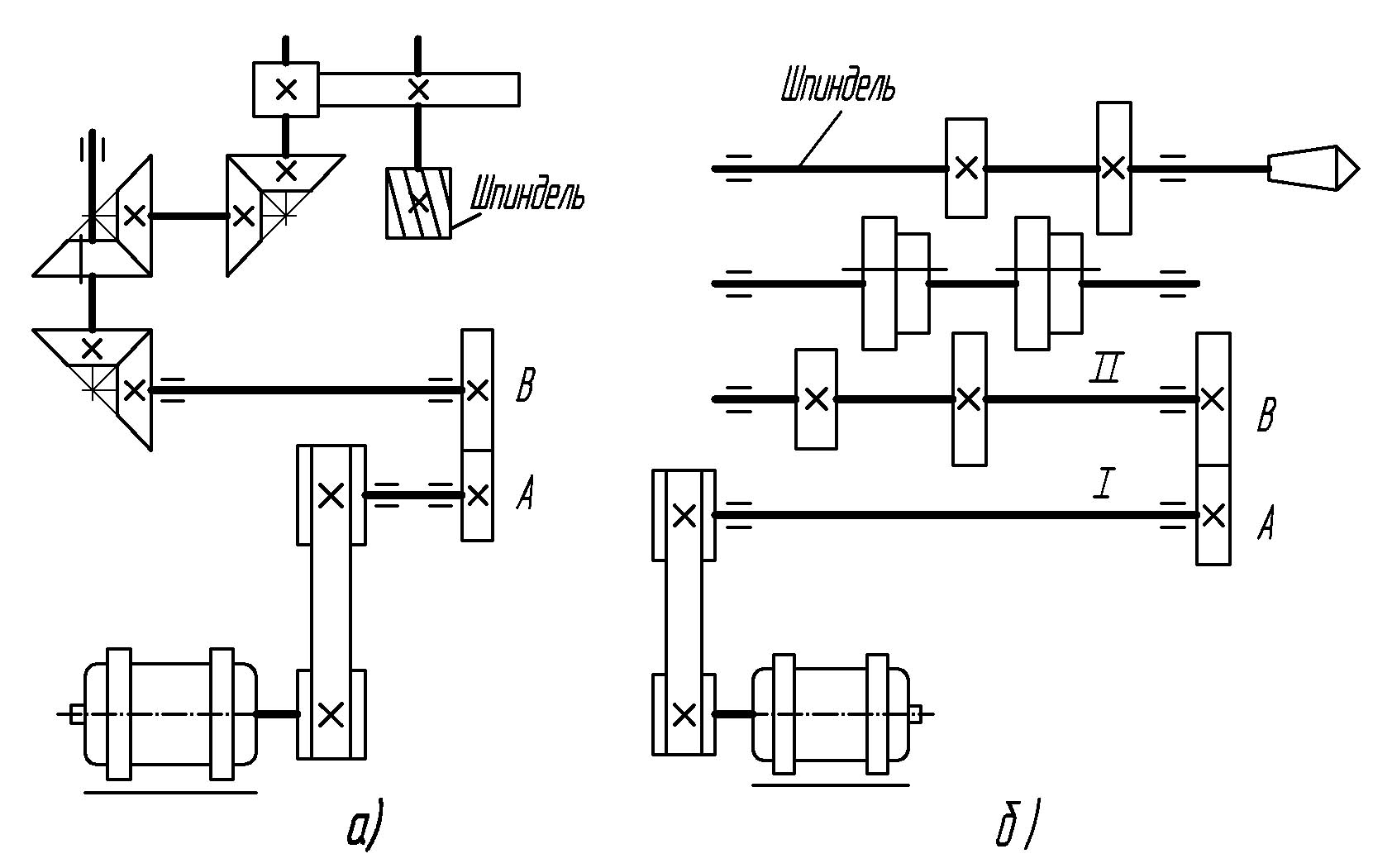
Рисунок 6.
В коробке скоростей приведенной на рисунке 6,б, первая группа состоит из сменных колес A – B, а вторая и третья содержат по две пары передач. Следовательно, имеется возможность ступенчатого регулирования чисел оборотов шпинделя путем переключения блоков, а установка сменных колес смещает область регулирования вдоль ряда скоростей вращения.
Сменные колеса желательно размещать в первой основной группе, так как число пар сменных колес может быть большим. Графики чисел оборотов строятся по методике, изложенной выше.
Число пар сменных колес колеблется в пределах 2 – 10. Если принять для коробки скоростей (рисунок 6,б) рсм = 6, то число ступеней скорости при этой простой схеме будет z = 61 ∙ 26 ∙ 212 = 24.
Множительные структуры с измененными характеристиками групп передач. Нередко причиной отказа от обычной множительной структуры является высокое значение характеристики последней переборной группы и в связи с этим недопустимо малое передаточное отношение одной из передач (см. тему Передаточные отношения передач). Путем искусственного уменьшения характеристик можно с некоторыми отклонениями сохранить желательную структуру.
Вернемся к схеме привода со структурой z = 12 = 31 ∙ 23 ∙26 (рисунок 4 и 3,б). Минимальное передаточное отношение  при φ = 1,41 ÷ 1,58 принимает недопустимое значение
при φ = 1,41 ÷ 1,58 принимает недопустимое значение  . Этого можно избежать, если уменьшить характеристику последней группы. Примем для примера x 3 = 4 и построим график для структуры z = 12 = 31 ∙ 23 ∙24 (рисунок 7,а).
. Этого можно избежать, если уменьшить характеристику последней группы. Примем для примера x 3 = 4 и построим график для структуры z = 12 = 31 ∙ 23 ∙24 (рисунок 7,а).
Из графика следует, что  . Но одновременно с этим уменьшился диапазон регулирования (φ 9),уменьшилось число ступеней скорости (z = 10), так как две скорости (на графике отмечены затемненными кружками) повторяются.
. Но одновременно с этим уменьшился диапазон регулирования (φ 9),уменьшилось число ступеней скорости (z = 10), так как две скорости (на графике отмечены затемненными кружками) повторяются.
Рассмотрим другой случай. Увеличим характеристики первой и второй групп до значения x 1 = 2, x 2 = 5. Структура примет вид z = 12 = 32 ∙ 25 ∙26. Строим картину скоростей (рисунок 7,б). Она свидетельствует о сохранении минимального передаточного отношения  , но одновременно расширяется диапазон регулирования (φ 15) вследствие выпадения отдельных скоростей в нижней и верхней части ряда, где знаменатель принимает величину, равную φ 2. Такой ряд называют ломаным. Если, например, φ = 1,26, то диапазон регулирования при обычном кинематическом варианте, когда z = 31 ∙ 23 ∙26 будет D = 1,2611 ≈ 14; в данном случае (z =32 ∙ 25 ∙26) он составит D = 1,2615 = 32. Более подробно см. в специальной литературе [1].
, но одновременно расширяется диапазон регулирования (φ 15) вследствие выпадения отдельных скоростей в нижней и верхней части ряда, где знаменатель принимает величину, равную φ 2. Такой ряд называют ломаным. Если, например, φ = 1,26, то диапазон регулирования при обычном кинематическом варианте, когда z = 31 ∙ 23 ∙26 будет D = 1,2611 ≈ 14; в данном случае (z =32 ∙ 25 ∙26) он составит D = 1,2615 = 32. Более подробно см. в специальной литературе [1].
Рисунок 7.
Коробки скоростей со связанными колесами. Для уменьшения количества зубчатых колес и осевых габаритов коробок скоростей применяют передачи со связанными колесами. Сущность данного мероприятия заключается в следующем. Пусть коробка скоростей, изображенная на рисунке 8,а, имеет две группы передач: 1 – 2, 3 – 4, 5 – 6, 7 – 8.
Рисунок 8.
Если подобрать числа зубьев колес 4 и 5 так, чтобы они были одинаковы (z 4 = z 5), то представляется возможность оба колеса объединить в одно колесо (рисунок 8,б). Оно одновременно принадлежит и первой и второй группам, работает в качестве и ведомого, и ведущего звена. Подобные колеса называют связанными.
Аналогичным образом можно объединить колеса 2 и 7. Тогда привод будет содержать два связанных колеса (рисунок 8,в). Количество связанных колес может быть б о льшим – три, четыре, в зависимости от структуры привода.
Кинематический расчет коробок скоростей с одним связанным колесом затруднений не представляет. При большом количестве связанных колес расчет осложняется, так как обычные методы расчета не приводят к оптимальным вариантам. Более подробно см. в специальной литературе [1].
Лекция №7.

