2015-05-13
2015-05-13 8352
8352В основе работы ДИСС лежит физический эффект Доплера, заключающихся в том, что частота колебаний f ПРМ, принятых от какого- либо источника, оказывается на равной частоте колебаний f ПРД, излученных этим источником, если источник и приемник колебаний перемещаются друг относительно друга. Изменение частоты тем больше, чем больше скорость движения приемника относительно передатчика или, наоборот, передатчика относительно приемника, причем если источник приближается к приемнику, то принимаемая частота будет выше излучаемой, и наоборот f ПРМ < f ПРД. Такой же эффект имеет место, если передатчик и приемник неподвижны друг относительно друга и находятся на движущемся объекте, а колебания принимаются после отражения от неподвижной земли. Величина отклонения частоты принятого сигнала называется доплеровским сдвигом частоты или доплеровской частотой FД =f ПРМ - f ПРД.
Для выяснения зависимости доплеровской частоты FД от величины и направления путевой скорости Wп предположим, что самолет (см. рис.3) выполняет горизонтальный полет.

Рис.3 Принцип определения путевой скорости и угла сноса
однолучевым доплеровским измерителем.
При этом вектор путевой скорости  составляет с продольной осью самолета угол сноса
составляет с продольной осью самолета угол сноса  . Предположим, что антенна ДИСС формирует бесконечно узкий луч, составляющий с вектором путевой скорости угла
. Предположим, что антенна ДИСС формирует бесконечно узкий луч, составляющий с вектором путевой скорости угла  (эта) и с поверхностью земли угол
(эта) и с поверхностью земли угол  (гамма). Положение луча может характеризоваться также углом визирования
(гамма). Положение луча может характеризоваться также углом визирования  (дельта). При этом на земле облучается точечный отражатель А. В начальном положении вертикальная плоскость, в которой находится луч антенны, повернута относительно продольной оси самолета на угол
(дельта). При этом на земле облучается точечный отражатель А. В начальном положении вертикальная плоскость, в которой находится луч антенны, повернута относительно продольной оси самолета на угол  (тета).
(тета).
Для простоты рассуждений предположим также, что передатчик вырабатывает непрерывные синусоидальные колебания, которые запишем в виде  . Эти колебания с частотой
. Эти колебания с частотой  , как прямой сигнал поступают в передающую антенну и в радиоприемник, как опорный. Облучая точечный отражатель и отражаясь в точке А от поверхности земли, сигнал принятый антенной, поступает на вход радиоприемника с частотой
, как прямой сигнал поступают в передающую антенну и в радиоприемник, как опорный. Облучая точечный отражатель и отражаясь в точке А от поверхности земли, сигнал принятый антенной, поступает на вход радиоприемника с частотой  , т.к запаздывает относительно прямого сигнала (с частотой ) на время
, т.к запаздывает относительно прямого сигнала (с частотой ) на время  , необходимое для прохождения расстояния
, необходимое для прохождения расстояния  от самолета до отражающей точки земли А и обратно:
от самолета до отражающей точки земли А и обратно:  , где
, где  — скорость распространения радиоволн.
— скорость распространения радиоволн.
Запаздывание по времени приводит к сдвигу фазы сигнала на величину:  .
.
Если не учитывать дополнительного постоянного сдвига фазы колебаний при отражении от поверхности земли, то поступающий на вход приемника отраженный сигнал можно записать в виде:  , где
, где  – фаза отраженных колебаний.
– фаза отраженных колебаний.
Поскольку мгновенная частота колебаний является производной фазы по времени, то частоту отраженного сигнала  найдем путем дифференцирования фазы:
найдем путем дифференцирования фазы: 
В полученном выражении производная  является скоростью сближения
является скоростью сближения  самолета с точкой отражающей поверхности А, то есть является проекцией путевой скорости самолета на направление радиолуча:
самолета с точкой отражающей поверхности А, то есть является проекцией путевой скорости самолета на направление радиолуча:  (1)
(1)
С учетом выражения (1) получаем  .
.
Доплеровский сдвиг частоты  найдем как разность частот отраженного и прямого сигналов на входе приемника:
найдем как разность частот отраженного и прямого сигналов на входе приемника:  .
.
Принимая во внимание, что  и
и  , после преобразования получаем
, после преобразования получаем  . (2)
. (2)
Но так как  , то
, то  (3)
(3)
Из выражения (3) следует, что между доплеровской частотой  и путевой скоростью
и путевой скоростью  существует прямая пропорциональная зависимость, но непосредственно из этого выражения путем измерения еще нельзя определить
существует прямая пропорциональная зависимость, но непосредственно из этого выражения путем измерения еще нельзя определить  , так как угол
, так как угол  в общем случае неизвестен. Однако на рис. 3 видно, что
в общем случае неизвестен. Однако на рис. 3 видно, что  . Следовательно,
. Следовательно,  (4)
(4)
Полученные выше выражения для доплеровской частоты являются приближенными, хотя точность их достаточна для практических приложений. Точное выражение для доплеровской частоты может быть получено методами теории относительности.
Уравнение (4) при постоянных значениях длины волны передатчика  и угла наклона радиолуча к поверхности земли
и угла наклона радиолуча к поверхности земли  определяет зависимость доплеровской частоты от путевой скорости и угла (
определяет зависимость доплеровской частоты от путевой скорости и угла ( ) между направлением путевой скорости самолета и горизонтальной проекцией радиолуча. Если антенна ДИСС выполнена так, что горизонтальная проекция радиолуча всегда совпадает с направлением продольной оси антенны, то можно считать, что уравнение (4) определяет зависимость от и угла между вектором путевой скорости и продольной осью антенны, лежащей в горизонтальной плоскости.
) между направлением путевой скорости самолета и горизонтальной проекцией радиолуча. Если антенна ДИСС выполнена так, что горизонтальная проекция радиолуча всегда совпадает с направлением продольной оси антенны, то можно считать, что уравнение (4) определяет зависимость от и угла между вектором путевой скорости и продольной осью антенны, лежащей в горизонтальной плоскости.
График указанной зависимости, построенный в полярной системе координат, показан на рис. 4.
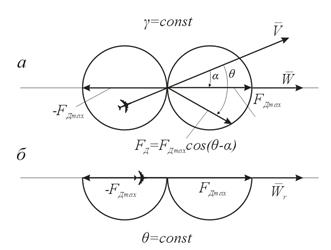
Рис.4. Полярные диаграммы средней доплеровской частоты:
а - для горизонтальной плоскости; б - для вертикальной плоскости.
Из графика видно, что при повороте антенны вокруг вертикальной оси доплеровская частота изменяется и по величине и по знаку. В частности, когда проекция радиолуча на горизонтальную плоскость, а, следовательно, и продольная ось антенны совпадают с направлением путевой скорости самолета ( ), доплеровская частота имеет максимальное положительное значение:
), доплеровская частота имеет максимальное положительное значение:
Если ось антенны повернута назад относительно направления полета самолета, то доплеровская частота имеет отрицательный знак.
Это указывает на то, что частота отраженного сигнала оказывается меньше частоты передатчика на величину доплеровского сдвига.
Таким образом, используя уравнение (4), можно определить угол сноса и путевую скорость самолета путем поворота антенны в горизонтальной плоскости до положения, при котором доплеровская частота достигает наибольшего значения. При этом положении антенны отсчитывают угол сноса по указателю углов поворота антенны в относительно продольной оси самолета, и определяет величину путевой скорости из уравнения (4).
Попутно заметим, что если луч антенны вращать по конической поверхности вокруг вектора путевой скорости, оставляя угол постоянным, то в соответствии с выражением (3) доплеровская частота остается постоянной. При этом конец радиолуча, пробегая по поверхности земли, прочертит на ней кривую (см. рис.5) гиперболической формы.
Эта гипербола характерна тем, что отражение электромагнитных волн от любой точки, расположенной на ней, приводит к появлению доплеровской частоты одной и той же величины. Поэтому гипербола называется изочастотной линией. Указанное обстоятельство, следует учитывать при выборе формы диаграммы направленности антенны, о чем будет сказано ниже.
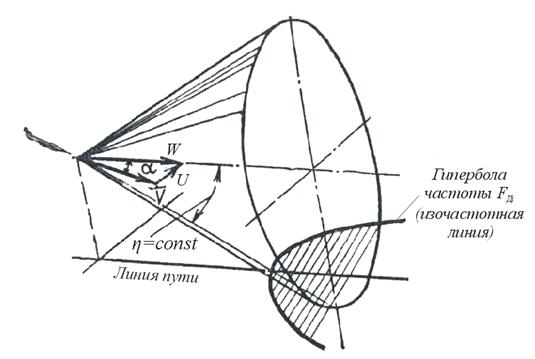
Рис. 5. Местоположение на Земле изочастотной линии
Упрощенная структурная схема однолучевого ДИСС приведена на рис.6. Эта схема подобна схеме радиолокационной станции. Однако в отличие от радиолокационных станций в ДИСС измеряется не время запаздывания, а доп
 |
леровский сдвиг частоты отраженного сигнала.
Рис.6 Упрощенная структурная схема однолучевого ДИСС.
Принцип работы ДИСС заключается в следующем. Передатчик вырабатывает непрерывные колебания частоты  , которые подаются одновременно в передающую антенну, как прямой и радиоприемник, как опорные. Антенна формирует узкий луч в направлении земной поверхности под некоторым углом к продольной оси самолета. Отраженный сигнал с запаздыванием по времени поступает в приёмную антенну и подается на вход радиоприемника. В результате взаимодействия опорного и отраженного сигналов на входе радиоприёмника выделяется сигнал с доплеровской частотой FД =f ОТР - f П. В радиоприемнике происходит усиление сигналов, преобразование и выделение колебаний
, которые подаются одновременно в передающую антенну, как прямой и радиоприемник, как опорные. Антенна формирует узкий луч в направлении земной поверхности под некоторым углом к продольной оси самолета. Отраженный сигнал с запаздыванием по времени поступает в приёмную антенну и подается на вход радиоприемника. В результате взаимодействия опорного и отраженного сигналов на входе радиоприёмника выделяется сигнал с доплеровской частотой FД =f ОТР - f П. В радиоприемнике происходит усиление сигналов, преобразование и выделение колебаний  . Выделенный доплеровский сигнал поступает на измеритель частоты. Так как доплеровская частота прямо пропорциональна путевой скорости ЛА, то прибор, включенный на выходе измерителя частоты, градуируется непосредственно в единицах скорости. В момент времени, когда доплеровская частота достигает наибольшего значения
. Выделенный доплеровский сигнал поступает на измеритель частоты. Так как доплеровская частота прямо пропорциональна путевой скорости ЛА, то прибор, включенный на выходе измерителя частоты, градуируется непосредственно в единицах скорости. В момент времени, когда доплеровская частота достигает наибольшего значения  по шкале прибора отсчитывается путевая скорость Wп и угол сноса
по шкале прибора отсчитывается путевая скорость Wп и угол сноса  с помощью стрелочного индикатора, связанного с механизмом поворота антенны и указывающего направление горизонтальной оси антенны относительно продольной оси самолета.
с помощью стрелочного индикатора, связанного с механизмом поворота антенны и указывающего направление горизонтальной оси антенны относительно продольной оси самолета.
Рассмотренный способ измерения угла сноса и величины путевой скорости с помощью однолучевой поворотной антенны по максимуму доплеровской частоты достаточно прост в практическом исполнении, однако имеет следующие принципиальные недостатки.
1. Нельзя с высокой точностью определить момент, когда достигнет максимума, так как максимум обычно оказывается расплывчатым. Поэтому угол сноса и путевая скорость измеряются с малой точностью.
2. Невозможно учесть влияние вертикальной WY составляющей полной Wg скорости ЛА на результат измерений.
До сих пор мы принимали, что полет ЛА происходит в горизонтальной плоскости. При этом допущении доплеровская частота определялась путевой скоростью Wп. Если же ЛА летит с набором высоты или снижается, то появляется вертикальная составляющая полной скорости, которая не дает приращения горизонтального пути ЛА, но входит в результат измерений. При кабрировании результат оказывается заниженным (- ), при пикировании — завышенным (+ ).
Действительно, если, например, ЛА летит с набором высоты с полной скоростью (см. рис. 7) и антенна находится в горизонтальном положении, то в соответствии с выражением (3) можно записать:
 (5)
(5)
Принимая во внимание, что  (путевая скорость) и
(путевая скорость) и  (вертикальная составляющая), выражение (5) запишется в виде:
(вертикальная составляющая), выражение (5) запишется в виде:  (6)
(6)
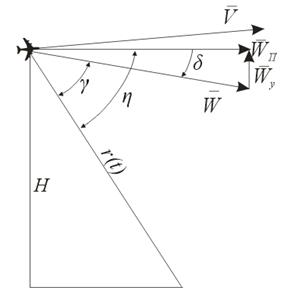
Рис.7. Составляющие полной скорости самолета
Первый член полученного выражения  характеризует путевую скорость. Второй член выражения характеризует погрешность измерений, обусловленную влиянием вертикальной составляющей полной скорости.
характеризует путевую скорость. Второй член выражения характеризует погрешность измерений, обусловленную влиянием вертикальной составляющей полной скорости.
3. Точность определения путевой скорости при однолучевом способе в сильной степени зависит от стабильности частоты передатчика . Даже незначительный уход частоты за время прохождения сигналом расстояния до земли и обратно непосредственно сказывается на величине разностной частоты , что приводит к дополнительным погрешностям измерения.
Все эти и ряд других недостатков связаны с тем, что информация о путевой скорости ЛА поступает только с одного направления, от одного радиолуча. В целях уменьшения погрешностей необходимо получать информацию не с одного, а с нескольких направлений и для этого требуется многолучевая антенная система.
Заключение
Для повышения точности измерения навигационных параметров путевой скорости и угла сноса на борту ЛА и исключения принципиальных недостатков однолучевых доплеровских измерителей широкое применение нашли измерители с многолучевыми антенными системами, формирующими два, три или четыре радиолуча.
В соответствии с этим измерители называются двухлучевыми, трехлучевыми и четырехлучевыми.
Литература
1. Ярлыков М.С. Авиационные радионавигационные устройства и системы. М.,ВВКА им. Н.Жуковского, 1980.
2. Вертоградов В.И. Радиоэлектронное оборудование ЛА. М., Воениздат, 1979.
3. Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. М., Радио и связь, 1994.
Содержание
Введение 4
1. Назначение доплеровского измерителя путевой скорости и угла сноса 5