 2015-05-13
2015-05-13 2105
2105Принцип действия системы сводится к намерению разности расстояний от летательного аппарата (ЛА) до двух пар наземных станции.
Причем одну пару составляют: ведущая и первая ведомая станции, а вторую пару — ведущая и вторая ведомая станции радионавигационной цепи.
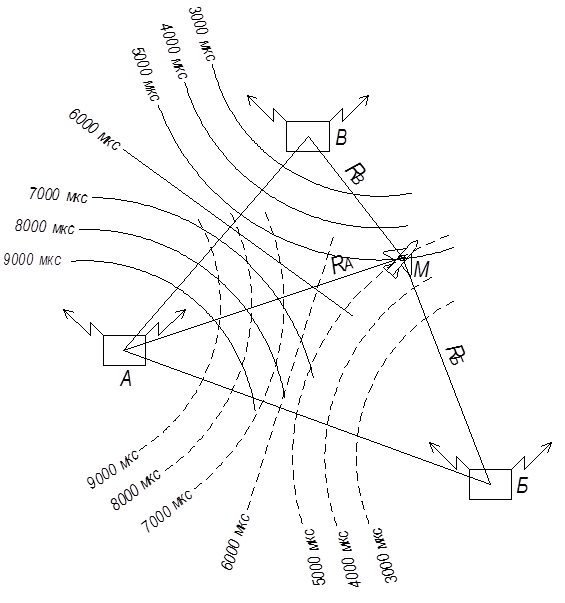
Измеряя разность расстояний от самолета до двух опорных передающих станций, можно определить одну линию положения. Такой линией, для которой разность расстояния до двух опорных станций является величиной постоянной, будет гипербола. Но для определения местоположения ЛА необходимо получить по меньшей мере две линии положения (гиперболы), поэтому необходимо измерять разность расстояния от ЛА до 2-х других опорных станций. Для этого необходимо иметь не менее 3-х наземных станций. Местоположение ЛА определяется как точка пересечения двух гипербол, в фокусах которых расположены опорные станции радионавигационной цепи, одна из которых ведущая, а две другие — ведомые (Б, В). Создается сетка из семейства гипербол, которые наносятся на штурманские карты. В точке М местоположения ЛА принимают сигнал передающих станций с помощью специального приемного устройства и измеряют промежуток времени между приходом сигналов от двух станций.
Пример размещения передающих станций (ведущей и ведомой — 2х) и гиперболической системы координат приведен на рис. 6.
Излучение сигналов передающими наземными станциями производится в строгой временной последовательности. Ведомые станции, приняв сигналы от ведущей станции, излучают пачку импульсных сигналов с кодовой зыдержкой  , имеющей определенную величину для каждой из ведомых станций цепочки.
, имеющей определенную величину для каждой из ведомых станций цепочки.
В точке приема (т. М) производится измерение временных интервалов:
 ;
;
 ,
,
где  ,
,  — время распространения радиоволн вдоль базы (вдоль линии, соединяющей ведущую (А) и ведомые станции (Б и В);
— время распространения радиоволн вдоль базы (вдоль линии, соединяющей ведущую (А) и ведомые станции (Б и В);
 ,
,  — время кодовой задержки запуска ведомых станций (Б и В);
— время кодовой задержки запуска ведомых станций (Б и В);
 — время распространения радиоволн от ведущей станции А до летательного аппарата (т. М);
— время распространения радиоволн от ведущей станции А до летательного аппарата (т. М);
 ,
,  — время распространения радиоволн от ведомых станций Б и В до летательного аппарата.
— время распространения радиоволн от ведомых станций Б и В до летательного аппарата.
Введение кодовой задержки () позволяет иметь всегда положительное значение разности между временным положением сигналов станции А и станции Б и В ( ,
,  ) данной цепочки.
) данной цепочки.
|
Параметры и  — величины постоянные. Зная и можно определить навигационные параметры:
— величины постоянные. Зная и можно определить навигационные параметры:
 ;
;  .
.
Эти параметры  и
и  — пропорциональны разности расстояний (
— пропорциональны разности расстояний ( ,
,  ) от ЛА (точка М) до двух пар наземных станций: А-Б; А-В,
) от ЛА (точка М) до двух пар наземных станций: А-Б; А-В,
 ,
,
 ,
,
где: С — скорость распространения радиоволн.
Гиперболы, нанесенные на карту, оцифровываются в микросекундах, с учетом кодовых задержек ведомых станций () и времени распространения радиоволн вдоль базы ().
Ведомые станции одной цепочки различаются по величине кодовой задержки ().
'Гак как в основу работы системы положен принцип измерения разности расстояний от летательного аппарата до наземных станций, поэтому такие системы называются разностно-дальномерными или гиперболическими.
Таким образом определение местоположения ЛА производится по специальным гиперболическим картам путем нахождения точки пересечения гипербол, номера которых соответствуют отсчетам навигационных параметров, индицируемых в микросекундах на индикаторе приемного устройства бортовой аппаратуры ЛА.
Эти же навигационные параметры в виде двоичного кода могут вызываться в БЦВМ пилотажно-навигационного комплекса для коррекции автономных средств навигации.
Кроме того к бортовой аппаратуре могут подключаться специализированные вычислители — преобразователи координат цифровые (ПКЦ). При этом гиперболические координаты преобразуются в географические или ортодромические.








