2015-05-13
2015-05-13 3759
3759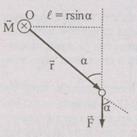 Опыт показал, что при вращении тела, например закручивании болта гаечным ключом, существенным оказывается понятие момента силы, а не только модуля силы и длины рычага. Вектором момента силы относительно точки О (рис) называют вектор М, модуль которого равен произведению модуля силы F на ее плечо I
Опыт показал, что при вращении тела, например закручивании болта гаечным ключом, существенным оказывается понятие момента силы, а не только модуля силы и длины рычага. Вектором момента силы относительно точки О (рис) называют вектор М, модуль которого равен произведению модуля силы F на ее плечо I
М = Frsina = Fℓ, Н·м.
Момент силы относительно неподвижной точки О представляет векторное произведение радиуса-вектора  точки приложения силы на силу
точки приложения силы на силу  :.
:.  = [ ]. Радиус-вектор г, проведенный из точки О в точку приложения силы, и сила F лежат в плоскости рисунка. Вектор момента силы перпендикулярен плоскости рисунка. Его направление определяется по правилу правого винта. Поворот головки винта в направлении силы вызывает перемещение винта в направлении вектора момента силы. В данном случае вектор момента силы направлен от нас и изображен на рисунке 3.3 кружком с крестиком. Точка О находится в центре кружка.
= [ ]. Радиус-вектор г, проведенный из точки О в точку приложения силы, и сила F лежат в плоскости рисунка. Вектор момента силы перпендикулярен плоскости рисунка. Его направление определяется по правилу правого винта. Поворот головки винта в направлении силы вызывает перемещение винта в направлении вектора момента силы. В данном случае вектор момента силы направлен от нас и изображен на рисунке 3.3 кружком с крестиком. Точка О находится в центре кружка.
Плечом силы называют длину перпендикуляра, опущенного из точки О на прямую, вдоль которой действует сила.
Проекция вектора на неподвижную ось z является скалярной физической величиной и называется моментом силы относительно оси z (рис. 3.4): Mz= [ ]. Значение момента Мг не зависит от выбора положения точки О на оси z.
Моментом инерции тела относительно оси вращения z называют сумму произведений масс п материальных точек этого тела на квадраты их расстояний до этой оси
 кг·м2.
кг·м2.
 Указанную сумму можно свести к интегралу J=∫r2dm. Здесь величину r следует понимать как функцию положения точки с координатами х, у, z.
Указанную сумму можно свести к интегралу J=∫r2dm. Здесь величину r следует понимать как функцию положения точки с координатами х, у, z.
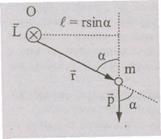
По аналогии с моментом силы можно получить еще одну важную векторную характеристику вращающейся материальной точки — момент импульса материальной точки относительно точки О.  , где
, где  - радиус-вектор, определяющий положение материальной точки относительно точки О, а
- радиус-вектор, определяющий положение материальной точки относительно точки О, а  — импульс этой материальной точки. Модуль момента импульса материальной точки можно представить в виде произведения (рис)
— импульс этой материальной точки. Модуль момента импульса материальной точки можно представить в виде произведения (рис)
L = rpsina = рℓ, Дж·с.
Если материальная точка движется прямолинейно, то модуль момента импульса равен L = mvl, при движении материальной точки по окружности радиусом R момент импульса относительно центра окружности равен L = mvR.
Момент импульса твердого тела относительно оси z представляет собой сумму моментов импульса отдельных частиц
 , Дж·с.
, Дж·с.
Используя формулу  получим
получим  , то есть
, то есть
Lz=Jzω, Дж·с. (3.6)
Следует обратить внимание на то, что у ω индекс не ставится, так как эта величина одинакова для всех точек тела.
Итак, момент импульса твердого тела относительно оси z равен произведению момента инерции тела относительно той же оси на его угловую скорость.
Итак, момент импульса твердого тела относительно оси z равен произведению момента инерции тела относительно той же оси на его угловую скорость.
Продифференцируем уравнение (3.6) по времени 
Момент силы относительно оси z может быть преобразован к виду:

Таким образом, dLz/dt = M. Наряду с изложенным, имеет место векторное равенство  . В изолированной системе момент внешних сил отсутствует, то есть
. В изолированной системе момент внешних сил отсутствует, то есть  = 0 и
= 0 и  , а следовательно, момент импульса изолированной системы остается постоянным:
, а следовательно, момент импульса изолированной системы остается постоянным:  const.
const.
Подобно законам сохранения энергии и импульса, закон сохранения момента импульса принадлежит к числу фундаментальных законов природы. Моментом импульса обладают не только движущиеся макроскопические системы, но и отдельные элементарные частицы, а также атомные ядра, атомы, их ассоциативные комплексы. Причем некоторые элементарные частицы и их системы могут иметь моменты импульса, не связанные с движением в пространстве, и называют их спинами.
Из равенства Мz =Jz dw /dt с учетом того, что dw/dt представляет собой угловое ускорение, следует основной закон динамики вращательного движения твердого тела относительно неподвижной оси
Мz= Jze, H • м.
Очевидно, что угловое ускорение, сообщаемое телу моментом силы, тем больше, чем меньше момент инерции, то есть момент инерции характеризует инерционные свойства тела при вращательном движении. Но в отличие от массы, момент инерции конкретного тела может иметь множество значений соответственно множеству возможных осей вращения.