 2015-06-04
2015-06-04 1585
1585Существуют различные методы компенсации статических погрешностей ЦАП. Основным классификационным признаком методов является класс учитываемых ошибок. По этому признаку выделяются следующие методы:
1. Коррекция масштаба и нулевой точки характеристики;
2. Коррекция отклонения коммутируемых мер;
3. Коррекция нелинейности общего вида (как интегральной, так и дифференциальной).
Прежде всего, коррекция погрешностей производится при изготовлении преобразователей (технологическая подгонка). Однако, часто она желательна и при использовании конкретного образца БИС в том или ином устройстве. В последнем случае коррекция проводится за счет введения в структуру устройства кроме БИС ЦАП дополнительных элементов, т. е. на структурном уровне. Вследствие этого такие методы получили название структурных.
В состав ЦАП входят различные функциональные узлы. При осуществлении подгонки каждый из узлов подгоняется независимо от других. Алгоритм подгонки должен, прежде всего, обеспечить монотонность функции преобразования, затем ее линейность, отсутствие смещения нуля и требуемый коэффициент преобразования.
Самым сложным процессом является обеспечение монотонности и линейности, ибо они определяются связанными параметрами многих элементов и узлов. Чаще всего осуществляют подгонку только смещения нуля, коэффициента преобразования и дифференциальной нелинейности симметричного типа, т.е. нелинейности обусловленной погрешностями делителя и той части погрешностей ключей, которые можно свести к погрешностям такого рода. Остального рода погрешности носят суперпозиционный характер, т.е. проявляются во взаимовлиянии элементов друг на друга. Такие погрешности выявлять, контролировать и корректировать очень сложно.
Точностные параметры, обеспечиваемые технологическими приемами, ухудшаются при воздействии на преобразователь различных дестабилизирующих факторов, в первую очередь – температуры. Необходимо помнить и о факторе старения элементов.
С ростом точности затраты на разработку преобразователей и их изготовление всегда растут. С учетом всего этого улучшения метрологических показателей рационально добиваться комплексно, используя технологические приемы с различными структурными методами. А при использовании готовых интегральных преобразователей структурные методы это единственный путь дальнейшего повышения метрологических характеристик системы преобразования.
Погрешность смещения нуля и масштабная погрешность легко корректируются на выходе ЦАП. Для этого в выходной сигнал вводят постоянное смещение, компенсирующее смещение характеристики преобразователя. Необходимый масштаб преобразования устанавливают, либо корректируя коэффициент усиления, устанавливаемого на выходе преобразователя усилителя, либо подстраивая величину опорного напряжения, если ЦАП является умножающим.
Среди структурных методов линеаризации характеристики необходимо выделить компенсационные методы и методы с контролем по тестовому сигналу.
Компенсационные методы заключаются во введении в структуру преобразователя вспомогательных резистивных матриц, управляемых кодом, обратным коду, подаваемому на основную матрицу. Это позволяет уменьшить паразитное влияние кодозависимых токов, протекающих по общим шинам земли и питания, стабилизирует рассеиваемую мощность и тепловой режим схемы.
Методы коррекции с тестовым контролем заключаются в идентификации погрешностей ЦАП на всем множестве допустимых входных воздействий и добавлением, рассчитанных на основе этого поправок, к входной или выходной величине для компенсации этих погрешностей.
При любом методе коррекции с контролем по тестовому сигналу предусматриваются следующие действия:
1. Измерение характеристики ЦАП на достаточном для идентификации погрешностей множестве тестовых воздействий.
2. Идентификация погрешностей вычислением их отклонений по результатам измерений.
3. Вычисление корректирующих поправок для преобразуемых величин или требуемых корректирующих воздействий на корректируемые блоки.
4. Проведение коррекции.
Первые три пункта относятся к процессу контроля, последний пункт - к процессу преобразования, т.к. проведение коррекции осуществляется во время преобразования.
Контроль может проводиться один раз перед установкой преобразователя в устройство с помощью специального лабораторного измерительного оборудования. Может проводиться и с помощью специализированного оборудования встроенного в устройство. При этом контроль, как правило, проводится периодически, все то время пока преобразователь не участвует непосредственно в работе устройства. Это обеспечивает долговременную метрологическую стабильность работы преобразователя даже при постоянном воздействии на него каких-либо дестабилизирующих факторов. Такая организация контроля и коррекции преобразователей может осуществляться при его работе в составе микропроцессорной измерительной системы.
Простейшая модель нелинейной составляющей погрешности ЦАП основана на допущении стабильности погрешности для каждого кода и случайной зависимости ее от кода. Очевидно, что идентификация параметров такой модели требует измерения выходного сигнала на всех допустимых кодах (метод сквозного контроля). Обязательным для этого метода является использование прецизионного измерителя.
Основной недостаток любого метода сквозного контроля – большое время контроля наряду с разнородностью и большим объемом используемой аппаратуры.
Большая группа методов контроля по тестовому сигналу основывается на предположении о независимости весов разрядов от преобразуемого кода. При этом можно составить систему независимых уравнений, число которых равно количеству корректируемых разрядов преобразователя. Часто эту систему уравнений добавляют еще двумя, определяющими погрешность смещения нуля и масштабную погрешность. Для составления каждого уравнения на вход преобразователя подают код из заданного набора. После разрешения такой системы уравнений удается найти погрешности задания каждого разряда, а, следовательно, и поправочное (компенсирующее) значение для каждого значения входного кода. Такие методы получили в настоящее время наибольшее распространение и применяются при построении микропроцессорных управляющих систем.
Определенные тем или иным способом величины поправок хранятся, как правило, в цифровой форме. Коррекция же погрешностей с учетом этих поправок может проводиться как в аналоговой, так и цифровой форме.
При цифровой коррекции поправки добавляются с учетом их знака к входному коду ЦАП. В результате на вход ЦАП поступает код, при котором на его выходе формируется требуемое значение напряжения или тока. Наиболее простая реализация такого способа коррекции состоит из корректируемого ЦАП, на входе которого установлено цифровое ЗУ (рис.17.а). Входной код играет роль адресного. В ЗУ по соответствующим адресам занесены, заранее рассчитанные с учетом поправок, значения кодов, подаваемые на корректируемый ЦАП.

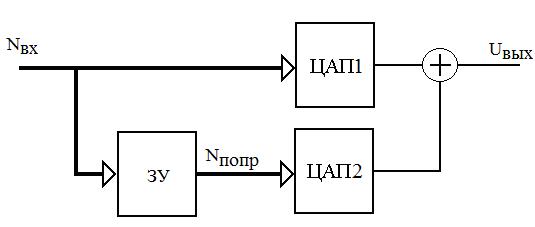
Рис. Цифровая (а) и аналоговая (б) коррекция погрешностей ЦАП
При аналоговой коррекции (рис.17.б) кроме основного ЦАП используется еще один дополнительный ЦАП. Диапазон его выходного сигнала соответствует максимальной величине погрешности корректируемого ЦАП. Входной код одновременно поступает на входы корректируемого ЦАП и на адресные входы ЗУ поправок. Из ЗУ поправок выбирается соответствующая данному значению входного кода поправка. Код поправки преобразуется в пропорциональный ему сигнал, который суммируется с выходным сигналом корректируемого ЦАП. Ввиду малости требуемого диапазона выходного сигнала дополнительного ЦАП по сравнению с диапазоном выходного сигнала корректируемого ЦАП собственными погрешностями первого пренебрегают.
В ряде случаев возникает необходимость проведения коррекции динамики работы ЦАП.
Переходная характеристика ЦАП при смене различных кодовых комбинаций будет различной, иными словами – различным будет время установления выходного сигнала. Поэтому при использовании ЦАП необходимо учитывать максимальное время установления. Однако в ряде случаев удается корректировать поведение передаточной характеристики.
Зададимся временем преобразования меньшим максимального времени установления. Если удастся идентифицировать динамические параметры ЦАП можно рассчитать такие поправки к входному коду ЦАП, при которых выходное значение за это заданное время будет достигать необходимого значения. В этот момент необходимо фиксировать результат преобразования последующих за ЦАП узлов системы, так как после этого момента выходной сигнал ЦАП будет продолжать изменяться, причем выходить на уровень соответствующий не входному коду, а его скорректированного значения.

