 2015-07-14
2015-07-14 866
866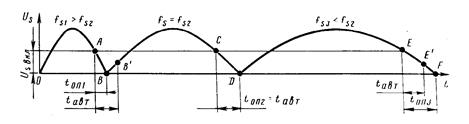
Рисунок 25.2 – График напряжения огибающей автоматического синхронизатора с постоянным углом включения
Автоматические синхронизаторы с постоянным углом включения выдают сигнал на включение генераторного автомата при уменьшении угла сдвига фаз одноименных векторов фазных напряжений до значения φ ≤ 10º. В этих синхронизаторах напряжение огибающей Us сравнивается с некоторым постоянным напряжением Us.вкл и при выполнении условия Us.вкл ≥ Us выдает сигнал на включение генераторного автомата.
В этих синхронизаторах сигнал на включение генераторного автомата выдаются в точках А, С, Е и время опережения выдачи сигнала зависит от частоты скольжения. Только при одной частоте fs2 время опережения равно собственному времени включения генераторного автомата. При частоте fs1 сигнал на включение автомата будет выдан в точке А, а сам автомат включится с некоторым запаздыванием в т. В’. При частоте fs3 автомат включится с некоторым опережением.
Блок синхроизации генераторов типа БСГ.
Блок БСГ входит в состав СУ СЭЭС «Ижора-М» и предназначен для включения СГ на параллельную работу методом точной синхронизации с предварительной автоматической подгонкой частоты подключаемого генератора к частоте сети.
Блок выдает сигнал на включение автомата при:
– разности напряжений DU ≤ 0,12 Uном;
– разности частот 0,2 Гц ≤ Df ≤ 0,6Гц;
– угле сдвига фаз φ ≤10º.
Элементной базой блока являются микросхемы, которые включают в себя логические элементы, генераторы импульсов, счетчики, дешифраторы, триггеры и т.д.
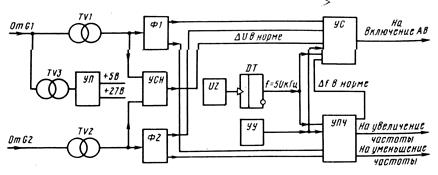
Рисунок 25.3 – Функциональная схема блока синхронизации БСГ
Напряжение работающего генератора G1 подается на трансформаторы TV1 и TV3, а подключаемого генератора на TV2. Напряжение с TV3 подается на узел питания УП. С выходов трансформаторов TV1 и TV2 напряжение поступает на вход узла УСН сравнения напряжений и входы формирователей Ф1 и Ф2.
При DU > 0,12 Uном с выхода узла УСН поступает запрет на синхронизацию в виде логического нуля.
Формирователи Ф1 и Ф2 предназначены для получения импульсов двух видов: коротких с продолжительностью, равной половине периода напряжения генератора. Длинные импульсы поступают на вход узла синхронизации УС, а короткие на узел подгонки частоты УПЧ.
Квантовый генератор UZ вырабатывает импульсы стабильной частоты 100 кГц, которые после триггера DТ, выполняющего роль делителя частоты, с частотой 50 кГц поступают на УС и УПЧ. Узел уставки УУ устанавливает все триггеры БСГ в исходное состояние при включении блока.
УПЧ вырабатывает сигналы на увеличение или уменьшение частоты подключаемого генератора, а при допустимой разнице частот выдает логическую единицу, поступающую на вход узла УС. УС выдает сигнал на включение автомата генератора при условии, что DU, Df, φ находятся в установленных пределах, Для повышения надежности используются два блока БСГ, выходы которых включаются последовательно (схема совпадений).
Рисунок 25.4 – Структурная схема автоматической синхронизации на базе БСГ
На рисунке 25.4 изображена структурная схема автоматической синхронизации на базе БСГ. Из схемы видно, что на вход автоматического синхронизатора подается напряжение сети и напряжение генератора. С выхода АС сигнал подается на серводвигатель рейки топливного насоса для подгонки частоты, а другой сигнал на включающий электромагнит генераторного автомата.
5 Розширення мови СИ необхідні при написанні програмного забезпечення мікропроцесорних управляючих систем.
Поскольку компилятор С51 генерирует объектный код для конкретного микроконтроллера, в язык введены соответствующие расширения стандарта
ANSI. Эти расширения включают:
- области памяти;
- типы памяти;
- модели памяти;
- типы данных;
- регистры специальных функций;
- указатели;
- атрибуты функций.
Нужно различать следующие типы памяти:
§ bdata - только для бит-адресуемых объектов (размещаются в бит-адресуемой области внутренней памяти данных);
§ code — для констант и функций (размещаются в памяти программ);
§ data - только для переменных (размещаются во внутренней памяти данных в области адресов 00H...7FH);
§ far - для переменных и констант (размещаются во внешней расширенной памяти - актуально только для микроконтроллеров с объемом внешней памяти более 64 Кбайт; предполагается 24-битный адрес, т. е. доступ с помощью 3-байтного общего указателя);
§ idata - только для переменных (размещаются во внутренней памяти данных
после типа data);
§ pdata - только для переменных (размещаются во внешней памяти данных;
предполагается 8-битный адрес внутри одной страницы размером 256 байт);
§ xdata - только для переменных (размещаются во внешней памяти данных;
предполагается 16-битный адрес внутри области размером 64 Кбайта).
Кроме стандартных необходимо поддерживать следующие типы данных:
- sbit - бит регистра специальных функции;
- sfr – 8-6итный регистр специальных функции;
- sfr 16 - 16-битный регистр специальных функций.
В дополнение к стандартным возможностям языка Си компилятор позволяет использовать ряд расширении при декларации функций:
• объявить функцию как подпрограмму обработки прерывания;
• выбрать определенный банк регистров для функции;
• выбрать модель памяти;
• декларировать реентрантную функцию.
.практычне
1 Електродвигун постійного струму паралельного збудження має такі номінальні дані: напруга U = 220 В, проти-ЕРС Е = 210 В, опір обмотки якоря Rа = 1 Ом. Розрахувати струм якоря при аварійному обриві обмотки збудження і порівняти його з номінальним струмом.
2 Авторульовий типу АИСТ. Автоматичне управління.
А в т о м а т и ч е с к и й вид управления позволяет обеспечить автома- тическое удержание судна на заданном курсе и осуществляется следующим об- разом. Отклонение судна от заданного курса фиксируется гирокомпасом, кото- рый через сельсин – датчик разворачивает роторы сельсинов Сс1 и Сс5 в ПУ (рис.3.1). Сельсин Сс1 при этом развернет шкалу грубого и точного отсчета курса. Сельсин Сс5 через механический дифференциал развернет ротор сель- сина Сс3 и связанный с ним подвижный индекс. Переменное напряжение И1 с выходной обмотки сельсина Сс3 пропорциональное углу отклонения судна от курса, поступает на вход блока коррекции и затем в суммирующую схему. Блок коррекции вырабатывает сигналы И2 и И3, пропорциональные первой произ водной от угла изменения курса и интегралу от угла изменения курса. На входе усилителя появится напряжение, равное сумме вышеуказанных сигналов. Уси- ленный по напряжению и мощности сигнал с выхода усилителя поступает на управляющую обмотку двигателя в исполнительном механизме (ИМ), который начинает смещать управляющий орган насоса из нулевого положения, и руль будет перекладываться в таком направлении, чтобы судно возвращалось на за- данный курс. При перекладке руля с выходных обмоток сельсинов Сс1 в ИМ и Сс3 в рулевом датчике (РД) будут сниматься напряжения И4 и И5, пропор- циональные углу отклонения валика насоса и углу отклонения пера руля. Эти напряжения с обратным знаком будут подаваться на сумматор, т.е. суммарное напряжение на входе усилителя будет: И = И1 + И2 + И3 – И4 – И5. Через некоторый момент времени, когда напряжение на входе усилителя станет равным нулю, т.е. когда будет выполнено равенство И1 + И2 + И3 =И4, а И5 = 0, перекладка руля прекратиться и под действием момента, создаваемого переложенным рулем, судно прекратит отклонение от курса и начнет возвра- щаться на курс. Гирокомпас через сельсин-датчик будет разворачивать роторы сельсинов Сс1 и Сс5 в обратном направлении. Сельсин Сс5 через механиче- скую передачу начнет также разворачивать ротор Сс3 в обратном направле- нии. При этом напряжение сигнала производной И2 в блоке коррекции (БК) изменит свою фазу и это приведет к тому, что руль придет в диаметральную плоскость раньше, чем оно возвратится на заданный курс и будет переклады- ваться на другой борт, чтобы воспрепятствовать перекатку судна через линию заданного курса, т.е. произойдет "одерживание" судна. Для различных условий плавания и в зависимости от гидродинамических свойств судна, при одном и том же угле отклонения судна от курса, требуется различная величина угла перекладки руля для возвращения судна на заданный курс. Эта регулировка осуществляется с помощью регулятора коэффициента обратной связи (КОС) и производится путем изменения напряжения возбужде- ния сельсина Сс3 в рулевом датчике. Различное напряжение возбуждения снимается с трансформатора Тр5 через регулятор КОС. Автоматический вид управления используется в открытом море, при хо- рошей видимости и при отсутствии близкорасположенных навигационных опасностей
Билет 9








