 2014-01-31
2014-01-31 1246
1246Режим технологического обслуживания и др.
Уровни ресурсосбережения располагают в такой логической последовательности, чтобы экономия ресурсов на каждом данном уровне дополняла результаты экономии ресурсов, полученные на предшествующих уровнях.
Таким образом, происходит сложение эффектов ресурсосбережения всех уровней.
Критериями оценки ресурсосбережения могут служить такие показатели, как
- удельная энергоемкость технологического процесса с законченным циклом производства,
-удельная металлоемкость,
-финансовые, трудовые, сырьевые затраты (потери) на единицу продукции.
Условия эксплуатации машин в лесном хозяйстве существенно отличаются от условий сельскохозяйственного производства и тем более от условий применения машинного оборудования в промышленности. Это необходимо учитывать как при разработке и создании машин, так и при организации эксплуатации машинной техники в производственных условиях.
Лесохозяйственное производство — специфическая отрасль народного хозяйства, имеющая свои особенности, которые существенно сказываются на использовании техники при проведении лесовосстановительных, лесоводственных, лесозащитных, гидромелиоративных, противопожарных и других мероприятий.
Главными особенностями являются следующие моменты:
1. Большие площади и протяженность территории лесохозяйственных предприятий, превышающие в десятки раз площади сельскохозяйственных производств, с большим разнообразием лесного фонда и слабой обеспеченностью дорожной сетью создает дополнительные сложности при организации эксплуатации МТП.
2. Объектами применения техники, как правило, являются площади различной величины (в основном от 0,1 до 10,0 га), на которых обрабатываемым материалом являются поверхностный слой почвы с травянистой растительностью, пнями и другими препятствиями, а также деревья различного возраста и размеров.
3. В связи с многолетним биологическим циклом выращивания леса, особенностями ведения лесного хозяйства и невозможности непрерывного выполнения всех операций технологического процесса с законченным циклом производства на объекте за один
заход техники создается большая пространственная разобщенность участков работ с расстоянием между ними от 0,5 до 5,0 км и более. В результате этого возникают частые переезды, перебазировки техники с участка на участок, потеря времени на перегоны и снижение наработки на механизмы.
4. Производственные процессы и технологические операции имеют сезонность и в основном выполняются в определенные агролесотехнические сроки от (3 до 25 и более дней). Поэтому при использовании многих машин в течение года возникает пиковая потребность в них, ограниченная агросроками, и невостребованность в остальное время со всеми вытекающими из этого последствиями.
5.  Производственные процессы осуществляются в основном в незащищенном от атмосферного воздействия и метеоусловий пространстве, что оказывает непосредственное влияние на технологический процесс и эксплуатацию техники.
Производственные процессы осуществляются в основном в незащищенном от атмосферного воздействия и метеоусловий пространстве, что оказывает непосредственное влияние на технологический процесс и эксплуатацию техники.
6. Обрабатываемые лесохозяйственными машинами материалы (почва, растения и др.) подвержены изменениям под влиянием биологических процессов и вследствие изменчивости метеорологических и почвенных условий. Это оказывает непосредственное влияние на энергоемкость машин, изменение сроков и качества работ и другие показатели.
7. Продолжительность различных технологических процессов с завершенным циклом производства в лесном хозяйстве не одинаковая и составляет от нескольких дней до десятка лет. Она нередко сопровождается технологическими паузами-перерывами по
лесотехническим требованиям, что необходимо учитывать при организации использования техники.
8. Большинство технологических процессов многооперационные, т. е. состоят из отличающихся между собой технологических операций, выполняющих различные по содержанию и времени функции общего процесса. Это требует обеспечения взаимоувязанной работы различных машин при выполнении всех операций.
Эффективное использование машинной техники зависит не только от умелого выбора машин и комплектования МТА с оптимизацией режима их работы, но и от того, насколько правильно организовано выполнение каждой операции, включая подготовку рабочих участков для работы, а также от обоснования ресурсосберегающего способа движения агрегатов и др.
Машинно-тракторные агрегаты в процессе работы перемещаются по рабочему участку (полю, вырубке и другим категориям площадей), проходя за смену расстояния в десятки километров. При этом пройденный МТА путь состоит из рабочих и холостых (на поворотах) ходов с выключенными рабочими органами. Необходимо стремиться к тому, чтобы холостой путь МТА и друга потери времени смены были как можно меньше. Это позволяет сэкономить топливо и повысить производительность.
Способ движения МТА — это закономерная последовательность его перемещения по полю в процессе работы с циклично повторяющимися элементами: формой траектории с рабочими и холостыми ходами, видами и радиусами поворотов и др.
Кинематика МТА изучает способы движения мобильных агрегатов с рабочими и холостыми ходами при выполнении технологических операций на участках работ.
Кинематика (от гр. kinematos — движение) — раздел механики изучающий геометрические свойства движения тел, условно принимаемых за точку, без учета их массы. При обосновании способов движения МТА, а также элементов подготовки участков к работе (ширины поворотных полос, загонов и др.) учитываются следующие показатели кинематической характеристики МТА: кинематический центр, кинематическая длина, длина выезда агрегата, радиус и центр поворота, ширины агрегата и др.
Значения этих показателей зависят от конструктивных особенностей трактора, рабочих машин, сцепки, состава и особенностей комплектования агрегата.
Кинематическим центром агрегата называется условная геометрическая точка Ц (рис. 15.1), траектория которой на плоскости движения (поверхности участка) имитирует траекторию движения МТА на поворотах и при выполнении рабочих ходов. Точка Ц для МТА с колесными тракторами с жесткой рамой определяется как проекция средины задней ведущей оси на плоскость движения. Для МТА с тракторами, имеющими шарнирно-сочлененную раму, за кинематический центр принимается проекция на плоскость движения центра шарнира рамы. У МТА с гусеничными тракторами проекция точки Ц на плоскость движения соответствует точке пересечения диагоналей, проведенных через наружные края гусениц.
Кинематической длиной агрегата /к называется проекция расстояния от кинематического центра агрегата Ц до точки пересечения линии, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА окончания рабочих органов машин при прямолинейном движении. Кинематическая длина агрегата состоит из кинематических длин трактора, сцепки и рабочих машин.
Длиной выезда агрегата l называется расстояние, на котором перемещается центр агрегата Ц от контрольной линии (границы обрабатываемого участка) перед началом и в конце поворота по ходу МТА. Длина выезда агрегата, как правило, превышает кинематическую длину агрегата, так как необходимо дополнительной расстояние для вывода или ввода рабочих органов машины в режим холостого или рабочего хода:
l > l к или l = е + l к,
где е — дополнительный путь для вывода рабочих органов при выезде в режим холостого хода и для их ввода при въезде в режим рабочего хода.
Радиусом поворота агрегата R называется расстояние от кинематического центра агрегата Ц до центра поворота на плоскости движения. Обычно центр агрегата при повороте МТА перемещается по дуге более сложной формы и изменяется как значение радиуса поворота, так и расположение центра поворота. В эксплуатационных расчетах принимают среднее значение радиуса поворота, допуская введение поправки на скорость МТА при повороте шириной агрегата В называется расстояние между наиболее удаленными внешними точками по ширине при прямолинейном движении агрегата.
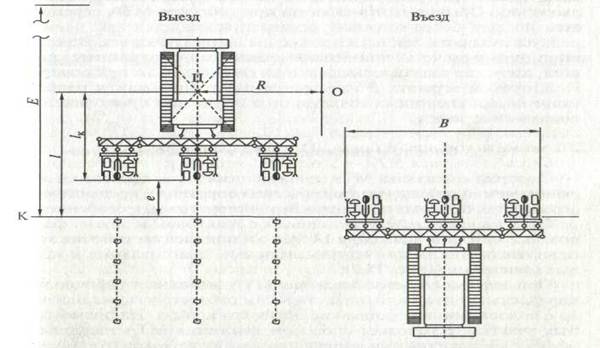
Основные элементы кинематической характеристики мобильного агрегата и рабочего участка:
Ц — кинематический центр агрегата; О — центр поворота; R — радиус поворота; /к — кинематическая длина агрегата; е — дополнительный путь для вывода рабочих органов при выезде в режим холостого хода и для их ввода при въезде в режим рабочего хода; / — длина выезда агрегата; В — ширина агрегата; К — контрольная линия; Е — ширина поворотной полосы
Способы движения МТА и виды поворотов зависят от выполняемой работы, предъявляемых агролесотехнических требований, конструктивных особенностей рабочих машин, систем соединения с трактором и других факторов. Все способы движения МТА по направлению рабочих ходов подразделяются на три группы: гоновые, диагональные и круговые.
При гоновых способах движения МТА выполняет рабочие ход параллельно одной или двум сторонам рабочего участка или загона с холостыми поворотами на обоих его концах. На прямоугольных участках с гоновым способом движения МТА наибольший эффект достигается при направлении рабочих ходов агрегата по длинной стороне загона, та как в таких случаях уменьшается число поворотов.
Способы движения вразвал, всвал, чередование по загонам являются основными при сплошной вспашке лемешными многокорпусными плугами при обработке почвы в лесных питомниках, защитном лесоразведении и приравненных к ним условиях.
Основное преимущество способа чередования по загонам с согласованной обработкой трех загонов состоит в уменьшении почти в два раза числа свальных гребней и развальных борозд по сравнению с движением только всвал или вразвал.
Комбинированный способ движения с беспетлевыми поворотами позволяет уменьшить величину поворотных полос, повысить качество вспашки, уменьшить число развальных борозд. Этот способ применяется при частичной широкополосной обработке почвы для производства лесных культур, при защитном лесоразведении и в условиях, где нежелательны петлевые повороты.
Ч е л н о ч н ы й способ движения наиболее эффективен для простых одномашинных высокоманевренных МТА при выполнении таких операций, как частичная обработка почвы на вырубках, гладкая вспашка оборотными плугами на небольших участках лесных питомников, при применении посевных, лесопосадочных агрегатов и др.
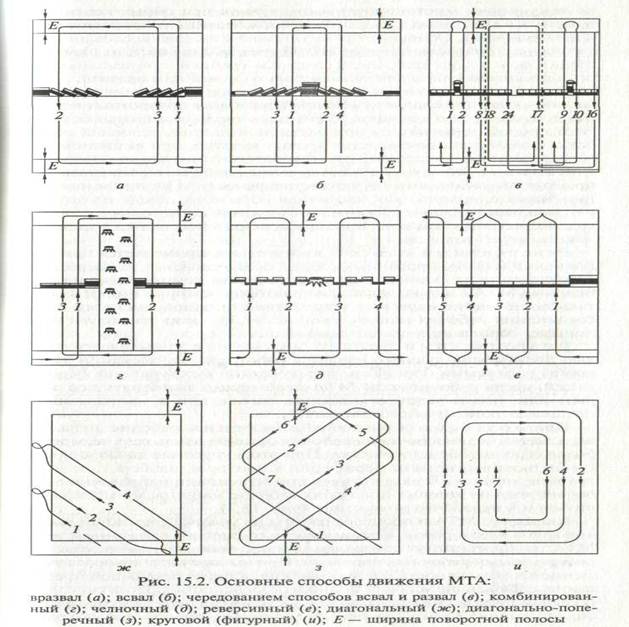 |
Р е в е р с и в н ы й способ движения применяется при выполнении механизированных работ в особо сложных условиях (лесоразведение на склонах и др.) при условии комплектования мобильных МТА с использованием тракторов, которые имеют фронтальные и задние навесные устройства для одновременного присоединения рабочих машин, таких как плуги челночные, горные лесопосадочные машины и др.
Д и а г о н а л ь н ы й способ д в и ж е н и я применяется с целью достижения лучшего качества работ при бороновании зубовыми, дисковыми боронами, перекрестной междурядной культивации, когда рабочие ходы МТА необходимо выполнять под острым или тупым углом к сторонам загона или к направлению, предшествующему обработке почвы.
П р и к р у г о в о м способе движения рабочие ходы совершаются без выключения рабочих органов вдоль всех четырех и более сторон рабочего участка. При этом круговые движения могут быть направлены от периферии к центру и, наоборот, от центра к периферии. В ряде случаев при изменении направления рабочего хода на угловых поворотах рабочие машины могут переводиться и в нерабочее положение.
Движение МТА в процессе работы на участке состоит из рабочих ходов и поворотов. В зависимости от способа движения и типа МТА повороты могут совершаться как с выключенными, так и с включенными рабочими органами. При выборе вида поворота учитываются возможность его исполнения, а также следующие требования: соблюдение условий техники безопасности; достижение наибольшей производительности МТА и наименьшего расхода топлива, оставление возможно меньшей ширины поворотной полосы.
Все основные виды поворотов, наиболее широко применяемые на практике, подразделяются на три группы: беспетлевые, петлевые, игольчатые.
Основное условие возможности выполнения беспетлевых поворотов — расстояние х между серединами двух смежных проходов МТА должно быть больше двух радиусов R поворота, т.е. x>2R.
Группу петлевых поворотов составляют более 20 видов поворотов, из которых наиболее часто применяются грушевидные, восьмеркообразные, односторонние, с закрытой петлей, а также только для навесных агрегатов — грибовидные с открытой петлей, грибовидные с закрытой петлей, с угловой петлей и др.
Игольчатые повороты применяются при реверсивном способе движения МТА с фронтальной и задней навеской рабочих машин.
Виды поворота оказывают непосредственное влияние на экономические показатели работы МТА и размер поворотного поле на рабочем участке. Холостые заезды при гоновом способе производятся на поворотных полосах, на концах гонов.
Выбранный способ движения агрегатов должен обеспечивать выполнение агротехнических требований и наименьшую протяжённость холостых ходов.
При проведении работ на не раскорчёванных вырубках, на раскорчеванных полосах и при посадке, посеве на сплошь обработанных участках чаще применяется челночный способ движения агрегатов. В этом случае рабочие ходы располагаются рядом и каждый ход имеет направление, противоположное соседнему.
При сплошной обработке участков применяют способы движения всвал (движение начинается от центра загона), вразвал (движение начинается с правой стороны участка и переходит на левую сторону) и комбинированный способ движения. Оптимальная ширина загона Coпт (м), при которой обеспечивается наименьшая протяжённость холостого хода (способы движения всвал и вразвал), рассчитывается по формуле:

где L - длина гона, м;
В - ширина захвата агрегата, м;
R - минимальный радиус поворота, м.
Способ поворота агрегата в значительной степени определяется способом движения агрегата, и при некоторых способах (всвал, вразвал) в процессе работы изменяется в соответствии с изменением расстояния между двумя заездами.
Ширина поворотной полосы Е (м) при беспетлевом способе движения и при повороте со срезанной петлёй (грибовидный поворот) рассчитывается по формуле: Е= е + R + 0.5 В
где е - длина выезда агрегата (расстояние от центра агрегата до самых крайних рабочих органов машины), м.
Длина выезда агрегата е (м) характеризует длину, на которую необходимо отвести центр агрегата для выведения рабочих органов машины на контрольную линию.
Она рассчитывается по формуле е = /т+ / м
где /т - кинематическая длина трактора, м;
1м – кинематическая (габаритная) длина машины, м;
R – наименьший радиус поворота,;
При подготовке лесных участков к работе для выполнения лесохозяйственных операций определяются следующие элементы его кинематической характеристики: общая и рабочая длин гона, ширина загона, ширина обрабатываемых полос, число последовательность обработки загонов и полос, ширина поворотных полос, положение контрольной линии и длины выезда МТА.
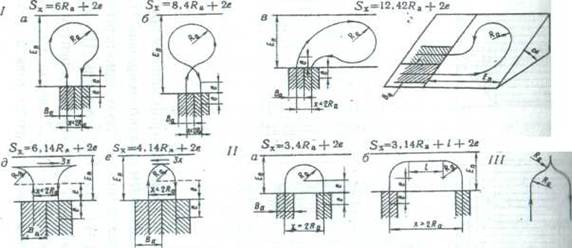 |
Виды поворотов машинно-тракторных агрегатов
I - петлевые на 180°: а - грушевидный; б - восьмеркообразныч грушевидный с выездом в сторону при малой ширине поворот полосы; г - грушевидный при работе на склонах; д - грибовидный с навесной машиной и удлиненным задним ходом; с - грибовидный с навесной машиной и укороченным задним ходом;
II - беспетлевые на 180°: а - по окружности; б - по дуге и с пробегом и поворотной полосы;
III - игольчатые (реверсивные); Ra - рп поворота агрегата; Еп - ширина поворотной полосы; е – длина въезда и въезда агрегата; X - расстояние между серединами смежных проходов агрегата; Ва - ширина захвата агрегата; а - длина склона; 3.x. - движение задним ходом; 1 - длина пробега; Sx - л холостого поворота
Рабочим участком является общая площадь, большая часть которой подлежит непосредственной обработке, а меньшая часть используется в виде поворотных полос Е.
Общая длина участка определяется его размерами, а длина рабочего гона Lp ограничивается площадью обработки и составляет: Lp= L - 2E.
Рабочую длину гона мобильный МТА проходит в режиме рабочего хода, т. е. с включенными в работу рабочими органами машины.
Поворотные полосы предназначены для осуществления вспомогательной технологической функции, а именно холостых поворотов МТА с выключенными рабочими органами машин. Ширина поворотной полосы зависит от состава МТА, определяющего радиус поворота R и длину выезда агрегата /, ширины агрегата В и условий безопасного поворота МТА.
В практических расчетах радиус поворота принимается:
-для прицепных агрегатов с зубовыми боронами со сцепкой — равным ширине агрегата; -с культиваторами, сеялками — от 0,7...0,8 ширины МТА, в зависимости от числа машин.
Для МТА с навесными рабочими машинами наименьший радиус поворота может быть принят равным конструктивному радиусу поворота трактора. При определении длины выезда агрегата /, состоящего из колесного трактора и навешанных сзади рабочих машин, а также агрегатов с большим радиусом поворота принимают е = 0,1/к.
Для агрегатов с прицепными машинами е = 0,5...0,75/к.
В условиях лесовосстановления, лесовыращивания поворотные полосы длительное время (10...15 лет) практически остаются малопродуцирующими. В связи с растянутостью по времени проводимых технологических операций, начиная с обработки почвы для производства лесных культур и заканчивая проведением осветлений по формированию нужного состава древостоя, поворотные полосы продолжают выполнять свою основную функцию.
На рабочем участке обычно обозначаются контрольными линиями две поворотные полосы — в начале и конце рабочих ходов МТА. В конце рабочего хода Lp при выезде трактора на поворотную полосу Е, продолжающего прямолинейное движение, перевод рабочих органов в нерабочее положение производится, когда рабочие органы машины последнего ряда достигнут контрольной линии, а поворот МТА начинается с момента выхода рабочих органов из почвы в нерабочее положение. По окончании поворота перед началом очередного рабочего хода рабочие органы переводятся в рабочее положение до подхода их первого ряда к контрольной линии, т.е. перевод рабочих органов машины в нерабочее положение и возвращение в рабочее положение осуществляются в зоне поворотной полосы Е.
Загоном называется часть рабочего участка. Длина загона равна общей длине участка. Деление рабочего участка на загоны производится по ширине участка с целью улучшения организации выполнения работ и сокращения общей длины холостых ходов МТА па поворотных полосах.
Подготовка участка к выполнению технологических операций предусматривает решение ряда вопросов в следующей последовательности.
1. Уточнение конфигурации и размеров участка с составлением абриса. Определяются условия работы: рельеф и состояние поверхности участка, тип и удельное сопротивление почвы и др.
2. Обоснование направления движения МТА на участке.
Обычно направление движения принимается по длинной стороне гона.
Необходимо учитывать, что при коротких гонах увеличиваются холостые пробеги из-за лишних поворотов, а при очень длинных гонах (более 1000 м) усложняется обслуживание МТА при посадке, посеве леса.
3. Оптимизация способа движения МТА на участке с учетом соблюдения агролесотехнических требований и технических возможностей машин.
4. Обоснование вида поворотов при выполнении работы на участке, учитывая условия их выполнения, технические возможности, цикличность движения МТА и др.
5. Целесообразность деления участка на загоны с учетом его размеров и конфигурации, способов движения и сменной производительности МТА.
Оптимальная ширина загона В3, м, определяется по выше приведенной формуле:
6.Определение мест заправки МТА посадочным материалом, семенами и т.д.
7. Определение оценочных показателей кинематики МТА на участке.
При проведении других лесохозяйственных мероприятий в подготовку участков для работы могут быть включены и другие виды работ исходя из требований системы машин и технологического процесса.

