 2014-01-31
2014-01-31 1095
1095Рис. 4
Рис. 4
где j – действительный угол поворота зубчатого колеса;
Z – число зубьев зубчатого колеса;
k × 2p/Z – номинальный угол поворота колеса (k ³ 2 – число целых угловых шагов);
r – радиус делительной окружности колеса.
1.4. Накопленная погрешность шага зубчатого колеса Fpr – наибольшая алгебраическая разность значений накопленных погрешностей в пределах зубчатого колеса
F´ pr < F´ir на 15-20%
 Fк.п.к.
Fк.п.к.


 к
к
 |



 Fpr
Fpr










 Fpkr
Fpkr
шаг
jполн.
1.5. Радиальное биение зубчатого венца Frr – разность действительных предельных положений исходного контура в пределах зубчатого колеса (от его рабочей оси).
Практически Frr определяется разностью расстояний от рабочей оси колеса до постоянных хорд  зубьев. Радиальное биение зубчатого венца вызвано неточным совмещением рабочей оси колеса с технологической осью при обработке зубьев, а также радиальным биением делительного колеса станка.
зубьев. Радиальное биение зубчатого венца вызвано неточным совмещением рабочей оси колеса с технологической осью при обработке зубьев, а также радиальным биением делительного колеса станка.
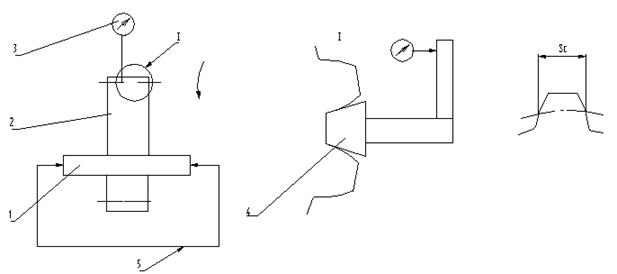
Рис. 5. Схема замера Frr
1 – оправка; 2 – зубчатое колесо; 3 – измерительное устройство; 4 – наконечник по профилю впадины зуба, обеспечивающий касание по делительной окружности; 5 – центра.
1.6. Колебания длины общей нормали.
Длиной общей нормали зубчатого колеса W – называется расстояние между двумя параллельными плоскостями, касательными к двум разноименным активным боковым поверхностям А и В зубьев колеса.
Рис. 6
АВ – касательная к делительной окружности.

Колебанием длины общей нормали Fwr называется разность между наибольшей и наименьшей действительными длинами общей нормали в одном и том же зубчатом колесе
Fvwr = Wнаиб. – Wнаим.
(вызывается погрешностью обката станка)
Измеряется с помощью нормалемеров.
Номинальным измерительным межосевым расстоянием а¢¢ называют расчетное значение расстояния между осями измерительного и проверяемого колеса, имеющего наименьшее дополнительное смещение исходного контура. При этом сопряжении зубья колес находятся в плотном двухпрофильном зацеплении. Разность между наибольшим и наименьшим действительными межосевыми расстояниями при двухпрофильном зацеплении измерительного зубчатого колеса с контролируемыми при повороте последнего на полный оборот или на 1 угловой шаг называется колебанием измерительного межосевого расстояния за оборот колеса F¢¢ir или колебанием измерительного расстояния на одном зубе f´΄ir
(΄΄ -двухпрофильное зацепление)
Допуски: F¢¢i; f´΄i Fir´´ = a´´max - a´´min
F¢¢ir – определяется теми же факторами, что и кинематическая погрешность зубчатого колеса (за исключением погрешности обката), складывается из радиальных биений зубчатых колес: F¢¢i = 1,4Fr, т.к. 

Рис. 7
Измеряется с помощью межцентромера (рис. 7). Колеса подводятся в соприкосновение (осуществляется двухпрофильное ¢¢ беззазорное зацепление), ИЧ – выставляется на «0». Затем эталонное колесо поворачивается, контролируемое поворачивается и сдвигается в осевом направлении, что регистрируется ИЧ.
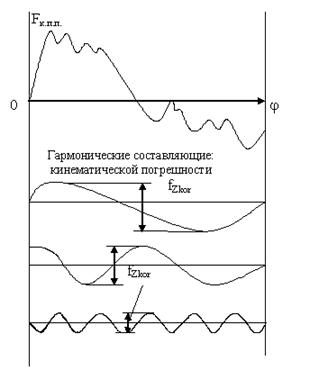
2. Плавность работы передачи - эта характеристика передачи определяется параметрами, погрешности которых многократно (циклически) проявляются за оборот зубчатого колеса и так же составляют часть кинематической погрешности.
2.1. Под циклической погрешностью передачи fZkor и зубчатого колеса fZkr понимают удвоенную амплитуду гармонической составляющей кинематической погрешности.
 Для ограничения циклической погрешности назначают допуски:
Для ограничения циклической погрешности назначают допуски:
fZko – для передачи;
fZk – для колеса;
fZko = fZk = (Кц-0,6 + 0,13) Fr,
где Кц – частота циклов за один оборот зубчатого колеса, Fr – допуск на биение той же степени точности.
 Для ограничения циклической погрешности с частотой повторения равной частоте входа зубьев в зацепление fZor и fZZr установлены допуски на циклическую погрешность зубцовой частоты в передаче fZor и fZZ
Для ограничения циклической погрешности с частотой повторения равной частоте входа зубьев в зацепление fZor и fZZr установлены допуски на циклическую погрешность зубцовой частоты в передаче fZor и fZZ
fZZ = 0,6 fZZo (Кц = Z)
fZZ, fZZo зависят от Кц, степени точности, коэффициента осевого перекрытия eo, модуля m.
угол осевого перекрытия jв
 eo - для косозубой передачи =
eo - для косозубой передачи =
угловой шаг
Показателями плавности работы являются местные кинематические погрешности передачи и колеса.
2.2. Местные кинематические погрешности передачи и колеса f¢ior; f¢ir
Определяются наибольшей разностью между местными соседними экстремальными значениями кинематической погрешности передачи (колеса) за полный цикл вращения колес передачи или в пределах колеса jполн.
 Fк.п.к.
Fк.п.к.
f ¢ir







 |
φ
jполн
Допуски f ¢io; f ¢i
f ¢i = ½ f Pt ½ + ff, где ± f Pt – допуск на шаг (угловой) Pt
± fpв – допуск на шаг зацепления (основной) Pв
ff - допуск на погрешность профиля зубьев.
2.3. Под отклонением шага f Ptr – понимают кинематическую погрешность зубчатого колеса при его повороте на один номинальный угловой шаг (рис. 10а)
2.4. Отклонение шага зацепления fPвr – разность между действительным Рвд и номинальным Рвн шагами зацепления (рис. 10б).
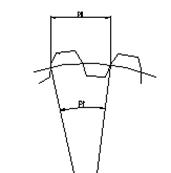
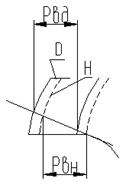
Рис.10а Рис. 10б
Действительный шаг зацепления Рвд равен кратчайшему расстоянию между двумя параллельными плоскостями, касательными к двум одноименным активным боковым поверхностям соседних зубьев колеса. Его определяют в сечении, перпендикулярном к направлению зубьев в плоскости, касательной к основному цилиндру.
| ½ fpв½ = ½ f rt½ cos a = 0,94 f Pt |
2.5. Погрешность профиля зуба ffr вызывает неравномерность движения, дополнительные нагрузки, уменьшение поверхности контакта (допуск ff).
 |
Рис. 11.

