 2020-01-14
2020-01-14 362
362
Схема нагружения "жесткого рычага" – повернутого на 90° плана скоростей механизма показана на рис. 16 и чертеже курсовой работы. При этом моменты разложены на пары сил; составляющие пар сил определяются по выражениям:
 ,
,
где МИ и МУР – момент сил инерции и уравновешивающий момент (Нм); l – длина звена (м).
Для данного механизма имеем:
 ;
;
 .
.
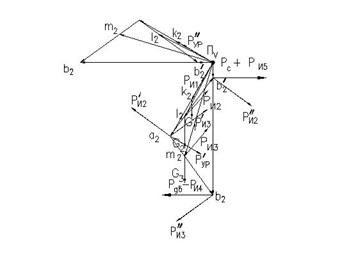
Рис. 16. Схема нагружения "жесткого рычага" Жуковского
Условие равновесия "жесткого рычага" Жуковского:
 , или
, или
Силы G4 и G5 на рис.16 не показаны (приложены в (·) b2 и b'2, направлены вертикально вниз).
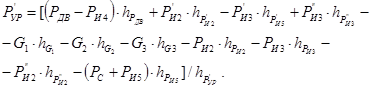
Тогда
Плечи сил, снятые с чертежа:
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;  .
.
Такая точность измерения плечей возможна при выполнении чертежа в какой-либо автоматизированной системе, например, в системе AutoCAD (см. чертеж курсовой работы).
Подставляя числовые значения сил, получим
P'УР = [(5500 – 742,82)·79,56 + 352,3·50,96 - 352,3·20,79 + 352,3·64,31 – 264,6·12,81 – 196·17,09 –196·17,09 – 2892·8,87 – 2836,2·23,21 – 352,3·7,44 –(4200 + 850,94)·9,21] / 51,25 = 5093,8 Н.
|
|
|
Уравновешивающий момент
 .
.
Определив значение уравновешивающего момента по методу "жесткого рычага" Жуковского, следует найти расхождение в значениях уравновешивающего момента, полученных по методу кинетостатики и по "рычагу" Жуковского:
 %.
%.
В нашем случае большее значение уравновешивающего момента Мур = 63,12 Н·м получено по "рычагу" Жуковского, меньшее Мур = 62,5 Н·м – по методу кинетостатики. Погрешность расчета равна:
 .
.
Силовой расчет механизма выполнен правильно, т.к. погрешность  .
.
Список использованных источников
1. Егорова В.И., Вороковская А.П. Теория механизмов и машин. Структура, кинематика и динамика шарнирно-рычажных механизмов: Учебное пособие. Л.: Изд. ЛКИ, 1981.
2. Яковлев В.П., Половинкина Н.Б. Практикум по теории механизмов и машин. Ч. 1.: Методические указания. Л.: Изд. ЛКИ, 1983.
3. Конспекты лекций и практических занятий.








