 2020-01-14
2020-01-14 258
258
Для определения скоростей звеньев механизма продифференцируем по времени систему уравнений (1.4. Учитывая, что  и, перенося слагаемые с неизвестными скоростями в одну сторону, получим
и, перенося слагаемые с неизвестными скоростями в одну сторону, получим
 (1.11)
(1.11)
Данная система уравнений является системой линейных алгебраических уравнений относительно неизвестных скоростей звеньев. Представим эту систему уравнений в матричной форме
 (1.12)
(1.12)
Где
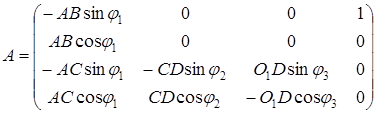 - матрица коэффициентов левых частей уравнений
- матрица коэффициентов левых частей уравнений
 - вектор неизвестных скоростей звеньев
- вектор неизвестных скоростей звеньев
 - вектор правых частей уравнений.
- вектор правых частей уравнений.
Решение уравнений (1.12) будет иметь вид
 (1.13)
(1.13)
Для определения ускорений звеньев механизма продифференцируем по времени систему уравнений (1.11).Учитывая, что  ,
,  ,
,  ,
,  и, перенося слагаемые с неизвестными ускорениями в одну сторону, получим
и, перенося слагаемые с неизвестными ускорениями в одну сторону, получим

Или в матричной форме
 (1.14)
(1.14)
Где
 - вектор правых частей ускорений звеньев
- вектор правых частей ускорений звеньев
 - вектор неизвестных ускорений звеньев.
- вектор неизвестных ускорений звеньев.
Решение системы уравнений (1.14) будет иметь вид
 (1.15)
(1.15)
Таким образом, решения (1.13) позволяют определить скорости всех звеньев механизма, а решения (1.15) – ускорения звеньев.








