 2014-02-02
2014-02-02 1330
1330Улучшение качественных характеристик
Влияние расположения нулей и полюсов передаточной функции на переходную характеристику
В устойчивой замкнутой системе имеет место следующее:
1. Близко расположенные полюса и нули взаимно компенсируются. Их расположение считается близким, если удовлетворяется неравенство |pi – pi1| £ 0,1|pi|» 0,1|pi1|. Здесь рi - нули, а pi1 – полюса соответственно.
2. Уменьшение амплитуды колебательной составляющей, создаваемой комплексными полюсами, и приближение к асимптоте экспоненциальной составляющей, создаваемой действительным полюсом, происходит тем быстрее, чем больше модуль полюса. В этом можно убедиться по переходным характеристикам колебательного и апериодического звеньев.
3. Время регулирования tпп переходной характеристики зависит в основном от абсолютного значения вещественной части доминирующих полюсов или полюса. Доминируют ближайшие к мнимой оси комплексные корни или ближайший действительный корень. Приближенное значение tпп определяют по приведенным ранее соотношениям.
4. Перерегулирование s переходной характеристики зависит от декремента затухания (отношения действительной части к мнимой) доминирующих комплексных полюсов. Приближенное значение определяют по приведенной ранее формуле.
5. Близкие к началу координат нули, если они некомпенсируют полюса, и удаленные от него, но не доминирующие, полюса увеличивают время регулирования и перерегулирование.
Проблема создания линейных непрерывных САР с хорошими или хотя бы с приемлемыми динамическими свойствами является многосторонней и весьма сложной. В ней прежде всего можно выделить следующие частные задачи: обеспечение устойчивости (стабилизация); повышение запаса устойчивости (демпфирование); повышение точности в установившихся режимах (уменьшение или устранение статической ошибки воспроизведения задающего воздействия и ошибки от возмущения); улучшение переходных процессов (увеличение быстродействия, максимальное уменьшение динамических ошибок воспроизведения задающего воздействия и ошибки от возмущения).
Каждую из этих задач решают различными способами. Иногда две или несколько частных задач могут быть решены совместно, в других случаях они оказываются противоречивыми. В зависимости от назначения системы одни задачи становятся основными, другие второстепенными.
Простой и вместе с тем действенный способ обеспечения устойчивости и высокого качества регулирования — это соответствующий выбор основных элементов системы или изменение в нужном направлении их динамических свойств местными обратными связями. Выбор типа и конструкции исполнительного элемента и усилителя может привести к тому, что их динамические свойства (прежде всего инерционность) не будут отрицательно влиять на свойства системы в целом.
Местные обратные связи весьма существенно изменяют свойства тех элементов, которые они охватывают: может быть обеспечена устойчивость неустойчивого или нейтрального элемента, уменьшена инерционность, обеспечены интегрирующие или дифференцирующие свойства. Причем местные обратные связи могут быть созданы не только в исполнительном элементе и усилителе, но и в регулируемом объекте.
Другой путь — создание дополнительных воздействий на регулятор или объект регулирования. Если это воздействие осуществляется извне, то получается комбинированная система. Примеры таких систем приведены на рис.8.6.
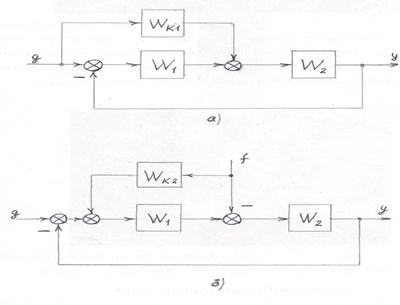
Рис.8.6. Системы комбинированного управления
Такие системы имеют весьма ценные свойства. Если величину Wk1 (рис.8.6,а) выбрать равной 1/W1, то величина ошибки от задающего воздействия g(t) будет стремиться к нулю. Если же величину Wk2 (рис.8.6,б) сделать равной 1/W2, то величина ошибки от возмущающего воздействия будет стремиться к нулю. Такие системы называют инвариантными системами.

