 2014-02-02
2014-02-02 644
644Применительно к цифровым системам управления обычный метод линеаризации разложением в ряд Тейлора с удержанием только линейного члена оказывается непригодным. Он может использоваться только для линеаризации непрерывной части ЦАС. Распространить его на цифровую часть (ЦВМ с устройствами ввода и вывода) не представляется возможным.
Сама цифровая управляющая машина может реализовать как линейные, так и нелинейные законы управления. В последнем случае линеаризация не должна осуществляться при исследовании, так как при этом будет потерян весь смысл использования нелинейных законов управления.
Входные и выходные преобразователи (рис.14.7) имеют статические характеристики ступенчатого (релейного) вида. Для подобных характеристик тангенс угла наклона либо равен нулю, либо стремится к бесконечности. Поэтому для входных и выходных преобразователей ЦВМ используется иной метод линеаризации. Он основан на предположении, обратном тому, которое принимается при линеаризации непрерывных систем. Если принять, что изменения входного сигнала по своей величине значительно больше единицы младшего разряда преобразователя, то можно пренебречь влиянием ступенчатости характеристики и линеаризовать ее, проведя некоторую «среднюю» прямую. Это поясняет рис. 14.7,а, на котором изображена начальная часть статической характеристики входного преобразователя (преобразователя непрерывной величины в код). По оси абсцисс отложено непрерывное значение задающего воздействия g, а по оси ординат
— его цифровое представление (число) go, получаемое на выходе
входного преобразователя.
Это число на рис.14.7, а дано в десятичной системе счисления. Величина единицы младшего разряда на входе обозначена d 1. Эта единица младшего разряда имеет физическую размерность, совпадающую с размерностью задающего воздействия. Естественно, что единица младшего разряда на выходе преобразователя равна безразмерной единице.
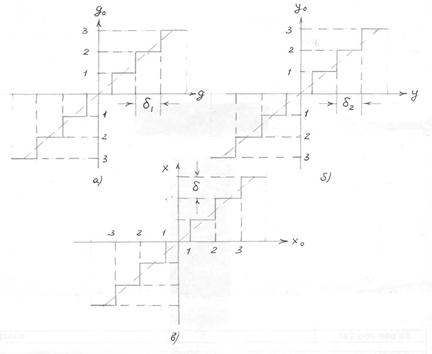
Рис.14.7. Характеристики преобразователей
В дальнейшем изложении будем предполагать, что протяженность всех горизонтальных площадок статической характеристики (рис.14.7, а) одинакова и равна единице младшего разряда d 1. Это означает, что для характеристики справедлива следующая зависимость:
g0 = E[g/d 1 +0,5 signg],
где Е — целая часть числа, заключенного в квадратные скобки.
Для линеаризованной характеристики, показанной на рис. 14.7,а штриховой линией, коэффициент передачи k1 =1/d 1 .
Наибольшая ошибка входного преобразователя при переходе от нелинейной характеристики к линейной не будет превышать по модулю значения 0,5d 1.
Число отличных от нуля уровней одной ветви рассматриваемой характеристики входного преобразователя
m1 = 2a1 -1 = gmax /d1, (14.1)
где a1 - число двоичных разрядов преобразователя (без учета знакового разряда), a gmax — максимальное значение задающего воздействия, соответствующее насыщению преобразователя.
Аналогичные рассуждения можно произвести и для входного преобразователя управляемой величины. Его статическая характеристика изображена на рис. 14.7,б. Символом у обозначено непрерывное значение управляемой величины, а символом у0 — ее цифровое представление. Единице младшего разряда на входе преобразователя соответствует величина d 2, имеющая физическую размерность управляемой величины.
Крутизна линеаризованной характеристики
k2 = 1/d2.
Число отличных от нуля уровней характеристики на одной ее ветви, если a2 - число двоичных разрядов преобразователя (без знакового разряда),
m2 = 2a2 – 1 = ymax/d2, (14.2)
где ymax/d2 - максимальное значение управляемой величины, соответствующее насыщению преобразователя.
Обычно используют такие преобразователи, что d1 = d2. и k 1 = k2. Однако это условие иногда может и не выдерживаться, особенно в тех случаях, когда в системе имеется несколько задающих и управляемых величин.
Число разрядов входных преобразователей, как правило, довольно велико и может достигать 8 — 32. Так, например, если необходимо измерять угол поворота какой-либо оси с погрешностью, не превышающей 10 ", то единица младшего разряда должна быть выбрана из условия d1 ≤ 20 ". Тогда для обеспечения измерения в пределах ±180° число разрядов в соответствии с (14.2) 
 должно быть
должно быть

В тех случаях, когда задачей системы управления является обеспечение равенства у = g, то приняв d1 = d2 , можно входные преобразователи для задающего воздействия и управляемой величины условно объединить в один преобразователь, установленный в канале ошибки.
На рис. 14.7,в изображена статическая характеристика выходного преобразователя. По оси абсцисс отложена выходная величина цифровой вычислительной машины в виде числа х0, а по оси ординат — величина х, представляющая собой выходную величину преобразователя кода в непрерывную величину совместно с экстраполятором нулевого порядка. Обычно выходная величина представляет собой электрическое напряжение или ток. Единица младшего разряда выходной величины преобразователя обозначена d, а единица младшего разряда входной величины равна безразмерной единице. Их отношение дает крутизну линеаризованной характеристики, т.е. k =d.
Если число двоичных разрядов выходного преобразователя a, то общее число отличных от нуля уровней одной ветви статической характеристики
m = 2a - 1 = хmax/d, (14.3)
где хmax — максимальное значение выходной величины.
Число разрядов выходного преобразователя обычно бывает меньше, чем число разрядов входного, так как он установлен в канале ошибки, и в пределе может быть равно единице. На рис. 14.8 в качестве примера изображены статические характеристики выходного преобразователя х = f(x0) 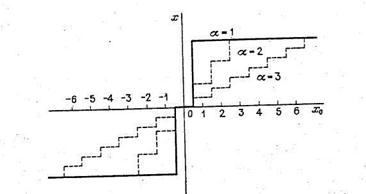
Р и с. 14.8. Примеры статических характеристик выходного преобразователя
для случая, когда максимальное значение выходной величины преобразователя хmax одно и то же, но число разрядов а = 1,2, 3.
Приведенные выше формулы (14.1), (14.2) и (14.3) справедливы для симметричных (двухтактных) характеристик. Однако не представляет труда записать их и для случая несимметричных характеристик, когда, например, |gmin| # gmax, |ymin | # ymax, |xmin| # xmax.
Если в цифровой вычислительной машине для установившегося режима получается прямая пропорциональность чисел на входе и выходе, то машина может рассматриваться как статическое звено с коэффициентом передачи k0. Наиболее вероятное значение k0 = 1. Однако возможны случаи, когда к0 # 1.
Общий линеаризованный коэффициент передачи ЦВМ совместно с входным и выходным преобразователями будет
Kц = k0 k1 k2 = k0 d/d1
Цифровая машина может сводиться не к статическому, а к интегрирующему звену. Тогда ее линеаризованный коэффициент передачи будет связывать между собой в установившемся режиме входную величину и среднюю скорость изменения выходной величины (по линейному закону).
Линеаризованная цифровая система управления может рассматриваться как импульсная. При этом учитывается только явление квантования по времени, а влиянием квантования по уровню пренебрегается. Для исследования подобных систем используется аппарат исследования импульсных систем. Однако подобное исследование должно рассматриваться как первое приближение. Необходимо в дальнейшем явление квантования по уровню и его влияние исследовать дополнительно.








