 2014-02-03
2014-02-03 1273
1273Раздел 1. Оптимальные системы. Методы теории оптимального управления
Оптимальные САУ проектируются в основном для сложных объектов, к которым относятся производственные и технологические процессы с большим количеством управляемых переменных. Автоматическую систему управления, обеспечивающую наилучшие технические или технико-экономические показатели качества при заданных реальных условиях и ограничениях называют оптимальной системой.
Оценку достижения цели в процессе управления объектом, представленную в аналитическом виде (формулой), называют критерием оптимизации (целевой функцией).
Как правило, этот критерий является функцией многих переменных и при оптимальном управлении достигает экстремального значения (min или max).
Состояние объекта управления в процессе управления можно охарактеризовать некоторыми функциями времени  , которые называются координатами состояния (переменными состояния). Эти переменные можно рассмотреть как некоторый вектор в n-мерном пространстве:
, которые называются координатами состояния (переменными состояния). Эти переменные можно рассмотреть как некоторый вектор в n-мерном пространстве:
 – вектор состояния.
– вектор состояния.
Информация о текущем состоянии объекта содержится в контролируемых выходных переменных  , которые называют выходными координатами:
, которые называют выходными координатами:
 – вектор выходных координат.
– вектор выходных координат.
Отдельные координаты состояния и выходные координаты могут совпадать. Обычно управляемые величины определяют качество работы объекта.
В реальных условиях на объект действуют также внешние и внутренние возмущения, которые вызывают нежелательные изменения переменных и изменяют величину критерия оптимизации:
 – вектор возмущающих воздействий.
– вектор возмущающих воздействий.
Для достижения желаемого результата формируется вектор управляющих воздействий:
 .
.
В оптимальных системах решается задача определения оптимального вектора управляющих воздействий.
Информация о желаемом поведении объекта содержится в векторе задающих воздействий:
 , который может формироваться самой системой.
, который может формироваться самой системой.
Обобщенная функциональная схема оптимальной системы.
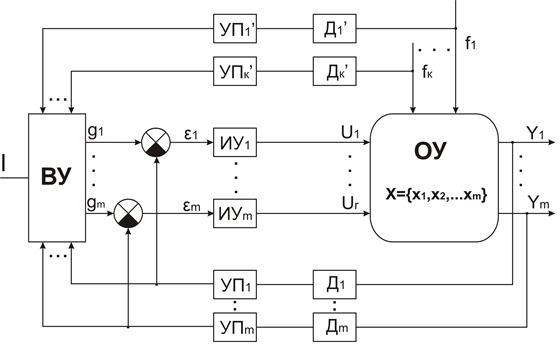
Рисунок 1.1 – Обобщенная функциональная схема оптимальной САУ
Система состоит из ОУ; датчиков Д, Д', выдающих информацию об управляемых величинах и возмущениях; усилительно-преобразовательных элементов (УП), которые преобразуют сигналы датчиков в сигналы, удобные для обработки; вычислительного устройства (ВУ), перерабатывающего эти сигналы в задающее воздействие G; исполнительных устройств (ИУ), преобразующих сигналы ошибки e=g-y в управляющие воздействия U.
При оптимизации и синтезе оптимальных систем управления возможны два типа задач:
1. Задача параметрической оптимизации: когда известна структура системы ( и
и  , выбран закон регулирования) и необходимо найти параметры настройки регулятора, которые обеспечат экстремум функционала качества.
, выбран закон регулирования) и необходимо найти параметры настройки регулятора, которые обеспечат экстремум функционала качества.
2. Задача структурно-параметрической оптимизации: известна математическая модель и структура объекта, требуется определить оптимальную структуру и параметры управляющего устройства. В этом случае вектор управления является функцией фазовых координат:
 .
.
Цель управления может быть задана различными способами. Чаще в виде допустимого значения некоторого функционала I, который называется целевой функцией либо критерием оптимизации:
 .
.
Вектор управления, который обеспечивает экстремум I, называется вектором оптимального управления  .
.
Задача оптимизации решается в два этапа:
1) вырабатывается вектор задающих воздействий:  .
.
2) отрабатываются эти задающие воздействия, т.е. они преобразуются в управляющие  .
.








