 2014-05-17
2014-05-17 7894
7894Шагающее ходовое оборудование состоит из опорной рамы (базы) и механизма шагания. Последний имеет лыжи (башмаки), механизм перемещения и привод.
Схемы механизмов шагания различаются по конструкции механизма шагания и могут быть гидравлическими и кривошипными (рис. 12.8). Они состоят из двух одинаковых, синхронно работающих механизмов шагания, расположенных симметрично, относительно продольной оси экскаватора.
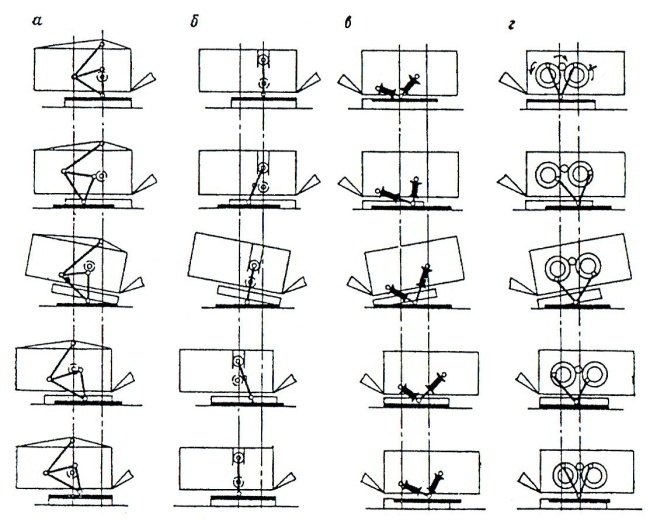
Рис. 4.12. Трехопорные схемы механизмов шагания:
а – кривошипно-шарнирного с треугольной рамой; б – кривошипно-ползункового; в гидравлического; г – двухкривошипного
При любом виде шагающего ходового оборудования полный цикл передвижения экскаватора складывается из следующих элементов: подачи лыж на грунт, подъема экскаватора, передвижения экскаватора, опускания экскаватора, подъема лыж в исходное положение.
Независимо от вида шагающего ходового оборудования (кроме специального – ЭШ 100.100 и ЭШ 65.100), в момент непосредственного передвижения, экскаватор опирается на две лыжи и на часть опорной базы. Поэтому он называется трехопорным. Поскольку у таких экскаваторов центр тяжести находится впереди оси механизма шагания, передвижение машины может быть осуществлено только в направлении противовеса.
На драглайнах НКМЗ (Украина) и на всех моделях драглайнов зарубежных фирм применяются кривошипные системы различных видов: кривошипно-шарнирная с треугольной рамой («Marion», см. рис. 4.12, а), кривошипно-ползунковая («Page», см. рис. 4.12, б), двухкривошипная («Marion», см. рис. 4.12, г), кривошипно-эксцентриковая (НКМЗ) и эксцентриковая с тягой («Marion»).
Все модели драглайнов УЗТМ (за исключением ЭШ 11.75) и модель 4250-W «Busyrus» (США) оборудованы гидравлическими механизмами шагания.
Механизм шагания с электромеханическим приводом (рис. 4.13) впервые применен на шагающем экскаваторе ЭШ 11.75 в 1996 г.
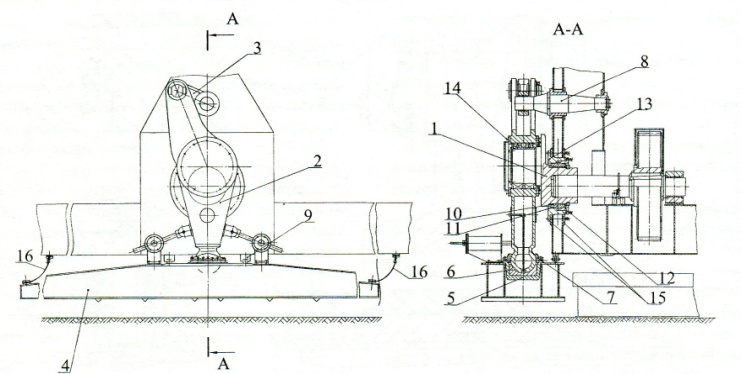
Рис. 4.13. Механизм шагания с электромеханическим приводом шагающего экскаватора ЭШ 11.75:
1 – эксцентрик с валом; 2 – нога 3 – рычаг; 4 – башмак; 5 – подпятник; 6 – вкладыш сферический; 7 – крышка; 8 – ось; 9 – опорные ролики; 10 – втулка бронзовая; 11 – втулка сферическая; 12 – крышка сферическая; 13 – корпус сферический; 14 – подшипник конический двухрядный; 15 – кольца опорные; 16 – канаты
В отличие от гидравлического, он более простой в обслуживании и эксплуатации, надежен и имеет более высокую скорость передвижения. Механизм шагания имеет электродвигатель постоянного тока, трехступенчатый редуктор, бортовые зубчатые передачи открытого типа, правые и левые эксцентриковые валы, ноги, установленные на конических подшипниках качения и башмаки с шаровыми опорами для ног.
Гидравлический механизм шагания экскаваторов ЭШ 15.90 (рис. 4.14), ЭШ 25.100 и других состоит из лыж 1, подъемного 2 и тягового 3 гидроцилиндров.
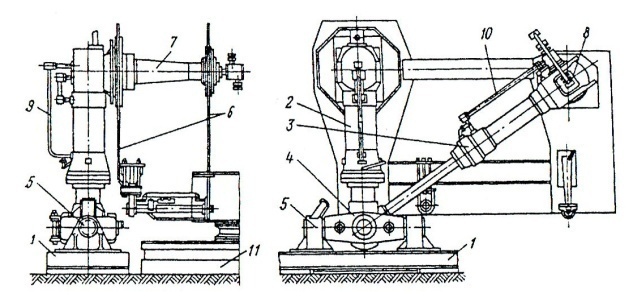
а) б)
Рис. 4.14. Гидравлический механизм шагания экскаватора ЭШ 15.90:
а – схема механизма; б – общий вид








